UUV技术发展与系统设计综述
2014-02-28唐献平
钱 东, 唐献平, 赵 江
UUV技术发展与系统设计综述
钱 东1, 唐献平2, 赵 江1
(1. 海军装备研究院, 北京, 100161; 2. 中国船舶重工集团公司 研究中心, 北京, 100012)
为了使商用UUV设计能够满足军事需求, 实现军民两用, 通过对军用UUV的分级和口径约束问题的讨论, 以及对国际主流UUV的主要性能特征的分析和归纳, 简述了UUV市场化和军方选用情况; 同时, 从总体构型、推进器和控制面、能源系统、耐压壳体和湿空间、探测传感器、通信、发射与回收等方面分析了UUV关键要素的设计类型及其优劣, 以及UUV典型结构属性及其影响因素。通过以上分析, 对军用UUV的设计提出了以下建议: UUV设计应采用开放式结构和模块化设计, 以适应多任务需求; 中、小型UUV宜采用533 mm和324 mm标准建制口径, 以满足军事适用性要求; 深海UUV宜采用以组部件和载荷密封耐压设计为主的方案, 以降低对UUV总体结构的密封耐压要求。
UUV; 系统设计; 军民两用
0 引言
与近20年来, 与无人机(unmanned aerial ve- hicle, UAV)的井喷式发展类似, 无人水下航行器(unmanned underwater vehicle, UUV)也正步入发展快车道。目前世界上的UUV已达数百种, 活跃在海洋科学、海洋工程、水下安保和水下作战等各领域。马航MH370失踪事件更是将UUV推到众人瞩目的前台。在众多UUV中, 有些是在国际市场上享有一定声誉、较为成功的商用或军民两用产品, 有些是军用高端装备, 更多的是尚未市场化, 或仍处于大学和实验室开发阶段的科研和技术验证平台, 其中不乏一些构思奇特的概念样机。就一般概念而言, 只要换装合适的任务载荷和功能模块, 多数商用UUV也可被用于军事领域。然而, 若当初在UUV系统设计时未充分考虑军事需求, 则即使经过改装, 最后形成的任务能力也往往会受到很大限制。因此, 成功的军民两用型UUV应在设计之初就充分考虑到军方用户需求, 这也是保证其商业成功的重要因素之一。
本文对当今国际上主流UUV的设计特点和优劣进行了初步分析, 探讨有关系统设计问题, 提出适合于军用UUV的设计建议。
1 分析对象及其属性
1.1 分析对象
