机载气象雷达下和差波束抑制地杂波研究∗
2014-03-21朱岱寅
庄 健,朱岱寅
(中航雷达与电子设备研究院,江苏无锡214063)
0 引言
机载气象雷达具有气象目标检测、气象预警等功能,它极大地提高了气象预警的实时性和准确性[1]。在机载雷达系统中,气象检测面临的最主要问题就是地杂波的干扰。由于机载雷达工作时一般处于下视模式,波束必然会照射到地面目标,面临着比地基气象雷达更严重的地面杂波,杂波范围分布广且强度大,特别是在丘陵和山区地带,杂波强度将达到60~90 dB[2-3],这将给区分降水类型和分析气象条件等带来极大的困难。因此有效地抑制地杂波,不仅能改善机载气象雷达系统性能,而且对提高机载雷达系统检测目标的能力具有十分重要的意义[4]。
早期的气象雷达抑制地杂波方法有杂波图法,缺点是需要存储的地物信息量较大。相参动目标显示法通过气象与地物的频谱差异抑制地杂波,当无风或载机运动带来多普勒频率时抑制效果也不好。多扫描方法是通过多扫描,利用气象和地物位于空间上不同距离位置从而改变天线俯角减少地面回波信号[5-6],这种方法对于近距离和远距离处杂波抑制是有效的,在中距离处两者混合很难区分,抑制效果不好。为此提出和差波束方法抑制地杂波,在雷达波束照射到的某一距离处,每个气象目标与波束中心夹角并不相同,而地杂波与波束中心夹角总是一致,通过和差信号转换处理,地杂波的差信号反演得到的和信号与天线接收到的和信号差别不大,两者相减后杂波大部分被抑制,而气象的差信号反演得到的和信号与天线接收到的和信号差别很大,相减并不会损失气象信息,因此提出基于和差波束的地杂波抑制方法。
本文介绍了和差波束的原理,给出了基于和差波束的机载气象雷达下具体的地杂波抑制实施步骤,并提出了波束中心干扰解决方法。通过对机载气象雷达的仿真数据分析结果,验证了该算法的有效性。
