一种基于时间反转处理的浅海目标监测方法
2014-02-28曲少春王英民
曲少春, 王英民, 郑 琨
一种基于时间反转处理的浅海目标监测方法
曲少春, 王英民, 郑 琨
(西北工业大学 航海学院, 陕西 西安, 710072)
为了实现浅海环境中对入侵目标实时监测和判断的目的, 基于时间反转技术, 提出了一种利用时间反转镜在浅海环境中产生一条警戒线的水下目标监测方法, 首次从理论上分析了入侵目标强度、深度和与时反阵水平距离等因素对基于时反镜的实时监测系统探测敏感度的影响。针对典型浅海声信道, 通过计算机仿真和理论数据计算结果表明, 采用时间反转技术的浅海水下目标监测方法的性能优于传统浅海警戒方法, 该方法适用于探测小型目标或目标散射回波强度小的物体且不受浅海复杂声道及多途效应影响, 具有较强的实用性。
浅海警戒; 时间反转处理; 目标监测
0 引言
沿海安全警戒及浅海水下目标监测在国家海防等研究领域有着重要地位, 是水声技术研究的热点和难点。在浅海或近岸海域, 水声信道多径干扰强烈、信道响应稳定性差, 具有典型的时-空-频域非平稳特性, 使得自适应均衡、波束形成、匹配场处理等许多信号处理方法的性能受到很大限制。时间反转镜(time reversal mirror, TRM)技术具有空间聚焦和时间压缩的性质, 其对多途干扰的有效抑制已得到理论和试验验证[1], 现已成功应用于水声通信和动目标的宽带检测[2-4]等水声领域, 以解决水声中的多途干扰问题。目前, 在浅海警戒及水下目标探测领域主要采用浅海警戒雷达、主动和被动声呐来探测目标。浅海警戒雷达接收的反射信号不仅包含有用信号, 也含有海杂波噪声, 为了探测目标, 通常情况下需要设定足够的检测阀值以保证一定的虚警概率, 但当检测小型目标或目标散射的回波强度小于或等于海杂波的回波强度时, 雷达检测将变得特别困难[5]。
使用主动声呐探测目标主要依靠目标回波, 由于海洋信道是非理想信道, 它会使声束弯曲, 使得声呐发出的信号不能在目标处形成聚焦, 从而降低主动声呐的工作性能[6]。使用被动声呐进行浅海目标探测时, 由于浅海的复杂性, 当强度较小时, 基阵收到的目标信号十分微弱, 导致无法准确探测。使用大孔径基阵, 增大发射声源级或将发射基阵设计成具有足够窄的指向性等方法可提高工作性能, 但在实际应用中均有一定的局限性, 相对于TRM在实际应用上也较复杂[7]。针对这些问题, 利用TRM在浅海环境中产生一条时反声场警戒线的方法可达到对入侵目标的即时预警, 该方法应用简单, 监测能力强, 敏感度高, 可探测到小型或散射回波强度小的目标, 且不受浅海多途效应影响, 极大地提高了对浅海水下入侵目标的探测能力, 达到对浅海的实时警戒。
1 理论基础
1.1 时反处理方法的理论基础
时反空时聚焦是浅海水声信道的重要特性, 波动方程解的时反不变性和收发互易性解释了声场具有时反聚焦特性, 以此特性为基础的时反处理方法在复杂浅海环境下实现信号的空时自适应聚焦, 该方法可避免由于传播介质的不均匀性引起的信号畸变及多途效应的影响, 不需要环境的先验信息。时反处理的核心是TRM。TRM是1个由点源发射信号, 阵接收后再反转发射的声系统, 其由1个发射点源(probe source, PS), 1个收发合置的阵列(source receiver array, SRA)和1个垂直接收阵列(vertical receive array, VRA)构成, 是将SRA接收的信号时间反转后重新发射, 使声能在原声源处聚焦。