所选的分析对象主要是活跃于市场上的有代表性的主流产品和美军方可能选用的UUV, 主要考虑到: 1) 市场地位, 其主要标志有用户数、产量、应用面和产品知名度等; 2) 产品成熟度和商业化程度, 其主要标志是用户可独立完成操作, 一般情况下无需生产商提供技术支援; 3) 公开了比较详细的产品数据; 4) 美国军方装备、研制可能选用的UUV产品。除此之外, 也选出一些产量虽低、但具有特殊结构属性、任务能力较强的UUV作为分析对象, 如Lockheed Martin公司的 Marlin和美海军研制的Seahorse等。低产量UUV、大学和实验室开发的未商业化的UUV样机不列入分析对象。此外, Pluto, Seafox, SeaCat等早已被熟知的反水雷UUV也未被列入分析对象。
1.2 属性
UUV的系统属性主要取决于用户需求和可用的成熟技术。能表征UUV特点的基本属性有: 任务或应用领域、总体布局与构型、推进器、控制、能源系统、耐压壳体和湿空间、任务载荷(如传感器)、导航、通信、发射与回收等。这些属性基本上代表了UUV的主要特征, 勾画出其总体概貌, 体现了其任务能力和技术水平。
2 UUV分类、级别与主流产品系列
2.1 UUV的分类与级别
目前国际上尚无统一的UUV命名规则和分类方法, 一些UUV的命名方式反映出开发者和用户的不同视角和主要关注点。根据出现的频率, 常见的命名方式有以下几种。
1) 产品名+序列号。这是武器装备命名的常用方式, 如: Marlin MK1/MK2/MK3(美), Seaotter MKII(丹麦), Seahorse I/II(美), Fetch 2/3(美)等。
2) 产品名+最大工作深度。如: REMUS 100/600/3000/6000(美), Hugin 1000/3000/4500 (挪威), Alistar 3000(法)等, 数字的单位是m, 凸显出许多用户所关心的深海工作能力。
3) 产品名+口径。如: Bluefin-9/12/21(美), 数字的单位是inch(实际上准确值是9.375 in, 12.75 in, 21 in, 分别等于240 mm, 324 mm, 533 mm)。这类命名方式适合于鱼雷型UUV, 平台适装性一目了然, 且从尺度上可以对UUV的携载能力和续航力做出粗略判断。
4) 产品名+用途。如: Gavia Scientific/ Defence/ Offshore Surveyor(冰岛)。
