基于灰度相关性的SAR图像联合CFAR舰船检测算法∗
2014-03-21艾加秋
艾加秋
(中国电子科技集团公司第三十八研究所,安徽合肥230088)
0 引言
合成孔径雷达是一种高分辨率成像传感器,具有全天时和全天候观测的能力。SAR图像舰船目标检测被广泛应用在舰船检测、港口交通监控和移民控制等海洋应用中[1-4],越来越得到世界各国的高度重视,并且取得了较好的应用。
由于SAR成像系统的固有特性,SAR图像中会有相干斑点噪声的存在,这些相干斑严重影响舰船目标检测的结果,带来大量的虚警[5]。因此,许多去除相干斑的方法被提出以抑制相干斑,其中常使用的有Lee滤波[6]、Frost滤波[7-8]、Kuan滤波[9]、Gamma-MAP[10]等。但是这些滤波器可以一定程度地抑制斑点噪声,但是会使图像的边缘纹理模糊。
随着不同的天气、风速、海况,呈现在SAR图像中的海洋杂波效果也有很大的差别[11],这会导致图像中出现局部背景杂波不均匀从而影响到检测结果。
当今SAR图像逐渐发展到中高分辨率,对于舰船目标的研究除了目标检测外,还必须考虑到检测方法是否有利于目标参数提取,从而有利于后续的目标分类和识别。对于中高分辨率SAR海洋图像常用的舰船检测算法有双参数CFAR检测算法,基于K分布的CFAR检测算法和最大熵阈值检测算法(KSW)。
双参数CFAR检测算法基于背景杂波是高斯分布的假设,其核心是通过统计背景窗口中的杂波的均值和方差得到门限阈值来判断目标窗口像素是否为目标。它的检测效果容易受到海洋油污,斑点噪声和海浪运动导致的背景不均匀所带来的影响,同时对于距离太近的舰船会发生漏检。
K分布CFAR检测算法基于背景杂波是K分布的假设,通过统计海杂波得到均值和方差进而得到海杂波的灰度统计概率,通过给定的虚警率得到全局阈值来检测目标。检测结果容易受到斑点噪声和海浪运动的影响,只适合平稳海况的目标检测。
最大熵阈值检测算法(KSW算法)将信息论中的香农熵概念应用到图像分割中,通过统计图像灰度直方图的熵,并设定一个和多个阈值将图像进行分类,通过找出最佳阈值使得目标和背景分布的信息量最大。该算法适用于舰船目标和海洋背景相差大的高分辨率SAR图像检测中,而且容易受到斑点噪声、海浪运动带来的局部不均匀的影响,计算量较大。
传统的舰船目标检测算法仅使用了舰船目标同海杂波的灰度对比度,而本文提出的基于灰度相关性的联合CFAR的检测算法不仅利用了舰船目标同海杂波的灰度对比度,同时利用了舰船目标内部相邻像素之间的强灰度相关特性,建立了二维对数正态概率模型来模拟海杂波区域内相邻像素间的灰度概率特性,从而实现了联合CFAR检测。
1 舰船目标和海杂波区域内的灰度相关特性
在三维空间中,相隔某一距离的两个像素,它们具有相同的灰度级,或者具有不同的灰度级。因此,若能找出这样两个像素的联合分布的统计形式,这对于图像的纹理分析将是很有意义的。由Haralick[12]等人在20世纪70年代初期提出的灰度共生矩阵(Gray level co-occurrence matrix,GLCM)是一种用来分析图像纹理特征的重要方法,建立在估计图像的二阶组合条件概率密度函数的基础上,通过计算图像中有一定距离和一定方向的两点灰度之间的相关性,来反映图像在方向、间隔、变化幅度及快慢上的综合信息。
模板图像在各方向相邻像素的灰度共生矩阵如图1所示,左上图为一个模板,下图为对左上图的模板进行水平、垂直、对角线和反对角线四个方向相邻像素灰度共生矩阵统计结果。

