不确定模糊系统的H∞鲁棒动态输出反馈控制
2014-03-13赵云
赵云
(中国民航大学设备处,天津 300300)
不确定模糊系统的H∞鲁棒动态输出反馈控制
赵云
(中国民航大学设备处,天津 300300)
研究不确定T-S模糊系统的H∞鲁棒控制问题,选取全局动态输出反馈控制器,得到系统稳定的充分条件。在此基础上,为方便运用计算机进行求解,对矩阵进行非奇异分解,将条件转化为求解线性矩阵不等式的问题,并进一步通过变量之间的关系求得动态输出反馈控制器的待确定矩阵。选取了全局动态输出反馈控制器来研究不确定模糊系统的稳定性,并考虑了加入外界干扰后,系统满足H∞鲁棒控制性能。最后的数值算例说明方法的可行性与有效性。
不确定系统;动态输出反馈控制器;线性矩阵不等式;H∞性能指标
在工业建模过程中,非线性、不确定性是普遍存在的现象。T-S作为一种有效解决非线性问题稳定性的有效方法,自其提出以来,便取得了众多学者的关注。在非线性系统稳定性方面的研究取得了巨大的成就。对于模糊系统的稳定性研究主要为状态反馈和输出反馈的研究,然而,系统的状态反馈控制律的应用要求系统的状态可测,所以对于状态不可测的系统不适合运用状态反馈研究系统的稳定性。如果用系统的输出反馈可以达到闭环系统的稳定性,则更适合运用输出反馈的控制方式。目前的研究多为静态输出反馈控制,文献[1-3]均为系统的输出反馈控制。
动态输出反馈能够动态地把握系统的稳定性,增加系统稳定性的鲁棒性。所以动态输出反馈控制的研究更具有实际意义。文献[4]研究了一类不确定离散模糊的H∞鲁棒动态输出反馈控制;文献[5]则研究了分布时滞系统的输出动态反馈镇定问题,运用Lyapunov-Krasovskii泛函的构造和解析技巧,建立了与时滞相关的控制器存在性判据;文献[6]研究了不确定脉冲系统动态输出反馈H∞控制问题。文献[5-6]均不是模糊系统,文献[4]是模糊离散系统且动态输出反馈控制器的设计有所局限。本文在已有的理论基础上,选取动态输出反馈控制器,考虑不确定模糊连续系统的H∞控制问题。通过对正定对称矩阵进行非奇异分解,得到满足系统稳定性的线性矩阵不等式的充分条件。最后用数值算例验证了方法的可行性。
1 问题描述
考虑到由模糊T-S模型所描述的不确定非线性系统:
第i条模糊推理规则:如果z1(t)是Fi1且z2(t)是Fi2……且zn(t)是Fin,则

其中:Fij(i=1,2,…,r,j=1,2,…,n)是模糊集合;r是模糊规则数;z1(t),z2(t),…,zn(t)是依赖可测量变量的前件变量;x(t)∈Rn是状态变量;u(t)∈Rm是系统的控制输入;z(t)∈Rl是系统的控制输出;y(t)∈Rm是观测变量;w(t)∈Rm是系统的外界干扰;Ai,Bi,B2i,C1i,C2i,Di,D1i,D2i是适当维数的矩阵;ΔAi,ΔBi是适当维数的矩阵,在系统模型中表示结构不确定。
应用单点模糊化、成绩推理和中心加权反模糊化推理方法,得到全局模糊系统(1)模型

Fij(zj(t))是zj(t)关于模糊集Fij的隶属函数,αi(z(t))满足
假设假设不确定系统参数不确定的矩阵是模有界的,其形式为

其中:Mi,N1i和N2i是已知适当维数矩阵;Fi(t)是未知函数矩阵,其每个元素是Lebesgue可测的函数,并满足FiT(t)Fi(t)≤I,其中I是单位阵。
对于模糊系统(1),根据模糊平行分布补偿算法(PDC),设计全局动态模糊输出反馈控制器如下:
模糊规则i:如果z1(t)是Fi1且z2(t)是Fi2……且zn(t)是Fin,则


将全局动态模糊输出反馈控制器(2)应用到模糊系统(1),得到闭环系统(3)如下

引理1 对具有适当维数的常数矩阵D、E及对称常数矩阵S,矩阵不等式[7]

成立的充要条件是,∃ε>0满足下面的矩阵不等式

引理2 对具有适当维数的矩阵X,Y则∀ε>0,有下列不等式[8]

