基于分布式交互仿真平台的网络鱼雷协同作战仿真系统
2014-02-28倪文玺邹启明
倪文玺, 邹启明, 郑 为, 吕 维
基于分布式交互仿真平台的网络鱼雷协同作战仿真系统
倪文玺, 邹启明, 郑 为, 吕 维
(中国船舶重工集团公司 第705研究所, 陕西 西安, 710075)
通过分析网络鱼雷协同工作原理, 建立了水下网络组网拓扑结构模型和网络鱼雷协同作战仿真模型, 并基于分布式交互平台构建了网络鱼雷协同仿真系统, 设计了不同态势作战想定, 实现了网络鱼雷协同作战仿真。仿真结果表明, 基于分布式交互仿真平台的网络鱼雷协同作战仿真系统是可行的。
网络鱼雷; 协同作战仿真; 分布式交互仿真
0 引言
传统的鱼雷武器已无法满足海军中远海作战、信息化作战的要求, 利用水下网络的信息优势, 形成“网络中心战”协同作战能力, 已经成为水下战的发展趋势。根据水下网络中心战的作战理念, 网络鱼雷作为一个水下移动探测平台和进攻武器, 可由水下作战平台、水面舰艇或飞机等多种平台发射, 也可布放在岸基或海底固定平台, 可在水下、海面、陆地甚至空中和太空随时对其进行操控, 对敌方目标进行侦测、识别、跟踪和攻击。依托水下网络, 可实现海(水面)、陆、空、天、潜(水下)5D立体化网络化协同作战, 进行超远程精确打击, 从而提高整体作战效能[1]。
本文首先描述了网络鱼雷协同作战原理, 构建了一个典型的水下网络拓扑结构; 其次, 建立网络鱼雷协同作战仿真模型, 并基于分布交互仿真平台构建网络鱼雷协同作战仿真系统; 最后, 实现了不同作战想定条件下的网络鱼雷协同作战仿真。
1 网络鱼雷协同作战原理及组网结构
1.1 网络鱼雷协同作战原理
网络鱼雷协同作战原理如图1所示。
图1 网络鱼雷协同作战原理
当移动节点为网络鱼雷时, 网络鱼雷一般有以下3种状态, 其工作原理如下。
1) 平台内待命状态
网络鱼雷是通过平台发控系统获取目标信息和水下组网信息, 发射入水后, 接入网络中心战组网, 不断获取已更新的目标信息和协同网络鱼雷信息[2]。
2) 网络鱼雷处于水面悬浮状态, 且尚未接入网络中心战组网
岸基指挥中心解算获得目标信息后, 通过无线链路发送目标信息、水下组网信息给网络鱼雷, 通知网络鱼雷接入网络中心战组网, 不断获取已更新的目标信息和协同网络鱼雷信息。
3) 网络鱼雷在网络中心战组网外巡航, 且已接入网络中心战组网/处于网络中心战组网内
岸基指挥中心解算获得目标信息后, 通过无线链路发送目标信息给网关节点, 再由网关节点发送给距离网络鱼雷最近点固定节点, 通过水声链路发送目标信息、协同信息给网络鱼雷。
1.2 水下网络拓扑结构
水下网络一般由岸基指控中心、网关节点、固定节点以及移动节点组成, 是一种典型的传感器网络。水下网络通过水声通信链路将固定节点、移动节点和网关节点连接成水声网络; 通过无线通信链路将网关节点和岸基指控中心连成无线网络[3]。
水下网络拓扑结构如图2所示。所设计的水下网络覆盖通信范围为50×50 km, 分布深度为50~300 m。包括1个岸基指控中心、2个网关节点和12个水下节点。