1 单脉冲和差波束原理
假设在θ方向有一远区目标,则到达接收点的目标所反射的电波近似为平面波。由于两天线间距为d,故它们所收到的信号由于存在波程差ΔR而产生相位差φ,由图1可知:

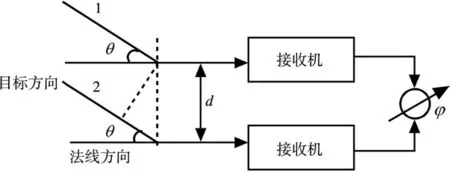
图1 和差波束相位差关系图
和差波束单脉冲测角原理如图2所示,φ为波程差引起的相位差,两天线接收到的回波信号为E,则和差信号分别为
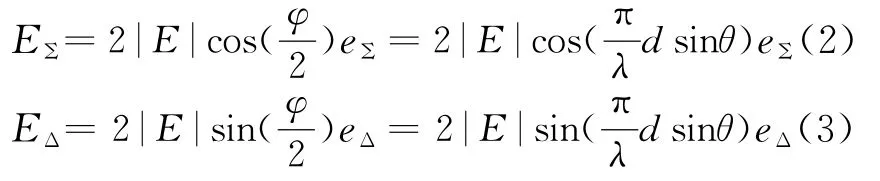
和差信号之间关系为

差信号的振幅大小表明了目标误差角的大小,即目标偏离天线轴的程度,其相位则表示目标偏离天线轴线的方向[7]。和信号的相位与目标偏离天线轴线的方向无关,主要用于目标检测和作为差信号的相位基准。和、差信号的相位相差90°。
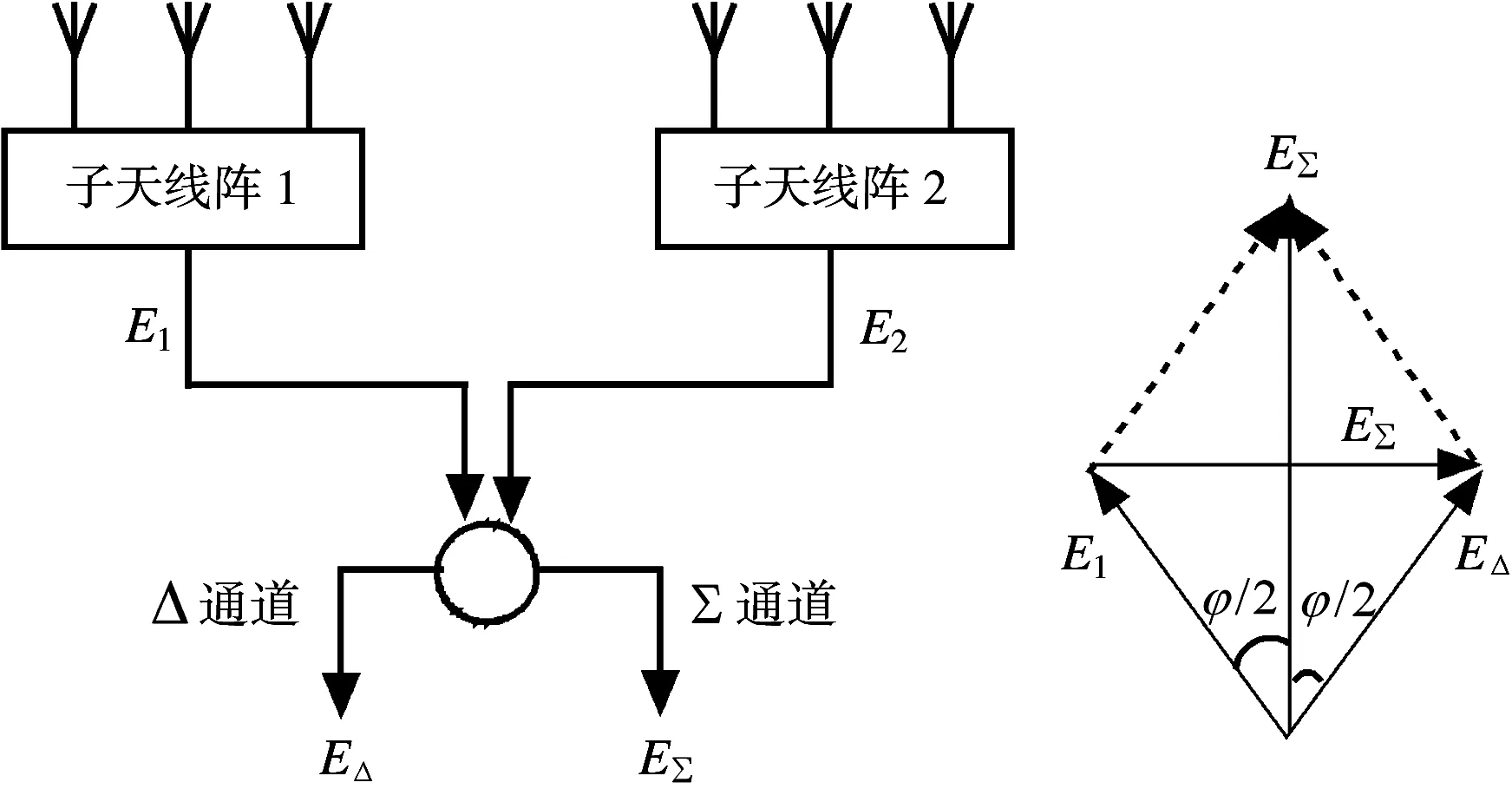
图2 和差波束原理图
2 基于和差波束的机载雷达地杂波抑制
2.1 机载雷达的和差波束抑制地杂波原理
由于地物杂波属于面目标,相同距离门内所有目标在雷达波束垂直方向内,相对于波束中心的夹角大小和所处波束中心上下位置都是一致的,目标回波功率可以进行相加,最后通过差信号反演出的和信号与天线接收到地杂波的和信号基本没有差别,两者相减后,地杂波会被大部分抑制;而气象目标属于体目标,相同距离门内的所有目标在雷达波束垂直方向内,相对于波束中心的夹角大小和所处波束中心上下位置都不是一致的,目标回波功率相差很大,所以差信号反演出的和信号与天线接收到气象回波的和信号相差很大,两者相减后,气象回波不会被衰减得厉害。基于以上分析,提出了利用单脉冲测角系统中的和、差波束,进行自适应地杂波的抑制。