商用UUV领域的还有一个常见现象, 就是许多产品名前还冠有公司名, 如: Lockheed Martin Marlin MK3(美), Atlas Maridan Seaotter MKII(丹麦), Boeing Echo Ranger(美), ECA Alistar 3000(法), ISE Explorer(加), SAAB Double Eagle(瑞典), SAAB AUV 62(瑞典)等, 显然是为了品牌及广告效应。
目前商用UUV没有明确的分级方法, 而对军用UUV而言, 被普遍接受的分级方法是美军方在UUV主计划中的4个级别划分: 大型、重型、轻型和微型, 也可按国内的习惯将其称为“大、中、小、微”型。近年来出现了更大的UUV, 被称为“超大型”。类似于舰船吨位在人们概念中的重要地位, UUV的吨位也是间接表征其能力的简洁而概略的指标, 所以按质量的分级方法更具有实用性, 也符合各国海军的习惯。在重型和轻型这2个关键级别定义中, 美军同时采用了口径和质量2个指标。其中, 口径533 mm和324 mm是强约束指标, 它直接照搬了国际通行的对重型鱼雷和轻型鱼雷的分类标准; 而质量则是一个参考范围值, 是弱约束指标, 在口径已定的条件下, 质量范围实际上间接限制了UUV的长度。双指标混合定义方法将这2个级别UUV的外形约束在标准鱼雷范畴内, 带来的好处是明显的: 平台适装性、保障性、运输性好, 适合部队装备和使用; 模块化程度高, 适合于多任务; 可利用成熟的鱼雷制造技术和试验设施, 有利于装备通用化, 也有利于控制研发和生产成本。
将533 mm和324 mm口径分别作为重、轻型UUV的标准, 体现出美军方对“建制能力”的高度重视, 这是利用各种现役海空平台实现前沿部署、快速抵达、广域使用的必要前提。搜索马航MH370航班的行动过程充分反映出装备“建制能力”的重要性。因此, 在一定范围内和一定程度上, 533 mm和324 mm口径, 尤其是533 mm口径, 可称之为军用UUV的“金标准”。 Bluefin公司瞄准军方需求, 主推遵循这2个口径标准的军民两用型UUV——Bluefin-12和 Bluefin-21, 后被美海军选用, 取得商业成功。