定义1 对任意非零w(t)∈L2[0,∞)成立,满足

2 主要结论
本文的目的是设计全局动态模糊输出反馈控制器(2)使得系统(1)稳定且满足H∞控制。首先考虑系统稳定的条件,继而根据矩阵的非奇异分解,将充分条件转化为线性矩阵不等式,以方便借助计算机进行求解。
定理1 对于给定的γ>0,如果存在ε>0和正定对称矩阵P满足下列矩阵不等式,则闭环系统(3)鲁棒渐近稳定且满足H∞控制性能

证明取Lyapunov函数V(ξ(t))=ξT(t)Pξ(t),首先考虑w(t)=0

由Schur分解可得

根据式(5)可得式(7)成立,所以式(6)成立。

下面考虑加入外界干扰后,系统(3)的H∞控制性能。取

根据引理1,上式小于0的充分必要条件是:∃ε>0,满足下面的矩阵不等式
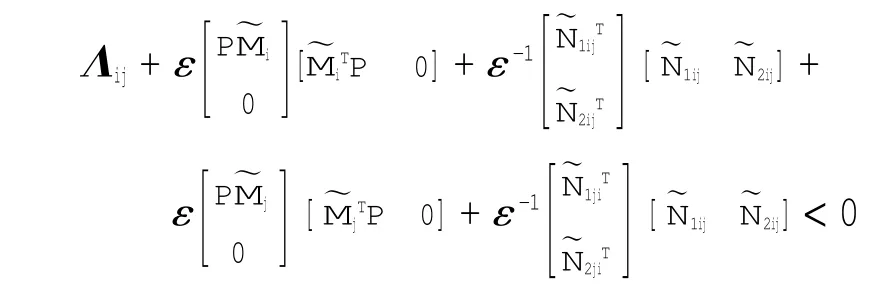
根据Schur分解可得式(5),由式(5)成立可得

同理,由(4)成立可得

由式(9)和式(10)易得J(t)<0。
由J(t)=V˙(x(t))+zT(t)z(t)-γ wT(t)w(t)<0,两边对t积分得

因为V(x(t))>0,所以

系统(3)满足H∞控制性能。
定理2 对于给定的γ>0,如果存在ε>0,正定对称矩阵X、Y和矩阵满足下列矩阵不等式,则存在全局动态模糊控制器(2)使得模糊系统(1)鲁棒渐近稳定且满足H∞控制性能。
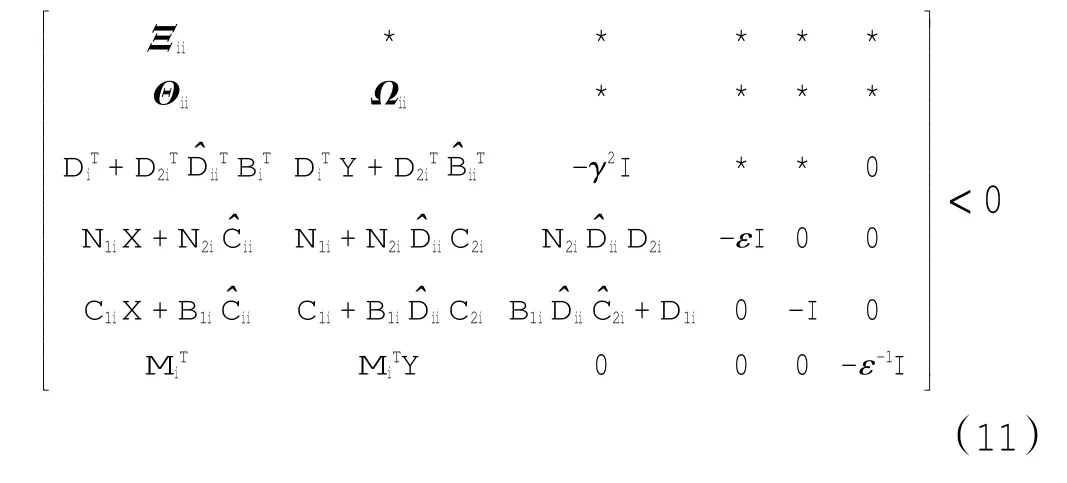