图2 水下网络拓扑结构图
2 网络鱼雷协同作战仿真模型
基于网络鱼雷协同作战原理的概述, 以及典型的水下网络拓扑结构的构建, 根据水下网络中心战所负担的作战使命, 将网络鱼雷协同作战划分为低速巡航、中程跟踪和末程攻击3个阶段。
1) 低速巡航阶段
该阶段时, 目标距离网络鱼雷≥50 km。多发鱼雷联网, 处于搜索、探测目标或处于平台内待命状态, 以4~6 kn的速度进行低速巡航, 巡航期间周期性进行水面悬浮, 与飞机或卫星进行无线链接。当水下网络检测到目标时, 岸基指控中心通过天基向网络鱼雷传送目标信息, 并发出攻击指令, 网络鱼雷在接到攻击指令后, 完成敌方态势的更新及攻击准备, 并转入中程跟踪阶段。
2) 接入水下网络中程跟踪阶段
当网络鱼雷转入中程跟踪阶段时, 网络鱼雷已接入水下网络, 目标距离网络鱼雷<50 km且>5 km。网络鱼雷以10~15 kn的巡航速度向目标靠近, 并通过水下网络与岸基指控中心进行实时通信, 依靠惯性导航和水声链路相结合的组合导航方法及时修正接近目标的航线, 当目标进入网络鱼雷的水声探测距离时, 网络鱼雷转入末程协同攻击阶段。
当进入中程跟踪实施阶段, 主要是确定网络鱼雷的搜索主航向, 并根据对信息获取能力的不同, 将网络鱼雷搜索方法分为以下2种。
a. 已知来袭目标航向、距离、航速和方位时的搜索方法

图3 形心法求解有利提前角
此时, 网络鱼雷的射击提前角可以参考声自导鱼雷射击有利提前角的求解方法进行求解。考虑到网络鱼雷作战注重快速性, 射击提前角的求解采用形心法求有利提前角
b. 已知来袭目标方位和距离或仅知方位时的搜索方法
多数情况下水下网络能检测来袭目标的方位和距离, 不能提供来袭目标准确的航行方向和航速等参数[4]。在仅仅知道来袭目标方位和距离的条件下, 如何确定攻击方向才能有较高的命中概率是网络鱼雷作战时要解决的关键问题。
图4 网络鱼雷对抗来袭目标阵位关系


3) 网络鱼雷末程协同攻击阶段
当网络鱼雷进入末程协同攻击阶段时, 雷目距离大约在5 km范围内, 为了提高自导搜索面积, 由多个网络鱼雷组成平行航向复合自导搜索扇面, 扩大自导搜索宽度[5]。当有1条网络鱼雷检测到目标时, 启动高速动力系统, 对目标以大于40 kn的速度进行高速攻击, 同时呼叫后续鱼雷进入发现目标的有效航道, 或通过简单的数据链对其他鱼雷进行攻击目标指示。


展开航程

图5 网络鱼雷平行航向搜索示意图
3 网络鱼雷协同作战仿真系统
3.1 系统组成
网络鱼雷协同作战仿真系统由固定节点、网关节点、岸基指挥中心、网络鱼雷T1、网络鱼雷T2和目标等联邦模型组成。其系统构成框图如图6所示。
3.2 系统信息交互
网络鱼雷协同作战仿真系统模块间信息交互框图如图7所示。
下面对各模块及模块间的信息交互情况进行分别介绍。