美军方并未对大型和微型UUV的结构参数提出明确要求, 给开发者以充分的自主创新空间和UUV能力提升空间, 体现出张弛有度的灵活策略和对不同需求的合理权衡。
20世纪90年代, 受限于当时的电池技术、载荷技术、电子技术, 人们在面对一些较复杂的水下任务时, 没有更多选择, 只能采用偏大的UUV。进入21世纪后, 较小的UUV已能完成同样的任务。所以, 民用UUV大多在向小型化发展。军方虽然在研发一些大型甚至超大型UUV, 以满足一些特殊的军事需求, 但533 mm以下的UUV仍占主导地位。
2.2 UUV主流产品及其分级
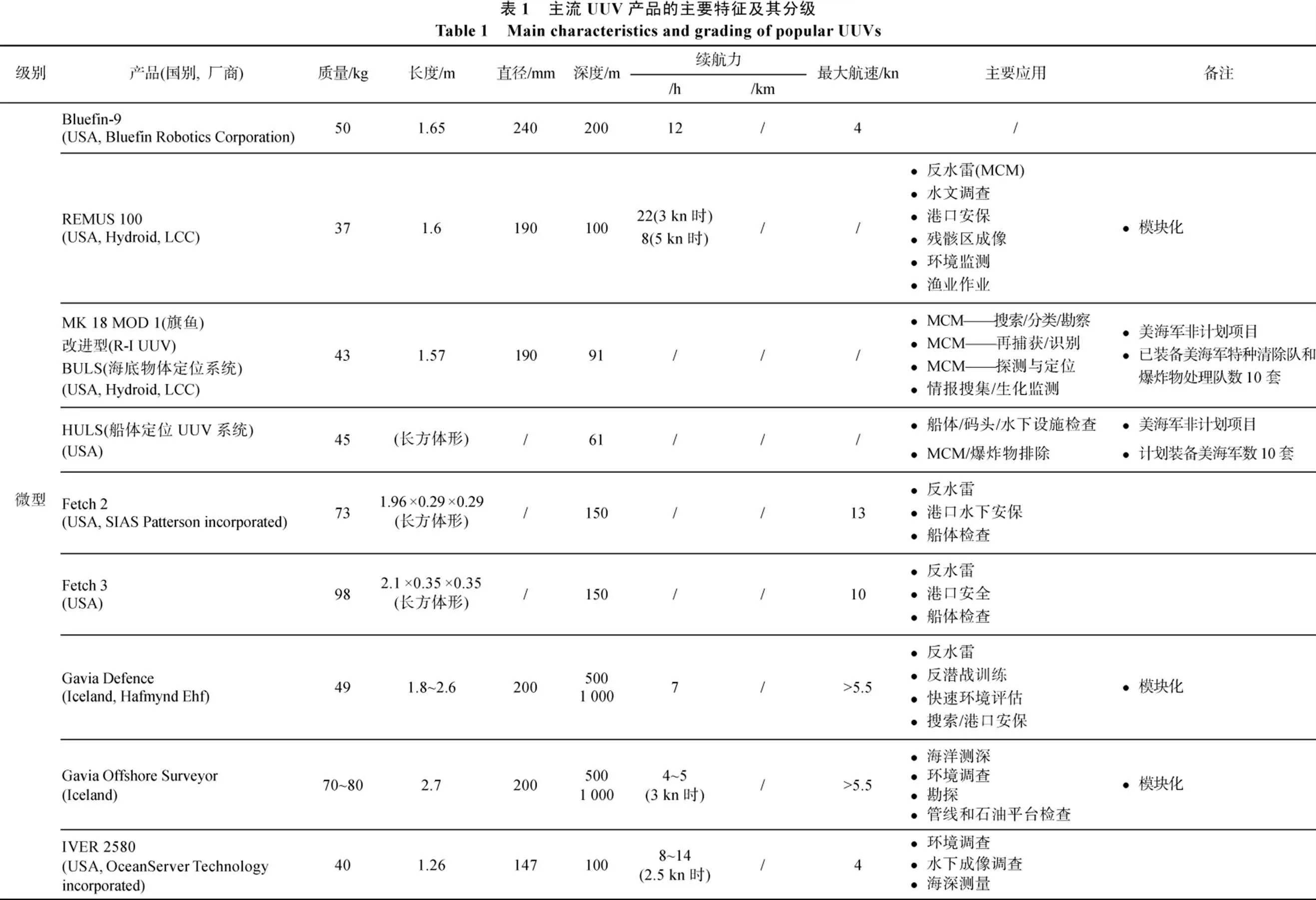
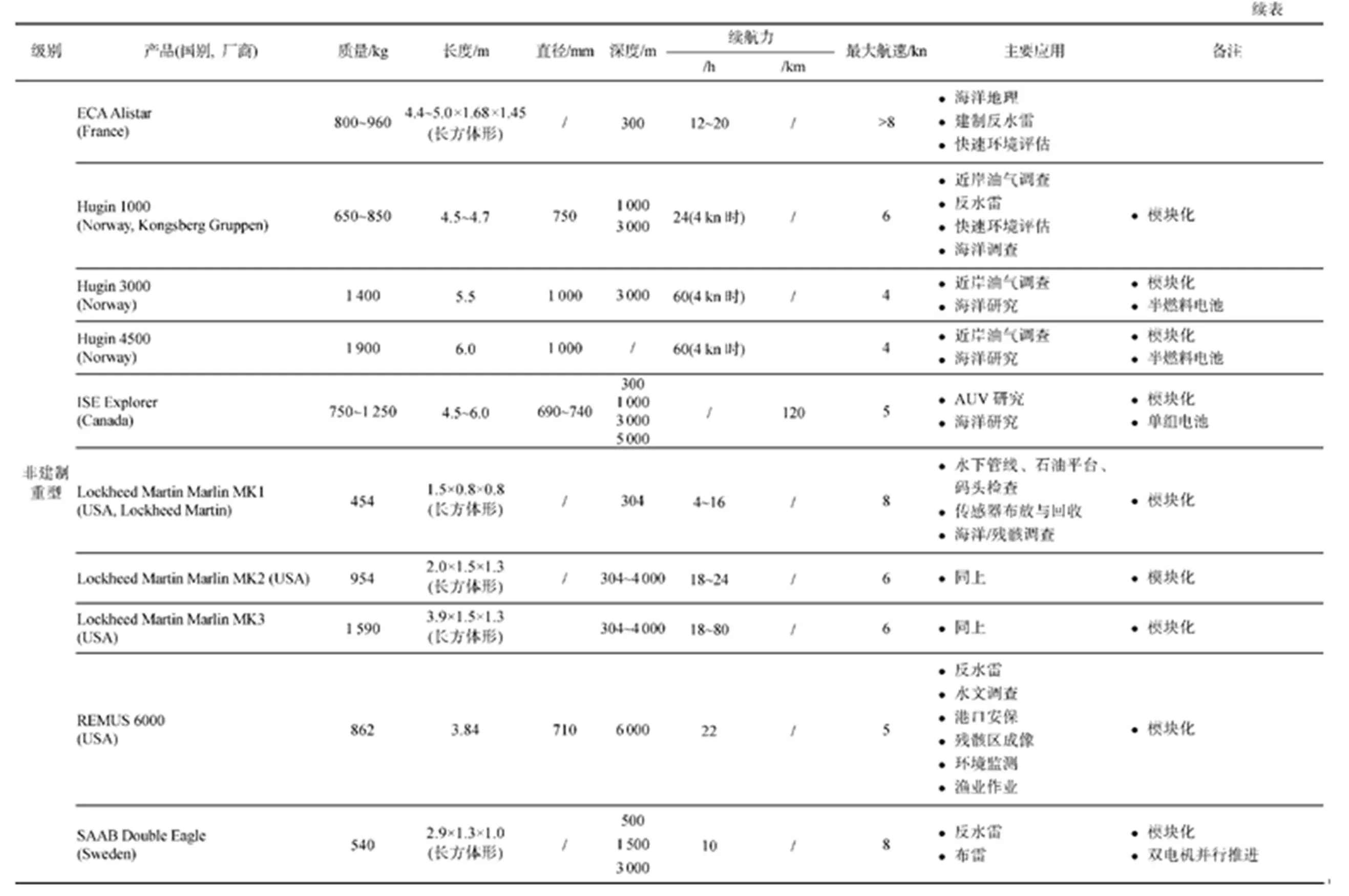
表1给出了主流UUV产品的主要特征及其分级[1-10], 本文将数百千克~1.5吨级的非533 mm口径的UUV归为“非建制重型”。
商业上比较成功的UUV主要有5个产品系列: REMUS, HUGIN, Bluefin, ISE Explorer和Gavia。其中销量最大的是美国的REMUS, 到2012年共交付了200多套系统[7]。除美国海军外, 日本也订购了4套REMUS 100, 用于反水雷和海啸后的海底调查与成像; 挪威的HUGIN到2005年共向军方和商业用户卖出8枚UUV, 另生产了2枚用于演示验证; 美国的Bluefin系列到2006年底已生产了50枚AUV, Bulefin-21的后续军用型号为Knifefish, 美国海军计划采购48枚[8]; 冰岛的Gavia(意为“伟大的北方潜水者”)到2010已向用户提交了20套系统[1]。被军方采用的比较著名的UUV也主要有5个产品系列: REMUS, Bluefin, HUGIN, Lockheed Martin Marlin和Seahorse。
2.3 评述
国际上比较有名的UUV大多起步于上世纪90年代, 并于本世纪初相继形成稳定的商用化产品。当时的技术和市场都不太成熟, 军方也未系统地提出军事需求, 所以各家基本处于早期自行探索和研发的“百花齐放”阶段, 因而UUV种类繁多、形态各异。2004年11月, 美海军首次公布UUV主计划, 系统阐述了军方需求, 以后又不断更新, 对军用UUV的发展起到了重要牵引作用。开发商意识到, 要获得军方大客户, 在产品系列设计时就应尽量遵循军方标准, 这样才能更好地实现军民两用, 从而取得商业成功。