一种尺度目标模拟器的模拟逼真度分析
2014-02-28陈建青赵俊杰
陈建青, 赵俊杰
一种尺度目标模拟器的模拟逼真度分析
陈建青, 赵俊杰
(昆明船舶设备研究试验中心, 云南 昆明, 650051)
从潜艇回波特性研究一般性结论和鱼雷常用目标识别方法入手, 以一种单收多发尺度目标模拟器为例,分析了尺度目标模拟器的工程模型及工程实现中的关键参数, 仿真结果表明, 该模拟器在多亮点结构回波的多普勒频移模拟、时延模拟和目标强度模拟等方面都存在一定的不足, 还有较大的提升空间, 该研究为尺度目标模拟技术的进一步优化提供了参考。
尺度目标模拟; 多普勒频移; 时延; 目标强度
0 引言
随着鱼雷自导技术的发展, 声自导鱼雷的尺度识别能力已经成为鱼雷捕获、跟踪目标的基本条件。
当今, 多国海军已将尺度目标识别技术应用于现役或在研鱼雷中, 我国新型鱼雷的尺度目标识别技术也日臻成熟。相应地, 在水声对抗、部队训练、鱼雷试验等领域需要大量应用尺度目标模拟设备, 因此提高尺度目标模拟的逼真度是该技术领域重要发展方向之一。
由于尺度目标模拟器与真实潜艇在物理本质上的不同, 模拟回波与真实潜艇回波总是存在着差异。例如, 潜艇对声波的反射是由无数点组成的, 其中包含着丰富的相位信息, 而声学模拟器的回波由有限个单点发出, 如果它的发射波形是入射波形的简单拷贝, 那么回波所携带的信息与真实回波相比必然存在较大差异。
本文从潜艇目标特性研究的一般性结论入手, 结合几种鱼雷自导常用的尺度目标识别技术, 分析了目标回波中最可能被鱼雷利用的信息, 针对尺度目标模拟器工程模型和具体实现技术, 讨论了单收多发线列阵尺度目标模拟器与真实目标回波的差异。
1 潜艇目标特性及鱼雷识别方法
1.1 潜艇目标散射特性
潜艇目标具有复杂的外形和内部结构, 它的反射回波是内外结构各个部位对入射声波散射的总体贡献。据研究, 按潜艇回波产生的物理机理, 回波可分为几何镜反射、棱角散射、多层结构散射、弹性波散射和尾流兴波散射, 前3种反射波贡献较大, 构成了回波的主要成分。
潜艇上很多部位都会产生几何镜反射, 如艇体、舰桥、尾舵和尾翼等。几何镜反射在很大的舷角范围内对回波有着主要贡献, 属于潜艇回波的确定性部分。镜反射中心在潜艇上不是一个固定的点, 而是随着入射声线方位不同而滑动的。
棱角散射是由水中目标在几何形状上的棱角、线状间断或边缘产生的。当棱线与波束相垂直, 且棱长超过波长时, 棱的反向散射是很强的。一般情况下, 棱角散射亮点没有几何镜反射亮点强, 但是大量的棱角产生的反射也可以形成不可忽视的回波。更重要的是棱角散射回波的形状和尺度大致与目标的几何形状及尺度相同, 可用于目标的分类和识别, 也可用于要害部位识别。潜艇上许多部位可产生棱角散射, 如螺旋桨的棱边, 艇体上排水孔的四边, 艇上的扶手、辅助装置等。
当入射声波透过船壳进入舱室, 在舱内多次反射后, 再次透过船壳形成的回波是多层结构散射, 据研究, 只有在某些特殊的投射角情况下, 多层结构散射才可能产生突出的亮点, 且亮点强度可显著大于其他散射造成的亮点背景, 这类亮点的回波波形具有逐渐增强的包络和显著的时延扩展。潜艇沿横向排列有加强肋, 沿纵向排列有隔板, 它们所形成的角反射器, 会对潜艇的回声产生很重要的贡献, 而且具有较宽的指向性。