图1 灰度共生矩阵示意图
在SAR海洋图像中,海杂波区域相隔某一距离的两个像素的灰度值具有一定的相关性,而舰船目标区域内相邻像素间灰度值也具有一定的相关性,并且海杂波区域和目标区域的灰度级存在很大的差异,两者的灰度共生矩阵集中分布区域也不一样。图2为统计海杂波和舰船目标的水平方向相邻像素的灰度共生矩阵图,其中左上图为含有舰船目标和海杂波的真实SAR图像,右上图为统计左上图SAR图像海杂波区域的水平方向相邻像素的灰度共生矩阵,左下图为统计左上图SAR图像舰船目标区域的水平方向相邻像素的灰度共生矩阵,右下图为将左下图中圆圈标注区域进行放大的示意图。
由图2可知,海杂波的灰度共生矩阵集中在低端,而舰船目标的灰度共生矩阵集中在高端,为了清晰地看出舰船目标的灰度共生矩阵集中在高端,特意将分布在高端区域的灰度共生矩阵放大,可以看出舰船目标的灰度共生矩阵集中在高端。
因此,若能找出海杂波区域和目标区域中两个像素的灰度联合分布的统计形式,则可以将舰船目标从海杂波背景中提取出来,从而实现联合CFAR检测。
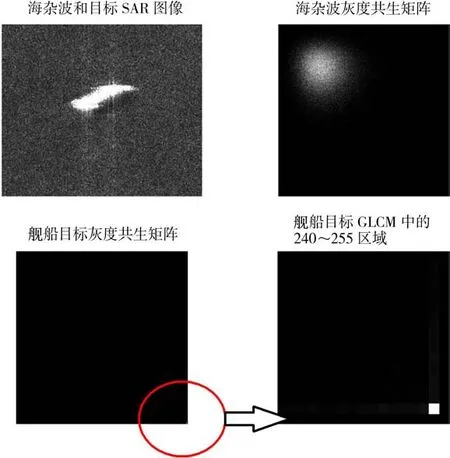
图2 海杂波和舰船目标灰度共生矩阵示意图
2 基于灰度相关性的联合CFAR检测算法
上一节定性分析了SAR图像中四个方向相邻像素之间的灰度相关性。为了定量分析四个方向相邻像素之间的灰度相关程度,这里引入空间相关度因子来定量表征其相关度。四个方向相邻像素如图3所示,包括水平、垂直、斜线角和反斜线角四个方向。

图3 四个方向相邻像素示意图
海杂波区域内四个方向相邻像素的空间灰度相关度因子可以通过式(1)估计得到[13]:

也即

式中,μ为图像的灰度均值,l和k分别为水平方向和垂直方向的位移。通过式(2)和式(3)可以估计出四个方向的灰度相关因子,也即
水平方向:l=0,k=1

垂直方向:l=1,k=0
135°反斜线角方向:l=1,k=1
接下来将重点介绍本文的核心部分:基于灰度相关度的联合CFAR检测算法。
对数正态分布是海杂波灰度概率建模的常用模型之一,图4为SAR图像的直方图及使用Rayleigh、Gamma、Weibull、K分布和对数正态分布拟合的效果对比图。从图中可以看出对数正态分布很好地拟合了海杂波的长拖尾效应。
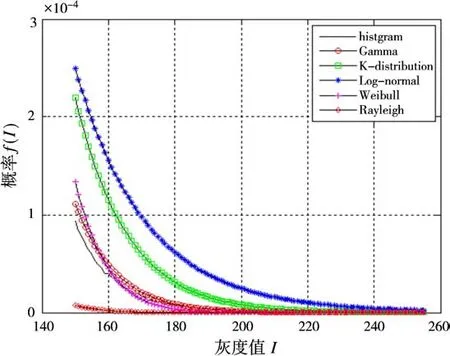
图4 海杂波灰度直方图和概率模型拟合效果对比图
对数正态分布被用来对海杂波灰度概率分布进行建模。假设SAR图像的某一像素X和其相邻像素Y,它们的灰度值都服从对数正态分布。假定x=ln(X),y=ln(Y),则变量x和y的值服从正态分布。事实上,当变量x和y不是相互独立时,我们并不能推断出变量x和y的联合概率分布,但是通过对大量SAR图像数据中相邻像素灰度值的对数值x和y进行联合概率统计,我们发现x和y的联合概率分布接近相关度因子为r的二维高斯分布。因此我们使用相关度因子为r的二维高斯分布来对x和y的联合概率分布进行建模,也即