i<j=1,2,3,…,r,*表示相对位置的转置矩阵。其中

更进一步,全局动态模糊输出反馈控制器的待确定参数可以通过下式求得

其中S和M是非奇异矩阵,且满足SMT=I-XY。
证明取Lyapunov函数V(ξ(t))=ξT(t)Pξ(t),先对矩阵P和P-1进行如下分块
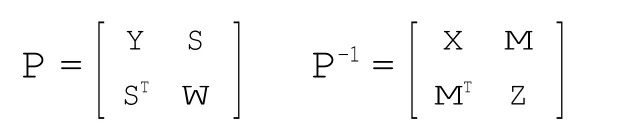
其中:X,Y是对称矩阵。由PP-1=I易得更进一步可得
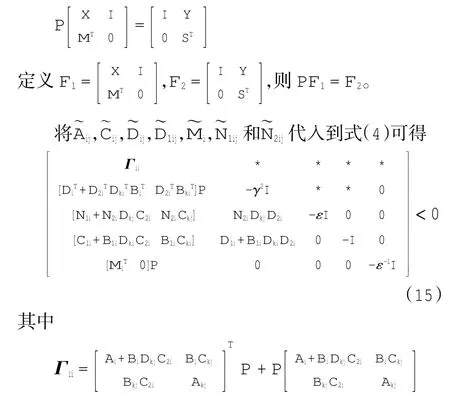
对式(11)左右分别乘diag[F1-T,I,I,I,I]和diag [F1-1,I,I,I,I]可得式(15)。
因为下列矩阵运算
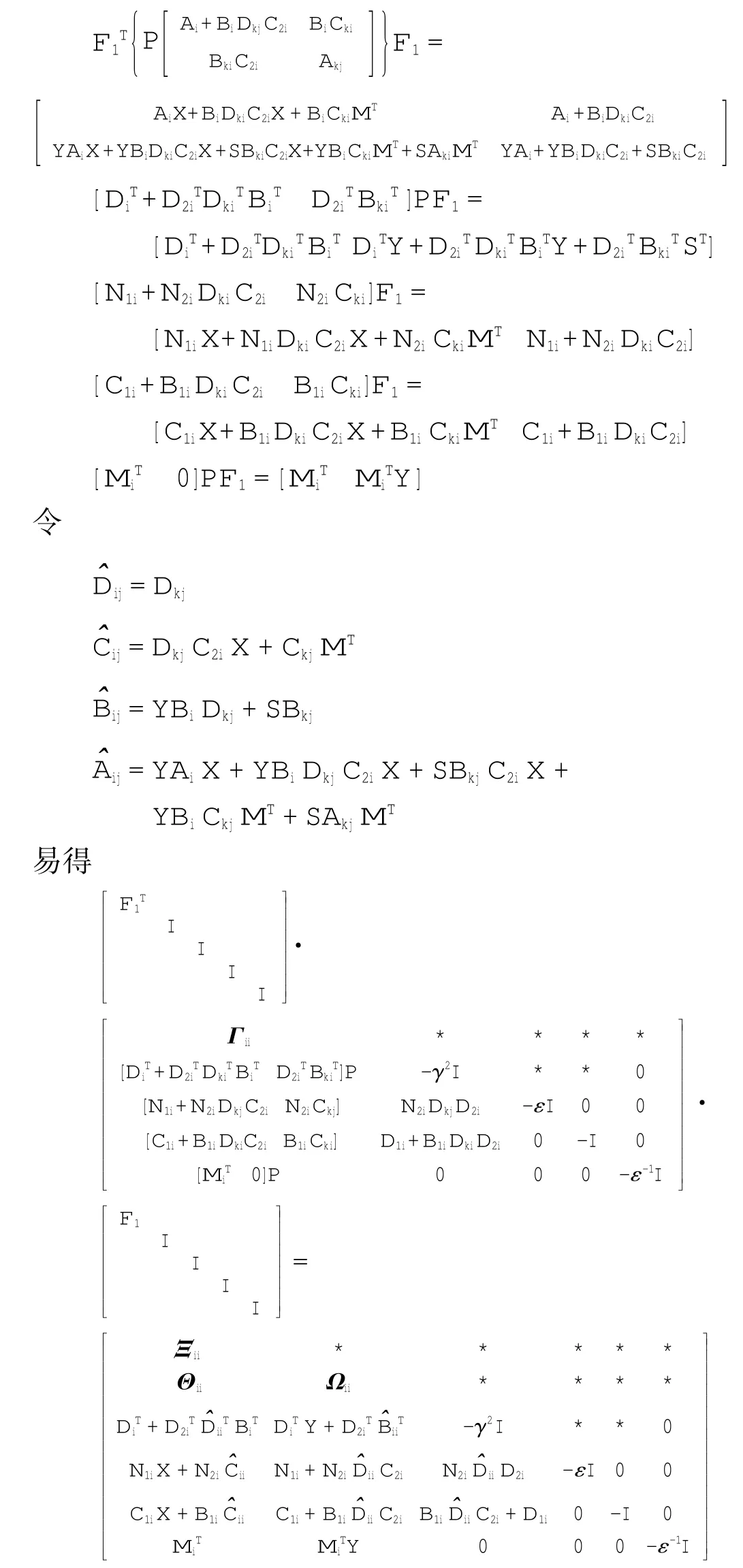
由式(11)可得定理1中的式(4)成立。同理式(5)也成立。由定理1可得定理2成立。
3 数值算例
考虑不确定非线性模糊系统(1)取参数如下