据实艇试验、模型测试和相关研究表明, 在高频情况下, 潜艇可以看作由许多个单元反射体组成, 潜艇总的回声是这些单元反射体散射的合成。借鉴雷达散射分析的结论和经验, 潜艇上的这些单元散射体的局部散射行为可以等效为若干点源的散射, 潜艇声回波模拟的工程模型就是建立在此基础上的。
1.2 声自导鱼雷目标识别技术
随着数字化技术的发展, 鱼雷识别尺度目标的新技术新方法不断出现, 国内鱼雷的尺度目标识别能力已从1D线尺度发展到2D面尺度识别。本文讨论鱼雷常采用的2种目标识别方法: 1) 基于有效目标尺度的方位走向识别法[1-2]; 2) 基于脉宽延展特性与多普勒效应的目标识别方法[3]。
基于有效目标尺度的方位走向识别方法是最有效的尺度识别方法之一, 它基于尺度目标的距离-方位延展特性, 将一帧回波信号分为个子帧, 对各帧信号采用等效二基元分裂波束测向原理, 估计目标每一个被分割部位的方位角, 总共可得个方位角数据, 利用这些数据求出目标方位走向, 从而判断目标是体目标还是点目标[1, 4]。
潜艇回波是各个亮点子回波的相干叠加, 由于潜艇的尺度和复杂结构, 造成其回波具有脉宽延伸特性、多普勒效应、包络起伏效应, 各回波的多普勒频移有微小差异, 整个回波的包络和相位起伏较大, 自导系统检测回波的相位谱、相位差及频率等参数, 当相位谱、频率谱宽大于一定域值时可判为体目标, 否则判定为点目标。
此外, 声自导鱼雷采用的目标识别技术还有基于多散射中心理论的利用目标反射亮点区分目标方法、对目标信号进行谱分析处理将结果与库存目标谱进行对比区分目标方法、对回波进行变换后求其特征值后进行分类和识别方法等等。
从上述方法可看出, 目前鱼雷对目标尺度的识别主要是定性判断, 在识别中主要利用了潜艇回波的方位、相位、频率等信息。尺度目标模拟器要逼真地模拟潜艇目标, 应具备足够大的与实艇相当的物理尺寸, 有足够多的回波发射点, 还应具备相位、包络、时延及多普勒频移等参数的准确模拟能力。
2 尺度目标模拟器实现
2.1 尺度目标模拟器工程模型
电声式尺度目标模拟器在国内外广泛应用, 技术已较成熟。模拟器通过悬吊或拖曳等方式,将多个收发换能器按一定尺度的线状或面状布放, 换能器之间相对位置固定, 分别模拟潜艇的不同部位, 能较好地模拟潜艇的多亮点结构回波。结合潜艇回波特性和尺度目标模拟器的实现方法, 尺度目标模拟器多亮点结构反射回波()的工程模型可表示为
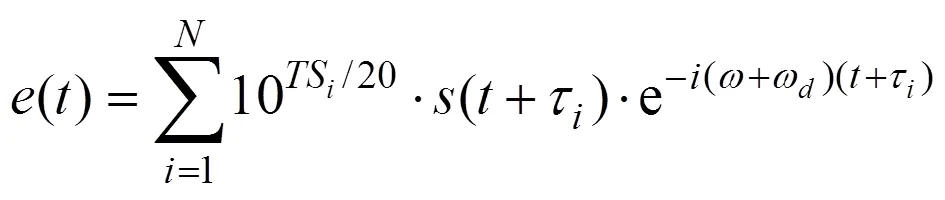

式(1)的工程模型包含了潜艇目标散射特性的研究所得出的潜艇回波关键参数: 各亮点的目标强度、亮点位置、回波频率、回波相位、脉宽延展及包络起伏特性。
模型中参数在工程实现中对应着不同实现方法, 与模拟逼真度有关的主要有以下几方面。1) 目标亮点数: 潜艇作为复杂结构的体目标, 对自导探测信号的回波是由无数个强弱不等的点反射叠加而成的, 模拟器发射换能器越多, 产生的模拟效果越真实, 在工程中发射换能器数量受各方面条件的限制, 一般在10个以下。法国ECA公司的STAR拖曳靶有15个收发亮点, 是现有资料中亮点模拟个数最多的目标模拟器。2) 目标强度: 尺度目标模拟器一般具有分别设定各亮点目标强度的功能, 设定方法可采用固定或可变方式。3) 时延: 由于模拟器收发换能器的空间位置, 会自然产生不同的回波时延, 模拟器也可以人工设定亮点间时延。4) 多普勒频移: 对于固定式尺度目标模拟器, 多普勒频移模拟完全由电子设备产生, 对于活动式模拟器, 多普勒频移既可由运动产生, 也可由电子设备产生。