生产军民两用UUV的好处除了扩大市场外, 还有可能获得军方资助。另一潜在好处是有利于提高生产商和产品本身的声誉, 被军方选用是公认最成功的商业广告。最典型的例子是“蓝鳍金枪鱼机器人”公司(bluefin robotics), 直接瞄准324 mm和533 mm口径, 主推Bluefin-12和Bluefin-21产品系列, 获得批量订货。Bluefin-21在MH370航班搜索行动中被选用不是偶然的。美国Hydroid 公司是美海军最早的供货商之一, 为美海军开发从微小型到超大型各类UUV, 为了满足“建制式”需要, 他们专门开发了324 mm模块化产品REMUS 600, 它既可以用于反水雷, 也可广泛用于海洋调查、港口安保、环境监测、渔业作业等领域, 在业界也被视为比较成功的产品。
从表1可看出, 微型UUV产品线比较丰富, 主要原因是其成本低廉、使用便捷、技术门槛低、应用面广、有较广阔的低端用户市场等。同样, 重型UUV产品线也很丰富, 主要原因是: 1) 这一级别的UUV可容纳较多或较大尺度的任务载荷, 功能较强; 2) 有较大续航力; 3) 尺度有限, 使用的便易性可以接受。注意到非533 mm口径的民用UUV产品有较多型号, 这一方面反映出市场需求比较大; 另一方面也说明, 如果不受533 mm口径限制, 则设计、制造和系统集成的难度相对较低, 因而吸引了较多的开发者。不出意外, 324 mm轻型UUV的型号较少, 主要原因应是较小的尺度/质量限制了它的性能, 介于微型和重型UUV之间的产品定位使它处于有些尴尬的地位。但应指出, 这是一个值得重视的产品系列, 它所具备的独特优势是: 几乎适装各种海军水面平台, 还可由直升机和反潜巡逻机空投, 是非常理想的建制式装备, 特别适用于需要快速反应的场合。虽然用于完成特定任务的大型UUV的设计自由度较大, 但还是应考虑到远海使用时平台的适装性、高海况布放/回收性和航空运输性等。
在UUV界有这样一个现象: 即使是同一个型号名称, 厂家公布的技术数据和军方公布的也经常不同。这实际上反映出厂家针对军方需求所作的设计更改。一个典型的例子是, 厂家公布的Bluefin-21的最大工作深度可达4 500 m, 远大于军方公布的Bluefin-21 BPAUV的91 m指标。推测原因是, 厂家最初是按照大深度设计的, 这样可满足各类用户的要求。但海军从具体任务考虑, 并不需要过大深度。不同深度要求对密封壳体、独立密封模块和水密接插件的要求不同, 成本相差很大。因此, 海军定制降低某些指标的UUV是合理的, “好钢用在刀刃上”是“精明采办”的具体体现。