根据时反的处理过程, 时反处理后形成的声场可以表示为

将式(1)代入式(2)可得

根据简正波模态函数的正交性, 式(3)化简为

1.2 基于时反处理的浅海警戒方法实现过程
基于时反聚焦的浅海复杂环境预警是指,利用时间反转发射和接收聚焦2个方面的特性来提高对浅海复杂环境的监测, 具体实施流程如下。
首先, 利用目标位置附近的PS发射探测信号, SRA接收到该探测信号后将其时间反转再发射回去, 时反信号被VRA接收, 由此产生的声场会在探测声源PS处实现空间的聚焦。这时若时反阵持续发射已存储的时反信号, 就会在PS处持续实现声场的聚焦, 即在时反接收阵与PS之间形成了一条持续的时反声屏障(acoustic barrier)[9-10], 当有目标进入时反警戒线时, 其产生的散射信号会影响时反信号的后向传播从而使得原时反聚焦点及附近位置的能量分布发生变化, 对时反的聚焦效果产生影响, 由此可以判断是否有目标入侵, 达到了监测预警的目的。
浅海警戒方法实施基本步骤如图1所示: 1) 首先由布放的PS发射信号, 经水声信道传输后, PS发射的信号由收发合置的SRA接收; 2) SRA对接收到的信号进行时反处理后再通过SRA发射出去, 由此产生的声场会在探测声源PS处实现空间和时间的聚焦; SRA持续发射时反后的信号在PS处持续实现声场聚焦, 从而产生PS到VRA之间的警戒线; 3) 加入应答器作为声屏障在SRA和PS之间发射干扰信号, 干扰信号和SRA发射的时反后向传播信号叠加, 两信号具有相同的频率, 最终叠加的信号由VRA接收。

图1 环境参数模型及基本步骤图
2 仿真分析和计算
为了验证该方法的有效性, 本文建立了如图1所示的水声实时监测系统, 并进行了仿真分析。采用一列应答器作为干扰声源来模拟目标入侵, 在默认的浅海波导环境中将应答器置于SRA和PS之间。
2.1 仿真条件和信噪比估计