结合对潜艇目标散射特性的研究结果, 可看出用有限个发射单元的模拟器对潜艇的模拟逼真度是有限的, 为了提高模拟逼真度, 需要不断改进工程基阵物理结构和模拟模型, 才能应对飞速发展的鱼雷自导识别技术。下面以一种单收多发模拟器为例, 分析对比了模拟器与真实目标之间在多普勒、时延及目标强度模拟方面的差距。
2.2 单收多发尺度目标模拟器
尺度目标模拟器有多种结构形式, 图1是一种典型的单收多发模拟器, 模拟器由5个发射换能器和1个接收换能器组成, 呈直线形布放, 用5个发射换能器分别模拟艇艏、前部、舰桥、艇后部和艉部亮点。为保障收发隔离度使接收换能器远离发射换能器, 这种增加收发换能器间距的方法有效地解决了目标模拟器收发隔离的问题, 在工程应用中证明是一种稳定可靠的方式。
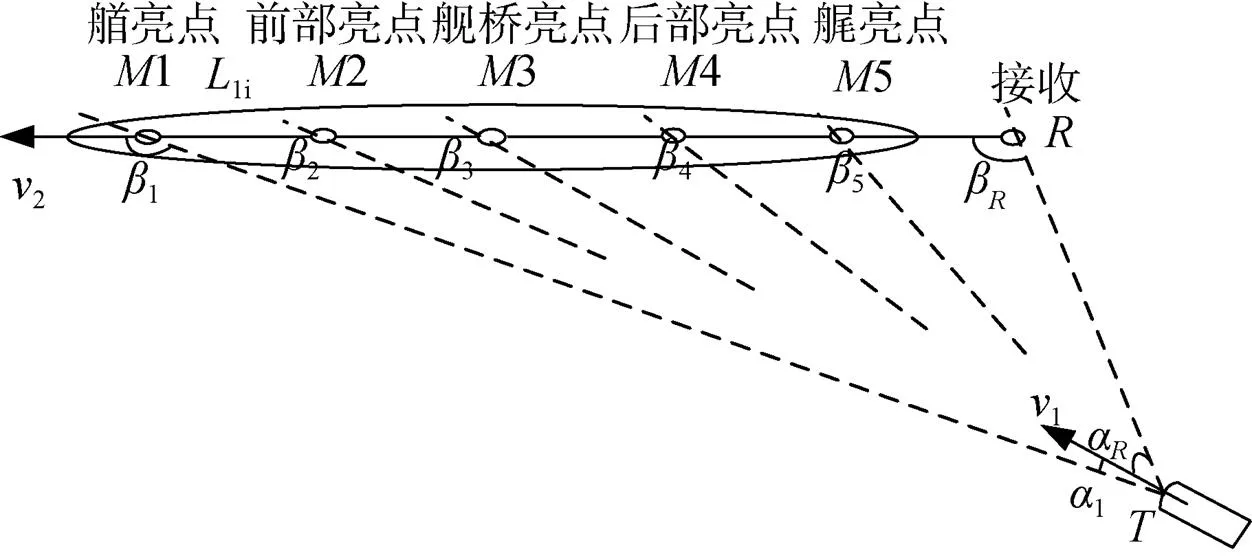
图1 模拟器结构示意图
单收多发模拟器采用如图2所示的信号处理流程。接收换能器收到的信号经过频率均衡处理后, 作为回波样本传输到各个发射通道, 不同的发射通道在CPU控制下对回波样本进行时延和发射强度处理, 由各发射换能器产生模拟潜艇不同部位的亮点回波。因为只有一个接收换能器, 所以模拟器无法判断鱼雷的攻击方位, 不能根据鱼雷攻击方位产生回波展宽、亮点间时延、目标强度等信息。因模拟器具有一定运动速度, 所以对回波信号频率不作处理, 回波的多普勒效应由模拟器运动自然产生。

图2 模拟器信号处理流程图
这种线列阵结构简单、可靠, 但它在模拟效果上与实艇是有差别的, 下面具体分析该模拟器产生回波与真实回波在各亮点多普勒频移、亮点时延等方面的区别。
3 单收多发尺度模拟器回波差异分析
3.1 多普勒模拟差别
当鱼雷处于潜艇的中、近场, 鱼雷探测信号以大扇面覆盖潜艇, 潜艇不同部位产生的回波多普勒与各反射点的角度有关。设潜艇产生若干个亮点, 其中第个亮点的回波频率

按图2所示的单收多发模拟器信号处理流程, 模拟器对回波的频率不作处理, 模拟器所产生的多普勒频移由两者的相对运动自然产生, 因为模拟器的信号接收点位置与实际真实潜艇的反射情况不同, 鱼雷收到模拟器所产生的亮点的频率

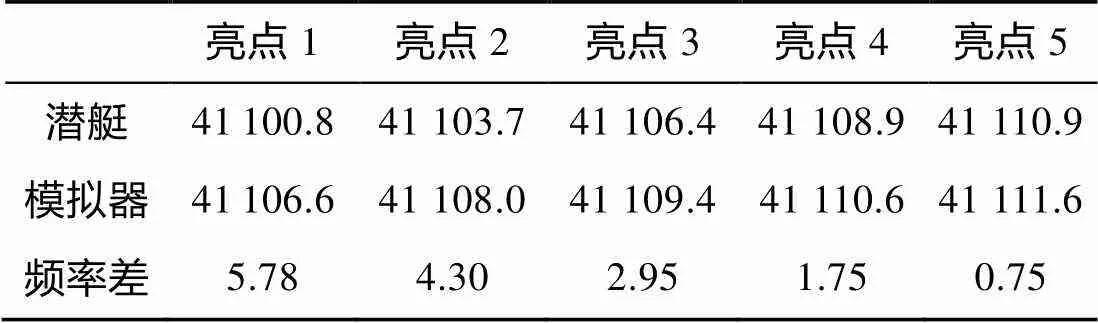
表1 鱼雷攻击目标模拟器和潜艇的频率差异
根据式(2)和式(3)可知, 因各亮点回波频率与声波的入射、反射角度均有关, 而单收多发模拟器因接收点与发射点的分离必然会造成亮点回波频率失真, 从表1的单收多发线列阵亮点回波频率与真实潜艇回波频率差可看出, 发射换能器位置与接收换能器相距越远, 该亮点回波与真实回波的频率差越大。
当鱼雷从正横方向攻击模拟器时, 模拟器各亮点回波频率误差最小, 鱼雷从模拟器头尾攻击时, 回波多普勒频移与真实情况偏差最大。
3.2 时延模拟差别