1) 网络中心战组网信息模块: 网络中心战组网信息模块主要用于实现目标探测、目标要素精确解算及网络鱼雷的调度[6]。包括3个子模块: 固定节点子模块、网关节点子模块和岸基指挥中心子模块。
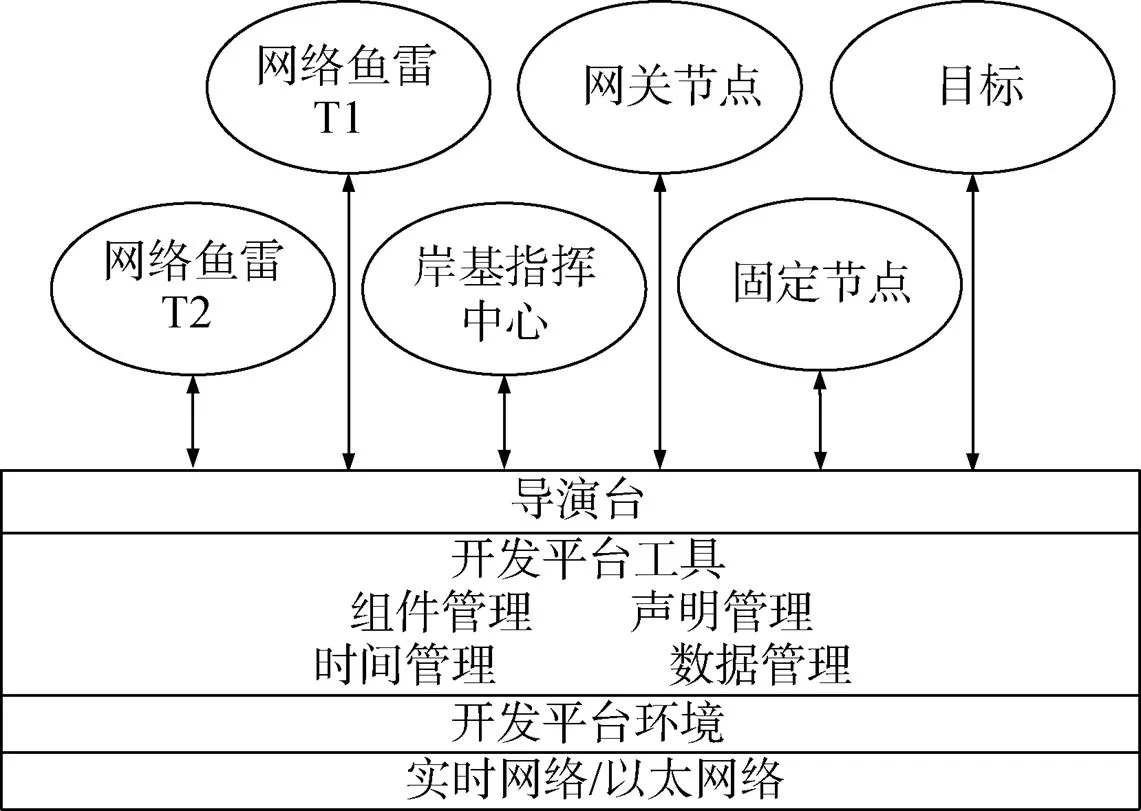
图6 网络鱼雷协同作战仿真平台组成图

图7 网络鱼雷协同作战仿真平台模块组成图
2) 目标模块: 目标模块主要实现目标运动模拟、目标辐射噪声和目标强度。
3) 平台模块: 平台模块主要应用于网络鱼雷尚未发射的状态下, 此时由平台模块接收目标要素信息, 对网络鱼雷实施布放。其功能为运动、无线通信, 射击诸元解算和装订。
当平台发射指令发出后, 待命状态的网络鱼雷开始解算。网络鱼雷模块主要功能包括: 运动和控制功能、弹道逻辑功能、自导检测功能、水声通信功能、无线通信功能和数据处理功能。
3.3 作战想定
作战态势的想定如图8所示。仿真想定内容如下:


图8 试验态势想定

3) 网络中心战组网作战反应时间30 s;
4) 岸基指挥中心发射2条网络鱼雷, 发射时刻网络鱼雷可以得到目标的方位、距离(具有一定的解算精度);
5) 网络鱼雷入水后, 雷目距离5~50 km时, 接入网络中心战组网中, 接收组网目标信息, 网络鱼雷以10~15 kn的巡航速度向目标靠近;
6) 当雷目距离≤5 km范围时, 网络鱼雷按照网络鱼雷中程跟踪模型, 组成复合自导搜索扇面, 实现对目标的协同检测、跟踪, 目标确认后, 变高速(40 kn)对目标进行高速打击。
3.4 系统仿真流程
整个仿真过程中涉及的事件包括: 目标信息传递、目标信息确认和网络鱼雷协同。
规划网络鱼雷作战仿真过程设计如下:
1) 运行仿真导演台, 设置相应的仿真态势(包括网络中心战组网位置、岸基指挥中心位置、目标与鱼雷敌我初始阵位及运动方式等), 创建联邦;
2) 联邦成员(目标、固定节点、网关节点、岸基指挥中心、网络鱼雷T1和网络鱼雷T2)运行, 申请加入联邦;
3) 仿真开始, 随着仿真步长的推进, 每仿真步长执行以下步骤:
a. 目标运动;
b. 网络鱼雷巡航, 悬浮时接收岸基指挥中心目标信息, 下潜时接收固定节点/网关目标信息;
c. 固定节点完成目标探测、目标状态估计, 数据上报同时进行数据接收(数据可能来自网关节点, 可能来自其他固定节点);
d. 网关节点接收固定节点回报信息, 发送给岸基指挥中心, 同时接收岸基指挥中心的目标信息, 发送给固定节点;
e. 岸基指挥中心完成数据接收、数据融合、目标信息解算及数据发送。
4) 每仿真步长各联邦成员更新数据到仿真导演台, 进行态势的显示。
3.5 系统仿真结果
根据试验态势想定, 布置各节点及网络鱼雷的坐标信息。仿真开始时在程序中设定试验想定的初始变量, 设定完成后加载试验态势, 仿真运行的初始态势如图9所示, 网络鱼雷作战过程深度变化如图10所示。
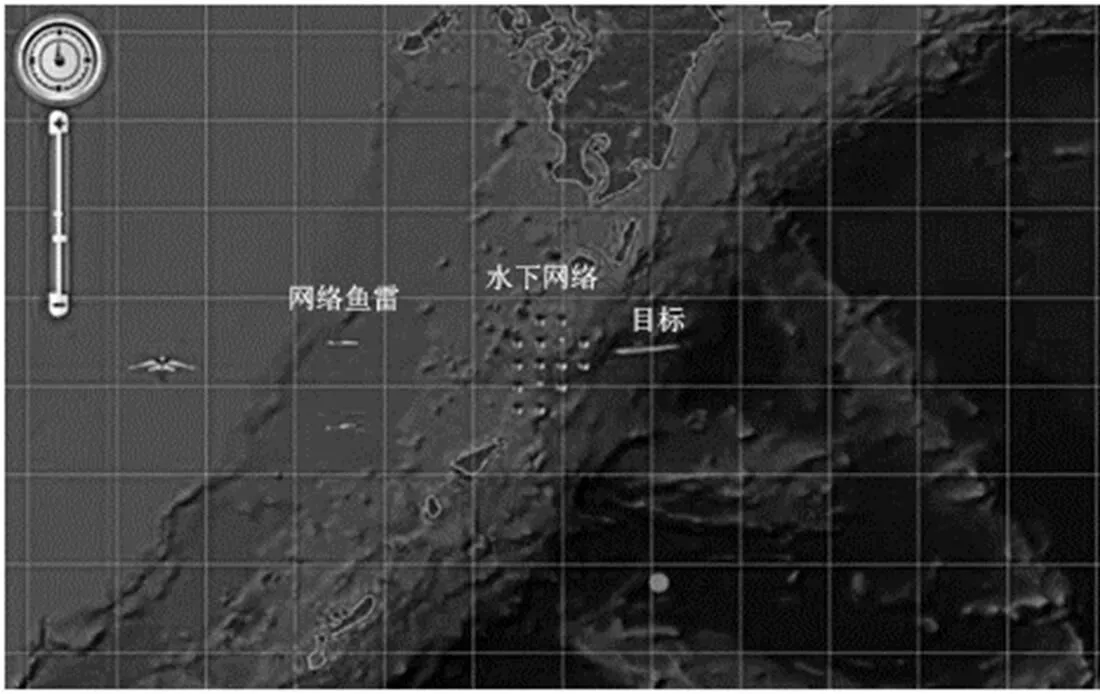
图9 网络鱼雷协同作战过程
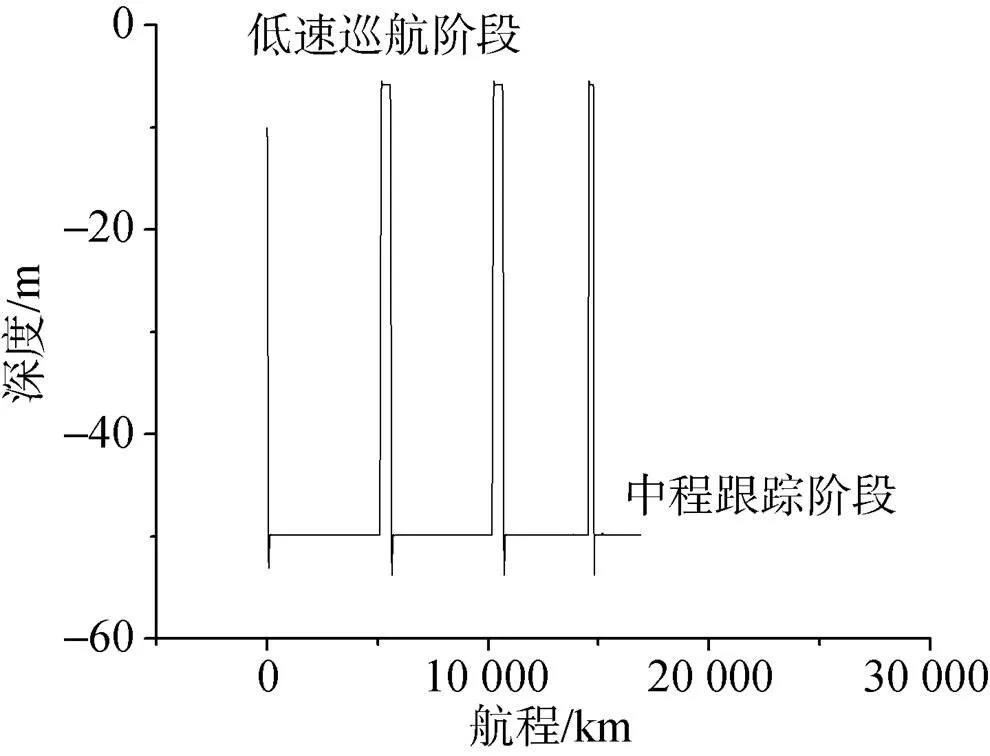