在未使用时反警戒线的浅海环境下, 对有小目标入侵时产生的声场做初步计算。
采用一列应答器作为干扰声源来模拟该目标体, 系统增益表达式为

将放大倍数为63代入式(7)时, 应答器的系统增益为56 dB。
没有放置应答器时, 根据经验公式[12]信噪比

式中:为声源级;表示阵增益;为传播损失;为噪声级。
将应答器置放在距离引导声源PS 3 km的位置, 这时信噪比

由式(8)和式(9)可得
SNR1–SNR2=–6–(10)
远距离传播

将式(6)代入式(5)中, 由此得到SNR1– SNR2=3 dB。
从计算结果可以看出, 当有目标侵入时, 在复杂的浅海水声环境中检测出信噪比与背景信噪比的平局差值为3 dB的波动信号是非常困难的, 当目标更小时, 其产生的散射场会更小, 对水声环境的影响就会更小, 更难检测出来。
2.2 仿真结果及分析
图2为浅海稳定声场中, 只有PS发射信号, 没有时反处理, 目标入侵前后的2个声场在垂直方向上和水平方向上的比较。通过仿真结果可以看到, 当浅海复杂环境加入声屏障时, 也就是有小目标入侵时,与原浅海稳定声场比较其声场强度变化并不明显, 声场场强分布也未受到显著影响,在垂直方向和水平方向上,加入声屏障的声场强度与原稳定声场强度的平均差值低于5 dB,可以清晰看到, 当有目标侵入稳定浅海声场时, 场强变化非常微弱, 在这种情况下, 对于复杂的浅海环境, 实时发现小于5 dB的场强强度变化并由此判断是否有目标入侵是非常困难的[12]。
图3为浅海稳定声场, 只有PS发射信号时, SRA接收信号进行时反处理并重新发射, 未加入声屏障模拟有小目标存在和加入声屏障后的2个声场在垂直方向上和水平方向上的比较。
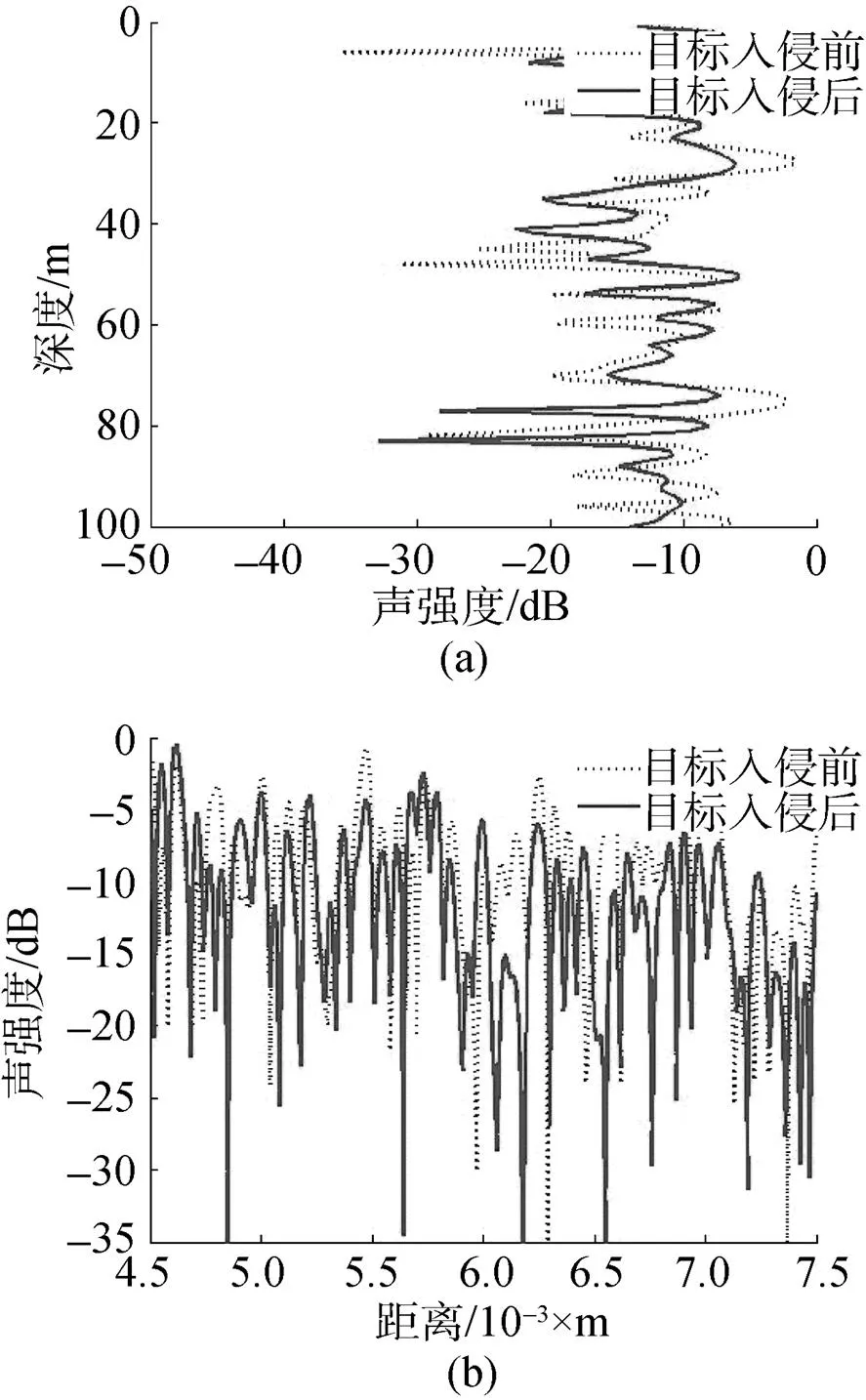
图2 未采用时反处理时目标入侵前后声场对比图