在鱼雷探测信号照射到潜艇并由潜艇产生回波的过程中, 鱼雷收到各亮点的时延由两部分组成, 一部分是声波从鱼雷到达潜艇不同部位的时延, 另一部分是由潜艇不同部位产生的反射波到达鱼雷的时延。鱼雷攻击潜艇时所收到的各亮点间时延为

对于图1所示的单收多发模拟器, 其自然产生的亮点间时延只与声波产生位置到鱼雷的距离有关, 声波从鱼雷到达模拟器的时延因为模拟器只有一个接收换能器而消除了。
假如目标模拟器对时延不作任何处理, 则鱼雷在攻击单收多发模拟器时所产生的亮点间时延参数
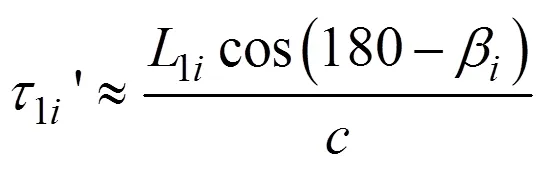
假设图1中各亮点间距离为20 m, 鱼雷距艏亮点距离1=500 m, 表2是鱼雷不同舷角下攻击真实潜艇和单收多发目标模拟器的亮点间时延差异, 单位ms。
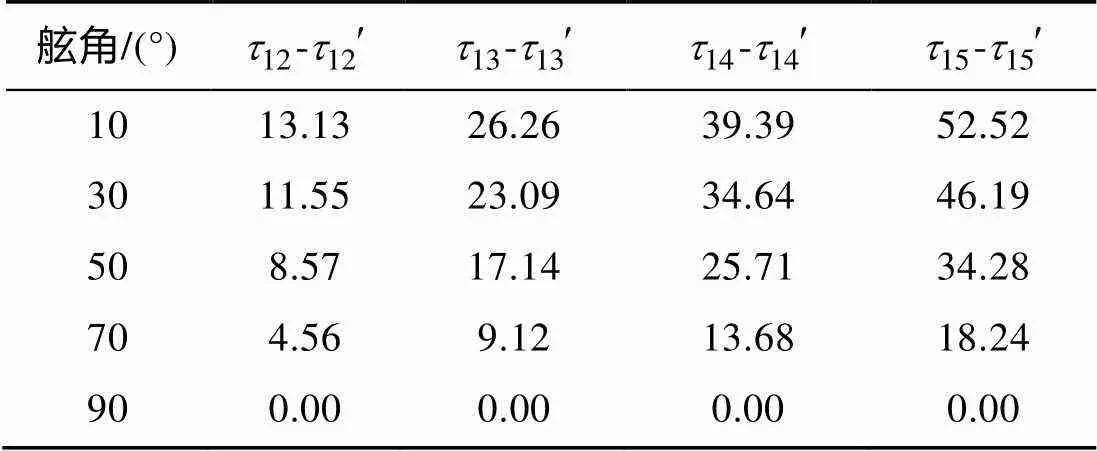
表2 不同舷角下鱼雷攻击目标模拟器和潜艇的时延差异
从表中可以看到, 当鱼雷从艏艉方向攻击模拟器时, 亮点间时延最大, 从正横方向攻击时, 亮点间时延最小。当鱼雷探测脉冲只有5~10 ms宽时, 由于时延误差引起的失真很明显, 尺度目标模拟器回波信号的亮点间时延会对鱼雷的方位走向判别产生较大影响。当鱼雷在中、近程时, 鱼雷的时间-方位分辨能力越强, 模拟器产生的时延误差所带来的影响就越明显。
在图2所示的单收多发模拟器中, 可以通过处理电路人为增加时延, 但是如果模拟器无法测量鱼雷攻击方位, 对时延的模拟只能预先设定固定值, 不能根据鱼雷的攻击舷角实时变化, 造成了回波信号的失真。
3.3 目标强度模拟差别
国外早在第2次世界大战期间, 就开始研究潜艇目标强度, 目前潜艇回波强度的“蝴蝶”形特征和多亮点结构特点已被反复验证。潜艇多亮点回波的目标强度存在一定的规律, 但由于水声环境、潜艇形状以及内部结构的复杂性, 也有较大成都的不确定性, 因而不同潜艇之间存在着很大差异。
根据国内外相关研究成果可知, 潜艇回波的目标强度与鱼雷攻击方位角密切相关, 因此尺度目标模拟器应具备测量鱼雷攻击方位的能力, 能够根据攻击鱼雷方位分别设定各个发射换能器的回波目标强度。更进一步地, 应建立在合理范围内随机变化的目标强度模型, 从而能够更逼真地模拟真实目标的反射特性。本文中的单收多发模拟器因无法测量鱼雷的攻击方位, 按图2所示的信号处理流程可知, 采用目标强度预设定的方法, 其产生的回波与真实潜艇回波存在较大差异。
4 结束语
尺度目标模拟器技术在水声对抗、鱼雷试验与训练领域有着广泛的应用, 模拟器技术应该在潜艇目标特性研究成果的基础上, 不断提高模拟逼真度, 以应对迅速发展的声自导鱼雷尺度目标识别技术。本文分析认为单收多发目标模拟器在多亮点结构回波的多普勒频移模拟、时延模拟和强度模拟等方面都还有较大的提升空间。
[1] 陈春玉. 尺度目标识别中的若干技术问题[J]. 鱼雷技术, 2003, 11(3): 9-13, 37.
[2] 周明, 初磊,朱慧, 等. 一种反潜声自导鱼雷目标尺度识别方法研究[J]. 弹箭与制导学报, 2008, 28(5): 237-240.