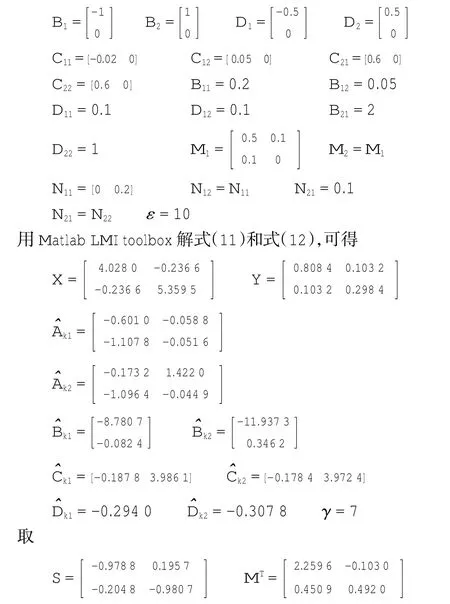
根据式(13)和式(14),可以很容易得到动态输出控制器的待定矩阵

4 结语
本文在设计全局动态输出反馈控制器的基础上研究了系统的稳定性,并在加入了外界干扰后,考虑了系统的H∞性能控制。通过运用矩阵的非奇异矩阵分解,将给定的充分条件转化成线性矩阵不等式,使得系统在稳定的同时满足H∞性能控制。对于状态不可测的模糊系统,更适合运用动态输出反馈控制器,新得到的结论使得不确定模糊系统的稳定性更具有鲁棒性。最后的数值算例验证了方法的可行性。不足之处在于矩阵的非奇异分解要求相对高一些,因此对被控输入有了一定的限制,今后应在广泛应用方面进行进一步的研究。
[1]苏成利,王树青.一类不确定模糊模型的输出反馈鲁棒预测控制[J].控制理论与应用,2006,23(5):768-772.
[2]李 丽,巩长忠.不确定模糊系统的输出反馈控制[J].辽宁工学院学报,2005,25(1):17-22.
[3]何率天,达飞鹏,柴春红,等.模糊时滞系统的输出反馈控制器设计[J].模糊系统与数学,2007,2l(4):74-79.
[4]XU SHENGYUAN,LAM JAMES.Robust H∞control for uncertain discrete-time-delay fuzzy systems via output feedback controllers[J].IEEE Transactions on Fuzzy Systems,2005,13(1):82-93.
[5]钱 伟,沈国江,孙优贤.基于LMI的分布时滞系统输出动态反馈镇定[J].控制理论与应用,2009,26(4):446-450.
[6]陈武华,唐友建,王俊歌,等.不确定脉冲系统的动态输出反馈H∞控制[J].控制理论与应用,2009,26(2):145-150.
[7]佟绍成,王 涛,王艳平,等.模糊系统的设计及稳定性分析[M].北京:科学出版社,2004:269-302.
[8]GAO Y Y,SUN Y X,LAM J.Delay-dependent robust H∞control for uncertain systems with time-varying delay[J].IEEE Proc Control Theory Appl,1998,145(3):338-344.
(责任编辑:杨媛媛)
Robust H∞control for uncertain fuzzy systems via dynamic output feedback controller
ZHAO Yun
(Facility Division,CAUC,Tianjin 300300,China)
The problem of robust H∞control for a class of T-S uncertain fuzzy systems has been studied,as well as the sufficient conditions,which maintain the robust H∞control of the whole fuzzy systems based on the full order fuzzy dynamic output feedback controller.On this basis,the matrix is divided into two nonsingular matrices,and the sufficient condition is transformed into linear matrix inequalities(LMIs),in order to solve the question by software Matlab.What's more,the matrices of dynamic output feedback controller,which are to be determined,can be obtained by the relationship of matrices in sufficient conditions.The full order fuzzy dynamic output feedback controller is used to study the problem of stability for fuzzy uncertain systems,and the robust fuzzy H∞control problem is also discussed.Furthermore the final numerical example is included to show the effectiveness of the proposed method.
uncertain system;dynamic output feedback controller;linear matrix inequalities;H∞performance indicators
TP13
:A
:1674-5590(2014)01-0051-06
2012-09-22;
:2012-11-22
赵 云(1985—),女,河北邢台人,实习研究员,硕士,研究方向为模糊控制.