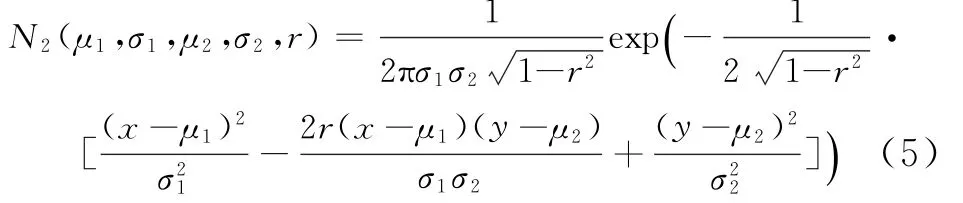
因此,像素(i,j)和θ方向相邻像素f(i,j,θ)的灰度值X和Y的值服从相关度因子为r的二维联合对数正态分布(2DLN),也即

四个方向的相邻像素间的灰度值相关度因子都通过式(2)估计得到,因此四个方向的相邻像素间的灰度值的联合概率分布模型为
水平方向:

45°斜线角方向:

垂直方向:

135°斜线角方向:

不同相关度因子r下的二维对数正态分布模型轮廓图如图5所示,从图中可以看出,r越大,2DLN模型越向对角线方向集中,而且其分布越接近一维对数正态分布,当|r|=1时,相邻像素的灰度值联合概率分布就是一维对数正态分布。
为了验证2DLN模型可以很好地拟合真实SAR图像水平方向相邻像素间的灰度联合概率分布,特此进行拟合实验。图6(a)为真实SAR图像水平方向相邻像素间灰度值联合统计分布,图6(b)为对SAR图像使用2DLN模型拟合的效果图,从图中可以看出:2DLN模型很好地描述了SAR图像海杂波相邻像素间灰度值的联合概率分布。