Zhou Ming, Chu Lei, Zhu Hui, et al. Study on Target Di- mension Recognition of Anti-submarine Homing Torpedoes[J]. Journal of Projectiles, Rockets, Missiles and Gui- dance, 2008, 28(5): 237-240.
[3] 何心怡, 蒋兴舟. 基于脉宽延伸与多普勒效应的目标识别方法[C]//中国声学学会2001年青年学术会议. 北京, 2001.
[4] 刘晓春, 董春凯. 基于目标空间尺度特征末程识别潜艇和诱饵的方法研究[J]. 鱼雷技术, 2008, 16(5): 46-50.
Liu Xiao-chun, Dong Chun-kai. A Method of Distinguishing Submarine and Acoustic Decoy Based on Features of Target Space Dimension[J]. Torpedo Technology, 2008, 16(5): 46-50.
(责任编辑: 杨力军)
Fidelity Analysis of a Scale Target Simulator
CHEN Jian-QingZHAO Jun-Jie
(Kunming Shipborne Equipment Research & Test Center, Kunming 650051, China)
On the basis of the common conclusion of echo characteristics of a submarine and the general recognition method for a torpedo, we take single-receiving multi-transmitting scale target simulator for example to analyze the engineering model of a scale target simulator and the key parameter in engineering implementation. Simulation results show that this simulator has insufficiencies in Doppler frequency shift, time delay, and target strength of multi-highlight structure echo, which infers a large space for improvement. This study may provide a reference for further optimization of the scale target simulation technology.
scale target simulation; Doppler frequency shift; time delay; target strength
TJ630.34
A
1673-1948(2014)06-0442-05
2014-07-25;
2014-10-30.
陈建青(1968-), 女, 研究员, 主要研究方向为水下目标模拟技术、水下目标定位技术等.