图3 采用时反处理时目标入侵前后声场对比图
由图3可知, 在稳定的浅海区域, 采用基于时间反转处理方法的目标入侵监测, 当有目标入侵时, 其声场强度比没有目标入侵时平均高了10~15 dB。对PS处的聚焦也产生明显的影响, 由于在时反信号后向传播的过程中, 应答器发射的信号严重影响了SRA发射的已储存时反信号, 2种同频率但不同幅度、相位的信号在应答器处进行了叠加, VRA接收到信号的相位和幅度发生畸变, 原聚焦位置的声线已经趋于离散, 能量散布范围很大, 聚焦效果减弱, 可以看到, 当加入声屏障后聚焦效果减弱, 当有目标入侵时, TRM产生的聚焦比没有入侵时在水平方向和深度方向上都有明显的影响, 其在PS距离上某些深度形成了较强的旁瓣, 旁瓣数目也有所增加, 同时聚焦主瓣降低。引起较强旁瓣数目增加和出现深度变化以及聚焦主瓣强度降低的主要原因是加入声屏障后对时反声场后向传播造成了严重影响, 其产生的声场比原聚焦声场平均低了10~15dB。因此, 在稳定的浅海环境中, 采用基于时间反转处理的海洋监测方法, 可以依据目标入侵时的干扰所造成的声场明显变化, 迅速判断出目标的入侵。
为了更好地研究时反处理方法在浅海目标监测上的应用, 本文对比研究了干扰声源的强度、位置对时反聚焦的影响。图4给出了3种不同系统增益干扰声源在相同位置处对时反聚焦的影响。图4为3种不同系统增益干扰声源产生的声场和未加入应答器时反聚焦产生的声场在垂直方向上和水平方向上的对比。