图10 网络鱼雷协同作战过程深度变化
在仿真试验运行中, 网络鱼雷按照协同作战过程进行, 当网络鱼雷处于水下网络覆盖范围之外时, 进行低速巡航, 并周期上浮接收目标信息; 当掌握目标态势信息后, 网络鱼雷完成攻击准备, 转入中程跟踪阶段, 并利用水下网络跟踪目标; 当雷目距离小于2.5 km时, 网络鱼雷通过鱼雷自导系统模型检测到来袭目标, 并高速命中目标, 同时另一条网络鱼雷也检测到目标并进入末程攻击阶段。试验结果表明, 整个仿真平台可以满足网络鱼雷协同作战仿真研究的主要内容, 并能够进一步开展网络鱼雷及水下中心战的仿真需求。
4 结束语
网络鱼雷水下协同作战研究目前尚处起步阶段, 通过对网络鱼雷战技指标和功能的假设, 构建网络鱼雷协同作战仿真模型, 并开发了网络鱼雷协同作战仿真系统, 该系统可以满足网络鱼雷协同仿真需求。本文所构建的网络鱼雷协同仿真方法, 可为今后开展潜伏式网络鱼雷和多雷进入航路规划技术、快速接入声通信网络作战方法仿真研究以及网络鱼雷动态组网与协同作战多目标攻击仿真方法研究提供一定理论参考。
[1] 淦华东, 冀邦杰, 周德善, 等. 网络鱼雷概念及关键技术探讨[J]. 鱼雷技术, 2008, 16(4): 5-8.Gan Hua-dong, Ji Bang-jie, Zhou De-shan, et al. Discussion on Concept and Key Technologies of Network-Tor- pedo[J]. Torpedo Technology, 2008, 16(4): 5-8.
[2] 佟盛, 张信学. 美军水下网络中心战技术发展及设想[J]. 舰船科学技术, 2009, 31(2): 154-158. Tong Sheng, Zhang Xin-xue. The Technological Development and Imagine of US Navy Underwater Network Centric Warfare[J]. Ship Science and Technology, 2009, 31(2): 154-158.
[3] Rice J, Green D. Underwater Acoustic Communications and Networks for the US Navy′s Seaweb Program[C]// Proceedings of the 2nd International Conference on Sensor Technologies and Applications (SENSORCOMM 2008). Esterel: IEEE Press, 2008: 715-722.
[4] 丁振东. 鱼雷作战使用有关问题研究[J]. 舰船电子工程, 2011, 31(11): 19-21.Ding Zhen-dong. Research on Problems of Torpedo Operation Employment[J]. Ship Electronic Engineering, 2011, 31(11): 19-21.
[5] 张静远. 鱼雷作战效能分析[M]. 北京: 国防工业出版社, 2003.
[6] 王君. 支持水下网络中心战的信息系统探讨[J]. 指挥信息系统与技术, 2010, 1(5): 6-8.Wang Jun. Investigation into Underwater Net-Centric Warfare Information Systems[J]. Command Information System&Technology, 2010, 1(5): 6-8.
(责任编辑: 许 妍)
Cooperative Operation Simulation System of Network Torpedo Based on Distributed Interactive Simulation Platform
NI Wen-xiZOU Qi-mingZHENG WeiLÜ Wei
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China)
According to the principle of cooperative operation of a network torpedo, an underwater network topology model and a cooperative operation simulation model of the network torpedo are established. Further, a cooperative operation simulation system is constructed based on the distributed interactive simulation platform. Many operational scenarios are designed to realize cooperative operation simulation of the network torpedo. Simulation results show that the proposed cooperative operation simulation system of the network torpedo is feasible.
network torpedo; cooperative operation simulation; distributed interactive simulation
TJ630; TP391.9
A
1673-1948(2014)06-0473-06
2014-09-04;
2014-09-28.
倪文玺(1986-), 男, 硕士, 工程师, 主要研究方向为数学仿真.