就搜索探测、海洋调查和海底测绘等任务而言, 军事和商业用户的需求大同小异。世界市场上商用UUV种类繁多, 对这类通用性强的UUV, 理想的国防采办策略是尽量选用成熟的商用技术和产品, 实现军民两用。从美海军的计划中可看出, 多数UUV项目是非计划项目, 军方提出需求, 开发商自行研制, 军方订货, 投入战场试用。军方主要投资有特定军事用途的高性能UUV。
3 UUV的主要设计要素分析
本节分析用户所关心的UUV主要设计要素、不同设计类型及其优缺点、适用对象和场合, 讨论UUV的系统方案选择、典型结构属性及影响这些属性的系统因素等问题。主要讨论6方面的属性: 1) 总体构型、推进器和控制面; 2) 耐压壳体和湿空间; 3) 能源系统; 4) 探测传感器; 5) 通信; 6) 发射与回收。
3.1 总体构型、推进器和控制面
1) 总体构型
UUV构型主要考虑流体动力特性, 所以大多数UUV采用鱼雷形状, 仅仅是长径比不同。鱼雷形状UUV的主要优点有: a. 阻力小, 能带来速度、流体噪声等方面的好处; b. 便于制成全耐压结构、非水密结构或混合结构, 适用范围宽; c. 发射和回收相对容易; d. 圆柱体结构更易于实现模块化, 便于功能段集成与置换; e. 回转体在结构上易于加工, 而具有复杂表面曲面的非对称体制造成本高。所以鱼雷形状是UUV的主流构型。
然而, 鱼雷形状UUV受外形限制, 其内外布局、推进方式和控制方式等的设计灵活性受到一定制约, 所以并不适合于需要精确操控的水下作业场合。因而, 水下作业型UUV一般不采用这种形状, 用于水下船壳检查和结构检查的微型UUV(ROV)也常不采用这种形状。作业型UUV的共同特点是: 对航速和航程没有过高要求, 强调的是水下操控性能。
多数商用UUV都采用突出于体外的固定天线或水声通信换能器导流罩, 影响了UUV线型, 增大了阻力。军用UUV应尽量采用平顺的鱼雷外形, 便于潜艇发射管发射。
2) 推进器