如图3中,在波束范围内距雷达R处有两目标,目标1为气象信号,与波束中心夹角为θ1;目标2为地杂波,与波束中心夹角为θ2。通过气象雷达方程计算目标1的气象回波功率为P1,地杂波回波功率为P2,得到和信号功率为

差信号功率为

其中由式(1)可知:

由式(4)知差信号反演得到的和信号为

前后两次和信号相减得到

这样便只留下了气象的信息,而地杂波被抑制了。这就是和差波束抑制地杂波的原理。
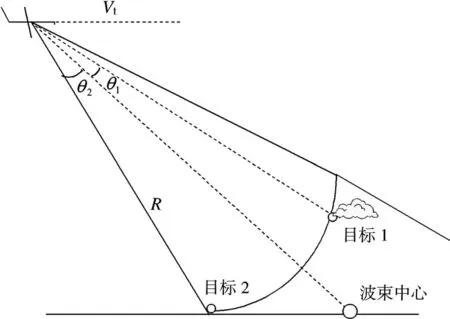
图3 机载雷达下和差波束原理图
2.2 和差波束方法步骤
和差波束方法步骤如下:
第一步,设置大地坐标系下的飞机的初始位置及波束扫描的俯仰角度。建立气象信号云层大小位置和地杂波模型。
第二步,根据飞机扫描的波束范围,计算相同距离内云层和地面的回波功率,分别得到和信号、差信号。
第三步,数据处理,根据雷达地面间直线与波束中心所成夹角计算差信号反演出的和信号,再与天线接收到的和信号两者相减,以此来抑制地杂波。
第四步,去除波束中心与地面相交处的地杂波,计算处理前后信噪比大小。
2.3 和差波束方法缺陷
和差波束方法是基于气象和地物杂波所处雷达扫描波束中心位置不同而抑制地杂波的原理。在波束中心触底位置,该处地杂波与波束中心的夹角为零,地杂波的差信号幅值为零,反演得到的和信号很大,前后两次和信号相减会引起功率过大,带来失真,在该位置地杂波不能被很好地抑制,只能人为地剔除该处的回波功率。也可改变波束下俯角进行第二次扫描后与第一次的回波功率图相比较,便能排除波束中心的干扰。
3 仿真数据处理结果与分析
3.1 气象回波模拟
为了模拟气象云层信息,查阅资料[8],我们选择雷暴云的水平最大直径为6 km,云层高度为5 km。然后根据云层大小,将云层分解成多个100 m×100 m×100m的立体单元。按照介电常数和反射率因子的不同给每一个立体小单元赋予不同的反射率数值。考虑到云层是环绕地球的表面分布,在模拟气象信息时,云层在大地坐标系中应有倾斜角度。气象参数如表1所示。