图5 不同相关度因子r下的二维对数正态分布模型轮廓图
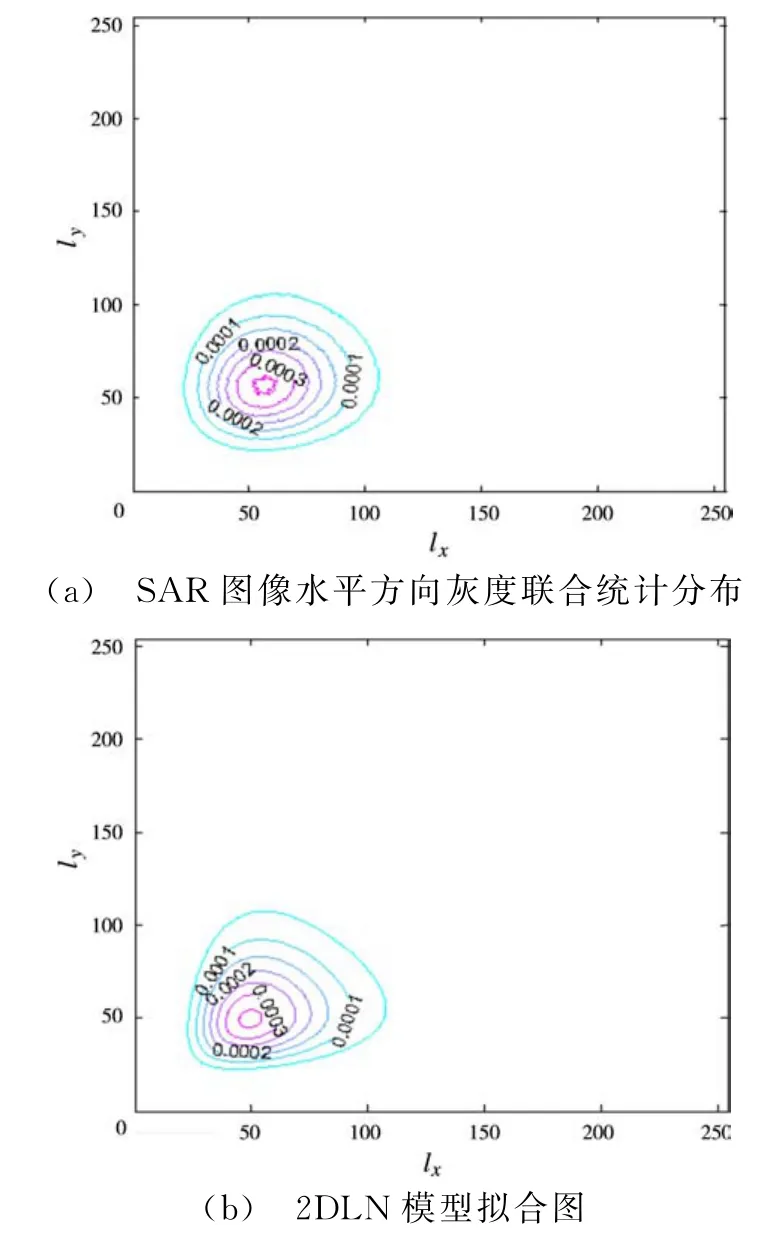
图6 SAR图像水平方向相邻像素灰度值联合统计分布及2DLN模型拟合效果
利用基于二维对数正态分布的联合CFAR舰船检测算法来提取舰船目标是利用了舰船区域像素之间的相关性,而由于图像中的舰船的航行方向不一样,如图7所示。为了更好地提取出舰船目标,可以利用2DLN模型来对四个方向分别进行联合CFAR检测,得到四个方向的检测结果,最后将四个方向提取的结果进行融合,从而得到最终的检测结果。

图7 各种航行方向的舰船图
假定SAR图像为平稳海况下所获得,也即SAR图像海杂波的后向散射系数较为均匀,此时可以对整幅SAR图像使用联合CFAR检测。否则,可以先将SAR图像分割成不同的区域[10]:低风速区(LWR)、正常风速区加过度区域(NWR+TR),分别对不同的区域进行联合CFAR检测。

水平方向:若f(i,j)>T,并且f(i,j+1)>T,则fd(i,j)=1,fd(i,j+1)=1
45°方向:若f(i,j)>T,并且f(i-1,j+1)>T,则fd(i,j)=1,fd(i-1,j+1)=1
垂直方向:若f(i,j)>T,并且f(i+1,j)>T,则fd(i,j)=1,fd(i+1,j)=1

式中,fd为检测结果,fd中标识为“1”的点将视为目标。联合CFAR检测算法综合利用了舰船目标和海杂波的灰度对比度及舰船目标区域内相邻像素间的强灰度相关度,其具体检测步骤为:
第一步 数据预处理,利用地理信息系统屏蔽陆地和岛屿;
第二步 为了得到更好的检测结果,将后向散射系数不均匀的图像分割成几个均匀灰度区域;
第三步 建立各个方向的灰度联合概率分布,通过给定的虚警率来得到四个不同方向的阈值;
第四步 对四个方向分别进行联合CFAR检测得到四个检测结果,并将四个方向的检测结果进行融合,本文采用将四个方向得到的检测结果使用“或”运算进行融合;
第五步 融合后的图像的目标可能会产生断裂不连通,因此应该采用形态学处理法对断裂的舰船部分进行连接从而得到最终的检测结果。
为了验证联合CFAR检测算法的检测性能,下面将基于二维对数正态分布的联合CFAR检测算法(2DLN detector)同传统的基于对数正态分布的一维检测算法(1DLN detector)的检测结果进行性能对比,图8为使用两种检测算法对同一幅图像进行检测的ROC曲线图,在相同的虚警概率PFA下,2DLN检测算法的检测概率Pd(虚线表示)优于传统的1DLN检测算法(实线表示)。