对于常规尾部鳍舵布局的鱼雷形状UUV, 如果不采用辅助推进器和前部鳍舵, 正常情况下的航行速度一般不低于2~3 kn, 这是因为过低的表面流速无法在鳍舵上产生足够的升力, 航行器难以被稳定、有效地操控。而矢量推进则可避免这一低速控制难题。根据厂家公布的信息, 采用矢量推进的Bluefin系列UUV, 速度覆盖范围为0.5~5 kn, 能保证足够的动态控制性能, 且几乎不受所搭载的载荷影响[2]。其性能令人瞩目。
鱼雷形状UUV一般靠鳍舵差动来控制横滚, 对于无鳍舵的UUV而言, 横滚控制是一个难题。虽然靠压舱物产生静倾或设置外部配平片等传统方法, 能将UUV配置成静平衡状态, 但难以全面适应速度和载荷变化、航行器机动和海流扰动等因素产生的航行器状态变化。Bluefin公司宣称, 他们将UUV设计为转矩平衡, 螺旋桨转速变化不会对UUV的横滚产生明显影响, 但没有公开所采用的控制技术(见图1)。尽管如此, 还是有学者对这种无鳍舵布局技术的推广前景表示怀疑。
图2为Bluefin尾锥段结构示意图, 图中标出了万向节上的航向枢轴和俯仰(纵倾)枢轴、驱动矢量推进器转向的作动器、安装在万向节上随导管推进器一同转向的推进齿轮电机。Bluefin矢量推进器角度调节范围为±15°, 角速度为30°/s[11]。

图1 Bluefin-21实物图

图2 Bluefin-21的尾锥段
文献[11]对万向节式矢量推进器进行了细致的研究, 给出了与Bluefin-21矢量推进器近似的原理示意图(见图3)。其中, 图3(a)给出了直接枢轴式万向节的结构原理图, 但图中的螺旋桨驱动方式与Bluefin-21不同, Bluefin-21用安装在万向节上、随导管一同转向的推进齿轮电机驱动螺旋桨, 而图3(a)所示的是采用柔性驱动方式, 驱动电机在UUV本体内, 柔性轴关节处的轴承安装在万向节的航向枢轴上, 即随着导管一同转动。图3(b)给出了直线作动器对直接枢轴式矢量推进器的驱动原理图, 这是Bluefin-21所采用的方式。
文献[11]认为, 直驱电机具有噪声小的优势, 但因直径较大, 很难像Bluefin-21那样将其安装在万向节上随之转动, 所以应采用柔性轴连接和驱动方式。图4给出了4种连接方式的万向节, (a)~(b)依次为: 球笼式万向节、三销轴式万向节、柔性万向节、U型万向节, 它们的优劣见表2。
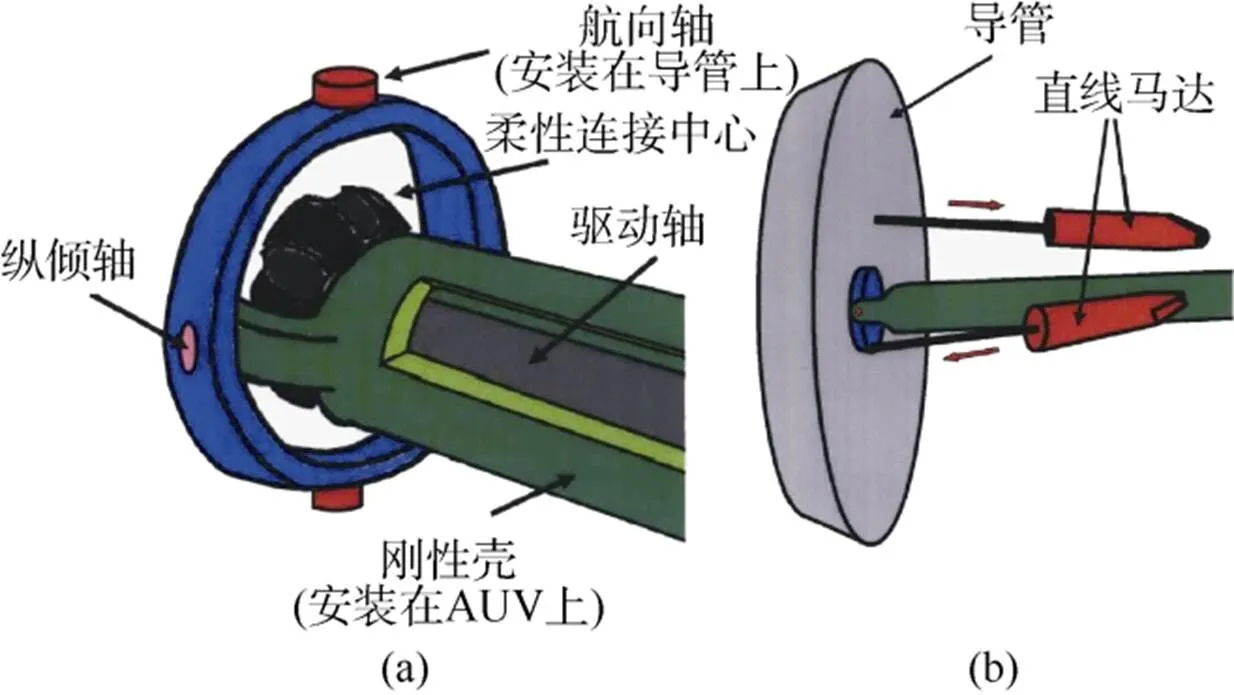