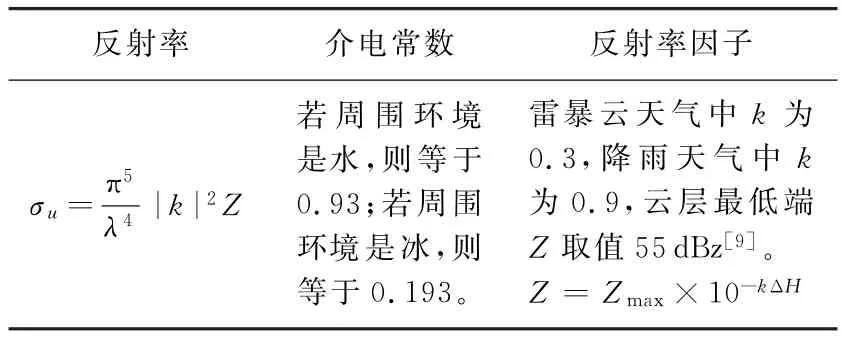
表1 气象参数
根据气象雷达的基本方程:

式中,
代入式(10)可求得云层中的某一个小单元雷达回波的平均功率为

为了验证仿真的云层回波的正确性,我们对气象回波功率谱的仿真结果与理论结果进行比较,云的速度标准差为2 m/s,雷达发射功率为150 W,脉冲重复频率为2 000 Hz,图4为气象回波功率谱的仿真值与理论值。
3.2 地物回波模拟
为了简便模型,将机载雷达下方地面分成多个100 m×100 m的平面单元,地杂波范围为一矩形,宽为54 km,长为630 km。然后根据地杂波的线性模型,赋予每个单元不同的散射系数[10-11]。地面杂波散射因子参数如表2所示。
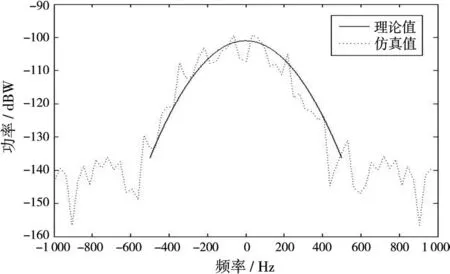
图4 气象回波功率谱的仿真值与理论值
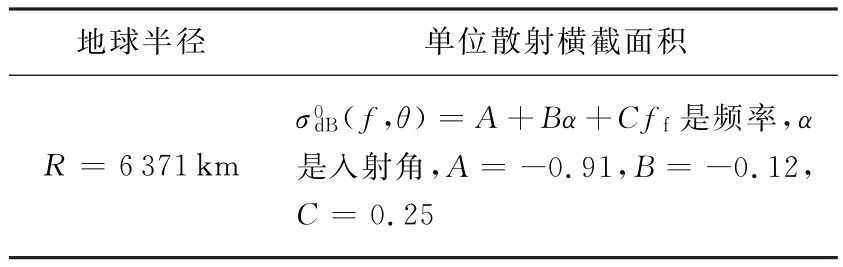
表2 地面参数
地面上单位单元反射的雷达回波功率的计算公式如下:
3.3 和差波束方法仿真
下面通过仿真实验验证和差波束抑制杂波的性能,仿真中采用的系统参数如表3所示,其中云层离地高度为1 km,波束下俯角为5°,飞机距云层中心距离为50 km。当机载雷达探测正前方云层时,气象回波和地杂波混叠在一起。横坐标表示目标与雷达之间的距离,表3为仿真时机载雷达参数。
仿真结果分析如下:图5为仿真的气象和差功率图,图6为仿真的地杂波和差功率图,可知雷达接收到的气象信息会淹没在地杂波中。图7为采用和差波束方法抑制地杂波前后功率对比图。抑制杂波后在距离为50 km处有气象信号,距离60 km处有回波干扰。