图8 两种检测算法的检测结果ROC曲线对比图
从图8可以得出结论:2DLN CFAR检测算法的检测性能要优于1DLN CFAR检测算法。这是因为1DLN CFAR检测算法仅仅利用了舰船目标同海杂波的灰度对比度,而2DLN CFAR检测算法不仅利用了舰船目标同海杂波的灰度对比度,而且还利用了舰船目标区域内相邻像素间的强灰度相关特性。
3 实验结果对比分析
为了验证本文提出的基于二维对数正态分布的联合CFAR检测算法的优越检测性能,选用了大量的复杂海况、强斑点噪声SAR图像作为实验对象,并将其检测结果同传统的1DLN CFAR检测算法、KSW检测算法进行检测性能对比。实验中,1DLN CFAR检测算法和2DLN CFAR检测算法的虚警率相同,都是Pfa=10-4。而KSW算法为使用最佳阈值数进行最大熵阈值分割的结果。为了保证性能验证的公平性,所有检测结果都是没有经过后处理的初步检测结果。
图9为使用三种检测算法对强斑点噪声SAR图像进行检测的对比图,检测结果图中圆圈框定为目标,其余的白点为虚警。图9(a)为原SAR图像,(b)为应用1DLN CFAR算法的检测结果,(c)为应用KSW算法的检测结果,(d)为应用2DLN CFAR算法的检测结果。