由于在时反后向传播过程中, 时反信号和应答器产生的信号这2种同频率但不同幅度、相位的信号进行了叠加, VRA接收到的叠加信号的相位、幅度已经发生畸变, 原聚焦位置的聚焦强度降低, 较强旁瓣数增多, 聚焦效果减弱, 随着系统增益的增强, 也就是物体的目标强度越大, 时反聚焦效果减弱, 旁瓣增高, 此时, 对时反聚焦产生了明显的影响。这主要是由于在时反后向传播过程中, 系统增益越高, 其模拟的物体目标强度越大, 应答器产生的干扰信号愈加严重影响原时反信号, 对时反聚焦的效果影响越大, 使得物体更加容易被探测到。
图5给出了应答器采用56 dB的系统增益, 其置放深度为75 m, 距离PS的水平距离分别为4 km, 3 km和2 km 3个不同位置对时反聚焦的影响。图5为应答器在3个水平距离不同的位置处产生的声场和未加入应答器时反聚焦产生的声场在垂直方向上和水平方向上的对比。通过图5可以得出, 随着模拟入侵目标应答器的水平位置的变化, 时反聚焦的效果也发生了比较明显的变化: 当应答器远离PS时, 其与SRA的水平距离减小, 其对SRA发射的已储存时反信号的影响越大, 时反信号和干扰信号的叠加部分更多, 从而对时反阵在PS处的聚焦产生的影响越大。从以上分析可知, 当入侵目标离PS水平距离越远, 其越容易被时反阵形成的水下监测系统发现。

图4 目标增益不同时声场对比图
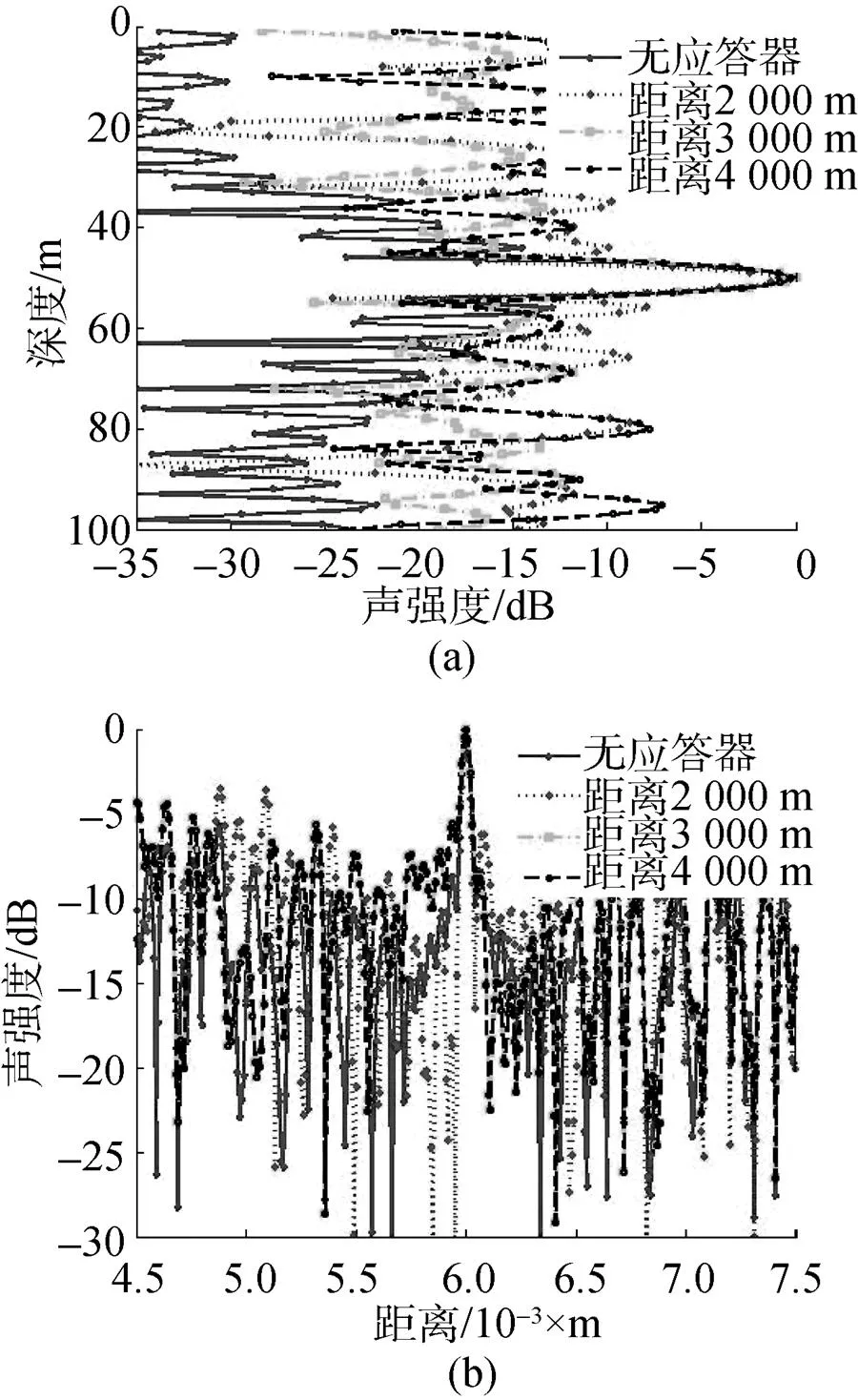
图5 应答器与发射点源(PS)水平距离不同时声场对比图
图6对比了应答器采用56 dB的系统增益, 距离PS的水平距离分别为4 km, 置放深度选择75 m, 45 m和25 m 3个不同位置对时反聚焦的影响。图6为应答器在3个置放深度不同的位置处产生的声场和未加入应答器时反聚焦产生的声场在垂直方向上和水平方向上的对比。