通过机载雷达高度,地球半径和下俯角度的参数可计算出雷达波束中心到达地面距离约为60 km。分析和差波束抑制地杂波的缺陷可知,波束中心处会带来信号的失真。因此图7中抑制地杂波后会在该处距离单元上出现杂波干扰信息。为了排除波束中心处的干扰,可通过改变下俯角进行二次扫描,并与第一次结果相比较。图8为下俯角分别为5°和4°时抑制地杂波后雷达回波功率对比图,为了比较波束中心的变化,我们观察雷达前方100 km内的回波功率图,由图8可知,下俯角为5°时距离60 km处有一波峰,当下俯角为4°时距离为80 km处也有一处波峰,而距离为50 km处的信号强度没有改变,由此可知,第二个波峰为波束中心带来的失真,进行气象雷达数据处理时应加滤波器加以滤除。
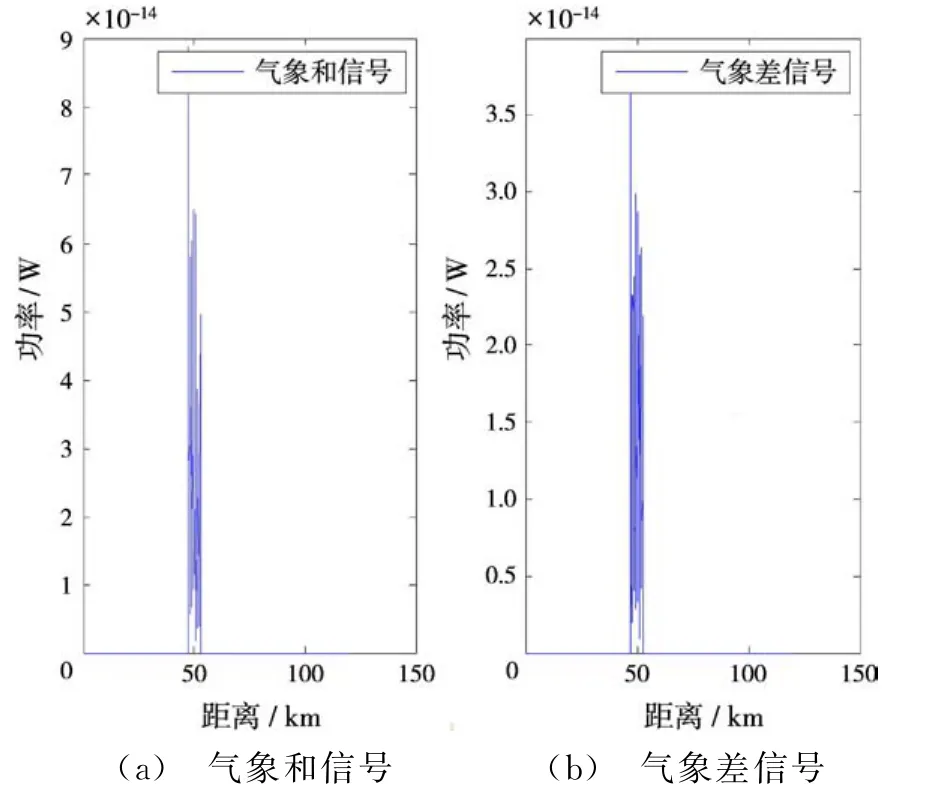
图5 气象的和信号与差信号回波功率图
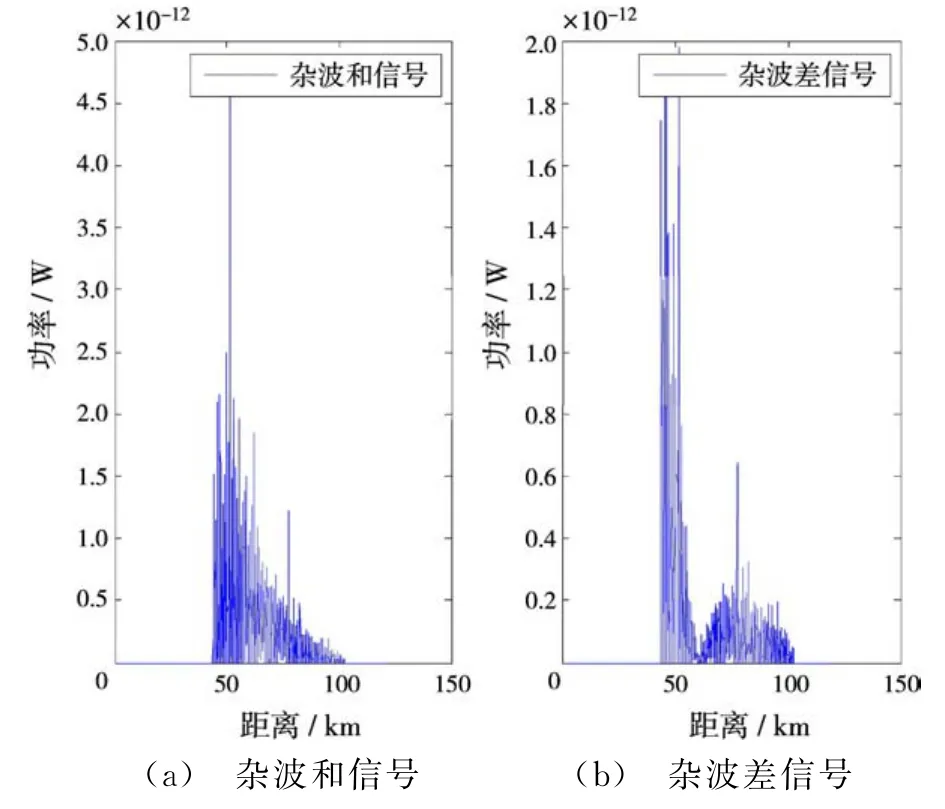
图6 杂波的和信号与差信号回波功率图
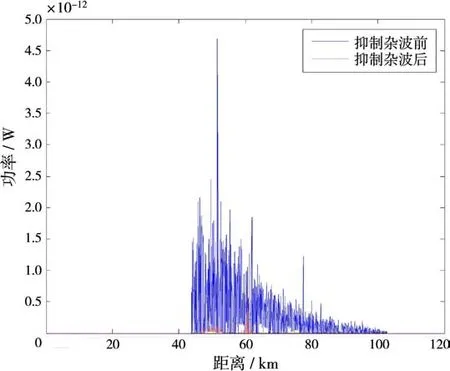
图7 抑制地杂波前后回波功率图
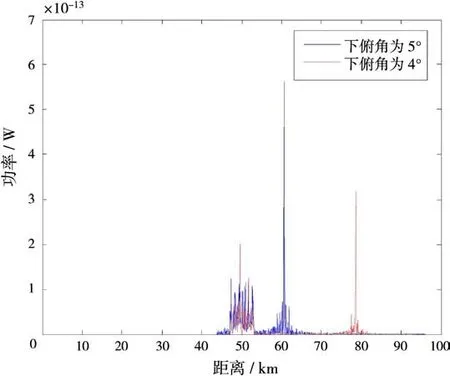
图8 下俯角分别为5°和4°时回波信号功率图
由图9可知,与雷达距离从48~54 km之间的气象信息从杂波中区分出来了,同时其他距离上的地杂波强度也大为下降,经计算仿真的信杂比约为-19.3 d B,和差波束抑制杂波后的信杂比为6.6 dB。前后的信杂比改变有25.9 dB。
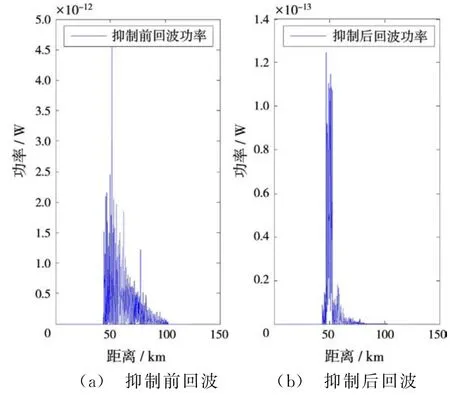
图9 和差波束抑制杂波前后雷达回波功率图
4 结束语