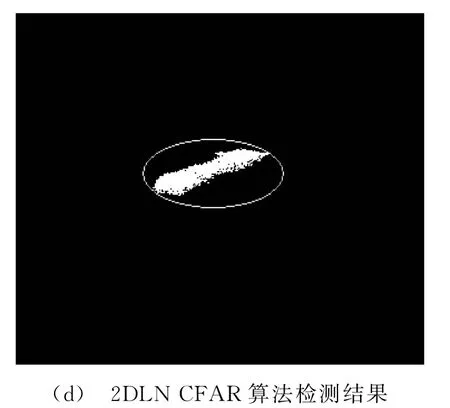
图9 应用三种算法对强斑点噪声SAR图像进行舰船检测得到的比较效果图
图10为使用三种检测算法对复杂海况RADARSAT SAR图像进行检测的对比图,检测结果图中圆圈框定为目标,其余的白点为虚警。图10(a)为原RADARSAT图像,(b)为应用1DLN CFAR算法的检测结果,(c)为应用KSW算法的检测结果,(d)为应用2DLN CFAR算法的检测结果。
通过上述实验对比,可以得出:传统的1DLN CFAR检测算法和KSW算法受斑点噪声和海况影响容易产生虚警,而1DLN CFAR联合检测算法充分利用了舰船目标同海杂波的灰度对比度和舰船目标区域内相邻像素间的强灰度相关特性,受斑点噪声影响很小,并且具有很强的鲁棒性。但是,2DLN CFAR联合检测算法使用了相邻像素间的相关度,它不适用于低分辨率的点目标的检测,而适用于中高分辨率的面目标的舰船目标检测,同时,其检测结果中的舰船目标会发生断裂,需要进行连接运算。
4 结束语
本文研究了舰船目标和海杂波的差异特征,充分利用了舰船目标同海杂波的灰度对比度和舰船目标内相邻像素间的强灰度相关性,提出了一种基于二维对数正态分布的联合CFAR检测算法。相比于传统的检测算法,该算法的检测结果受斑点噪声和海况的影响较小,检测性能优于传统的检测算法。该算法在实际应用中取得了很好的检测效果,尤其是在强斑点噪声、复杂海况的中高分辨率SAR图像的舰船目标检测中有很好的实用价值。
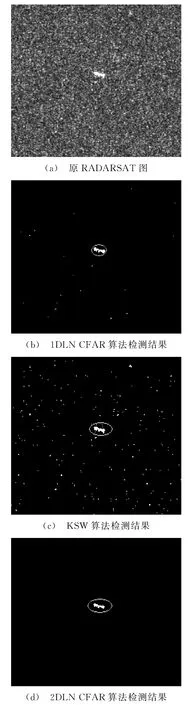
图10 应用三种算法对复杂海况RADARSAT SAR图像进行舰船检测得到的比较效果图
然而,本文算法也存在着不足:(1)本文的海杂波灰度概率分布模型选为对数正态分布,然而,还有其他模型可用于海杂波灰度概率建模中,因此,在未来的工作中,我们将二维联合概率分布模型推广到其他模型中;(2)本文的联合CFAR检测阈值通过二维积分得到,计算复杂度要强于传统的一维CFAR检测算法(图10中,1DLN CFAR检测算法的检测时间为0.25s,而2DLN CFAR检测算法的检测时间为5.35s),在未来的工作中,可以开发出积分查找表来查找阈值。
[1]曹峰,邢相薇,计科峰.一种SAR图像舰船目标快速检测方法[J].雷达科学与技术,2012,10(4):380-386.CAO Feng,XING Xiang-wei,JI Ke-feng.A Fast Method for Ship Detection in SAR Imagery[J].Radar Science and Technology,2012,10(4):380-386.(in Chinese)
[2]徐晋,付启众,陆鹏程,等.米波雷达对海面目标探测性能分析与验证[J].雷达科学与技术,2012,10(4):376-379.XU Jin,FU Qi-zhong,LU Peng-cheng,et al.Analysis and Experiment Verification of Maritime Target Detection Performance of Meter-Wave Radar[J].Radar Science and Technology,2012,10(4):376-379.(in Chinese)
[3]李长凯,杨学志,徐康,等.基于瞬态系数梯度的SAR图像分割方法[J].合肥工业大学学报(自然科学版),2011,34(2):215-220.
[4]王卫卫,席灯炎,杨土恭鹏,等.利用结构纹理分解的海洋舰船目标检测[J].西安电子科技大学学报,2012,39(4):131-137.
[5]种劲松,朱敏慧.SAR图像窗口K-分布目标检测算法[J].电子与信息学报,2003,25(9):1276-1280.
[6]LEE K C,OU J S,FANG M C.Application of SVD Noise-Reduction Technique to PCA Based Radar Target Recognition[C]∥Progress in Electromagnetics Research,[s.l.]:[s.n.],2008:447-459.
[7]LEE J S.Speckle Analysis and Smoothing of Synthetic Aperture Radar Images[J].Computer Graphics and Image Processing,1981,17(1):24-32.
[8]吴保奎,范素凤.改进的基于小波变换SAR图像去噪方法的性能评价[J].合肥工业大学学报(自然科学版),2006,29(3):379-381.
[9]FROST V S,STILES J A,SHANMUGAN K S,et al.A Model for Radar Images and Its Application to Adaptive Digital Filtering of Multiplicative Noise[J].IEEE Trans on Pattern Analysis and Machine Intelligence,1982,4(2):157-166.
[10]KUAN D T,SAWCHUK A A,STRAND T C,et al.Adaptive Noise Smoothing Filter for Images with Signal-Dependent Noise[J].IEEE Trans on Pattern Analysis and Machine Intelligence,1985,7(2):165-177.
[11]BLAKE A P,BLACKNELL D,OLIVER C J.Sea Clutter Analysis and Its Resolution Dependence[C]∥Radar 97,British Crown:[s.n.],1997:124-128.
[12]HARALICK R M,SHANMUGAM K,DINSTEIN I.Textural Features for Image Classification[J].IEEE Trans on Systems,Man and Cybernetics,1973:3(6):610-621.
[13]BROMMUNDT J,BARDOSSY A.Spatial Correlation of Radar and Gauge Precipitation Data in High Temporal Resolution[C]∥Advances in Geosciences,[s.l.]:[s.n.],2007:103-109.