图6 应答器为不同置放深度时声场对比图
Figs. 6 Contrast among sound fields for different de- pths of responder
由图6可以看出, 当干扰源的置放深度发生变化时, 其对时反聚焦效果的影响也在变化。干扰源置放在上层高声速水域及靠近海底的区域时, 其对时反聚焦效果的影响比较小。这时, 由于干扰源位于上层高声速水域中, 其激发的低阶简正波模态幅度值远小于最强的模态, 这意味着这些低阶简正波模态对声场是没有贡献的。虽然上层高声速水域中的声源可以与高阶简正波模态进行强耦合, 但是与低阶简正波模态耦合很弱, 所以当干扰声源位于上层高声速水域中时, 其对时反聚焦效果的影响较差; 而位于海底附近的应答器发射的信号受到海底反射和海底混响的影响, 信号损失比较大, 对SRA发射的时反信号产生的干扰比较小, 从而对时反聚焦效果影响也就比较小。当干扰源位于下层低声速水域中时, 其可以很好地激发所有简正波模态, 所以其对声场的贡献比较大, 对时反聚焦的效果影响就比较大, 水下监测系统的敏感度就比较高。
3 结束语
该文以浅海声传播模型为基础, 利用时反处理方法不需要环境先验知识的聚焦特性, 建立了基于时反镜的水声实时监测系统模型, 用以实现对入侵浅海的小型目标或散射回波强度小的目标的实时监测, 描述了该方法的具体实施步骤, 为了验证该文所提方法的有效性, 采用应答器来模拟小目标入侵, 通过数值分析和计算机仿真验证了这种方法在复杂浅海环境中对目标实时监测的有效性。结果表明, 其对目标的敏感度远高于传统检测方法。在此基础上, 文章对比研究了入侵目标强度、置放深度和与时反阵水平距离等因素对基于时反镜的实时监测系统探测敏感度的影响, 并通过仿真和理论分析得到如下结论: 1) 物体的目标强度越大, 其对时反聚焦产生的影响就越明显, 越容易被即时发现; 2) 入侵目标距离PS的水平距离越远, 其越容易被基于时反镜的水下监测系统发现; 3) 当目标位于下层低声速水域时, 其更容易被探测到。本文的研究对基于时反的沿海警戒方法的实际应用具有重要参考价值。
[1] Song H C, Hodgkiss W S, Kuperman W A. Multiuser Co- mmunications Using Passive Time Reversal[J]. IEEE Jo- urnal of Oceanic Engineering, 2007, 32(4): 915-926.
[2] Edelmann G F, Akal T, Hodgkiss W S. An Initial DemonStration of Underwater Acoustic Communication Using Time Reversal[J]. IEEE Journal of Oceanic Engineering, 2002, 27(3): 602-609.
[3] Kuprtman W A, Song H C. Phase Conjugation in the Ocean: Experimental Demonstration of an Acoustic Time- reversal Mirror[J]. Journal of the Acoustical Society of Ameri, 1998, 103(1): 25-40.
[4] Song H C, Hodgkiss W S, Kuperman WA. Experimental Demonstration of Adaptive Reverberation Nulling Using Time Reversal[J]. Journal of The Acoustical Society of America, 2005, 118 (3): 1381-1387.
[5] 游伟, 何子述, 胡进峰. 基于匹配场处理的天波雷达高度估计算法[J]. 电子与信息学报, 2013, 35(2): 401-405.You Wei, He Zi-shu, Hu Jin-feng. Skywave Radar Altitude Estimation Algorithm Based on Matched-field Processing [J]. Journal of Electronics & Information Technology, 2013, 35(2): 401-405.
[6] 任岁玲, 郭良浩, 金燕利. 基于特征分析的自适应干扰抑制方法在水声目标被动测距中的应用[J]. 应用声学, 2013, 32(4): 312-319. Ren Sui-ling, Guo Liang-hao, Jin Yan-li. Short Baseline Positioning Based on Virtual Time Reversal Mirror[J]. Applied Acoustics, 2013, 32(4): 312-319.
[7] 周洁, 潘翔, 李建龙. 时间反转处理用于目标探测研究[J]. 浙江大学学报, 2008 , 41(12): 20-26. Zhou Jie, Pan Xiang, Li Jian-long. Target Detection Based on Time Reversal Processing[J]. Journal of Zhejiang University, 2008, 41(12): 20-26.
[8] Qu S C, Wang Y M. The Focusing Performance of the Target at Different Depths with Time-reversal Array in Shallow Water[C]//2013 IEEE ICSPC, Kunming, 2013, 711-714.
[9] Song H C, Kuperman W A. Demonstration of a High-fr- equency Acoustic Barrier with a Time-reversal Mirror[J]. IEEE Journal of Oceanic Engineering, 2003, 28(2): 246- 249.
[10] Jesus S M. A Time-reversal Suboptimal Detector for Underwater Acoustic Barriers[C]//IEEE Journal of Oceanic Engineering, Quebec, 2008: 1-7.
[11] 王晓宇浅海水平阵时反处理混响抑制技术研究[D]. 西安, 西北工业大学, 2012.
[12] 张波, 马忠成, 宋曼. 浅海环境中应答器法测量水下平台声目标强度的理论分析[J]. 应用声学, 2013, 32(24): 109-115.
Zhang Bo, Ma Zhong-cheng, Song Man. Theoretical Analy- ses of Measurement of the Acoustic Target Strength of Un- derwater Platform Using the Transponder Method in Shallow Water[J]. Applied Acoustics, 2013, 32 (24): 109-115.
(责任编辑: 杨力军)
A Target Monitoring Method in Shallow Water Based on Time Reversal Processing
(School of Marine Science and Technology, Northwestern Polytechnical University, Xi′an 710072, China)
A method to generate a cordon based on the time reversal processing for real-time target monitoring and judgment in shallow water is proposed. The effects of target strength and depth, the horizontal distance between the target and the source received array, and other factors on the sensitivity of the monitoring system are analyzed theoretically. Numerical simulations and theoretical calculations for typical shallow water environment demonstrate that the proposed method is better than conventional alert method in shallow water. The proposed method is suitable for detecting small targets and the targets with small scattering echo intensity, and is not influenced by complex shallow water acoustic channel and multi-path effects.
shallow water alert; time reversal processing; target monitoring
TJ630.34; TN929.3
A
1673-1948(2014)06-0430-06
2014-09-16;
2014-10-06.
国家自然科学基金资助(51407142).
曲少春(1986-), 女, 在读博士, 主要研究方向为水下信号处理技术.