本文首先介绍了单脉冲和差波束原理,然后针对机载气象雷达回波中地杂波与气象的和差波束特点,提出了基于和差波束下的地杂波抑制方法。通过仿真实验,利用和差波束对消地杂波方法是可行的。但是需要根据气象目标与机载雷达之间距离计算波束中心位置,消除波束中心处的地杂波干扰。该方法在工程实践中具有一定的使用价值。
[1]秦娟,吴仁彪,苏志刚,等.基于DEM的机载气象雷达地杂波剔除方法[J].信号处理,2011,27(10):1484-1488.
[2]谢文冲.非均匀环境下的机载雷达STAP方法与目标检测技术研究[D].长沙:国防科技大学,2006.
[3]蔡成仁.彩色气象雷达[M].北京:国防工业出版社,1992.
[4]金兴海,朱岱寅.基于改进MNE算法的动目标检测技术[J].雷达科学与技术,2012,10(3):305-309.
[5]SWEET S R.Automatic Weather Radar System and Method:US,7205928 B1[P].2007-04-17.
[6]WOODELL D L.Method and System for Suppressing Ground Clutter Returns on an Airborne Weather Radar:US,6603425 B1[P].2003-08-05.
[7]丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2002.
[8]段华军.机载气象雷达回波信号模拟与地杂波抑制方法研究[D].南京:南京航空航天大学,2011.
[9]李玉林,杨梅,李玉芳.夏季雷暴云雷达回波特征分析[J].气象,2001,27(10):33-37.
[10]SKOLNIK M I.雷达手册[M].北京:电子工业出版社,2003.
[11]MOORE R K.微波遥感(第二卷)[M].北京:科学出版社,1987.