图3 Bluefin-21矢量推进器原理图
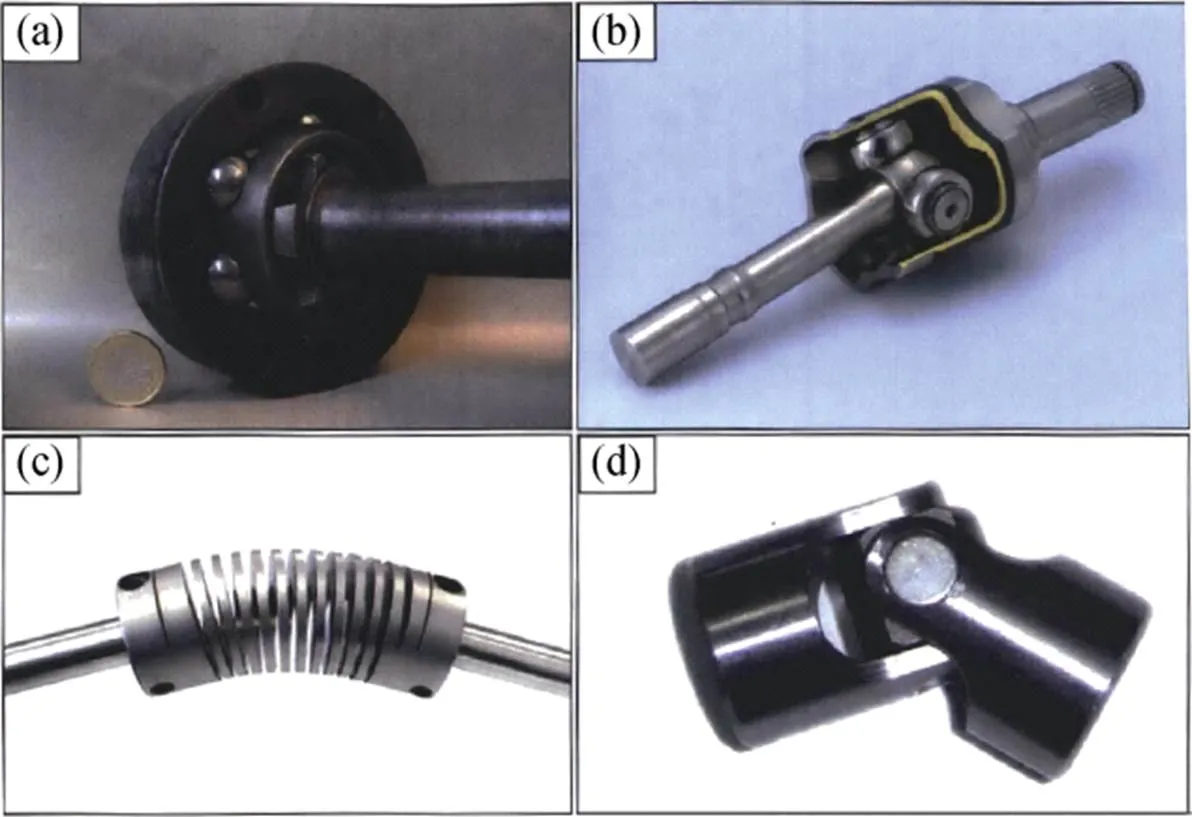
图4 4种柔性轴连接方式

表2 不同柔性轴连接方式优缺点对比
从矢量推进角度来看, 集成电机推进器(inte- grated motor propulsor, IMP)在UUV上应有更好的应用前景。由于是无轴推进, 简化了矢量推进器的动力传递问题, 可有效降低振动和噪声, 并规避了深海条件下动力转轴的动密封难题。
3) 控制面(鳍舵)
UUV控制面的设计目标主要是保证在低速条件下能有效控制航行体的姿态。控制面典型地布置于UUV后部靠近推进器处, 一般采用4或3个控制面, 取决于对控制面面积和驱动能力等因素的考虑。多数UUV采用传统的十字或X形鳍舵布局, 一般认为X形控制效率更高。而REMUS和HUGIN的部分产品采用尾部反Y形3鳍布局。有的UUV在前部采用2叶(如Explorer) (图5)或3叶(如REMUS)鸭翼(图6), 以增加在恶劣环境、近水面等条件下的操控性, 前部鸭翼控制段一般设计为独立的可选模块, 视情选装。Bluefin则取消了控制面, 转而采用万向节式矢量推进器。
Gavia采用较为独特的导管内桨后控制面(见图7)。这种设计的优点在于桨后流速高, 舵效高, 且管内舵不宜被污损和缠绕。但这类管内舵在安装、维护和驱动时的复杂性高于开式控制面, 可达性稍显逊色。泵喷推进器的前端定子叶片也有利于防止杂物缠绕螺旋桨和桨后控制面, Sea horse 的控制面虽不在推进器导流罩内, 但也在设计推进器后, 受前面导管推进器的保护。

图5 ISE Explorers的前后控制面

图6 REMUS 600的前后控制面
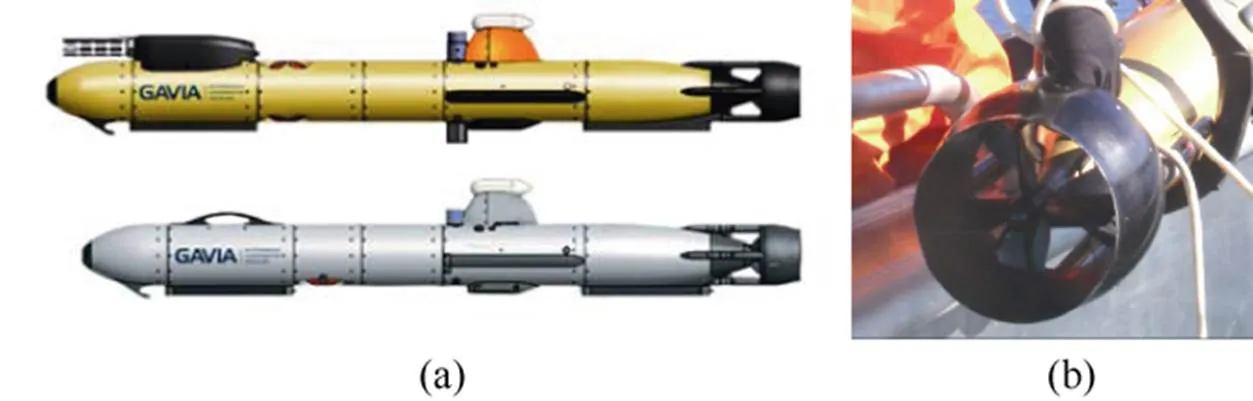
图7 Gavia的导管内桨后控制面
近海中遍布绳索、缆、尼龙绳、海藻等“软”废弃物, UUV的避碰声呐一般看不见, 因此最好采用有保护罩的控制面。当UUV需要低速航行或在浅海航行, 或传感器等载荷对UUV可控性有很高要求时, 可选用线形光滑的前部控制面。
3.2 耐压壳体和湿空间
UUV的结构分为耐压壳体密封舱结构和非水密舱结构, 多数UUV采用两者结合的结构, 只是某一类结构占主导地位。2种结构的比较见表3。
工作深度越大、密封容积越大, 耐压壳体的制造难度就越大, 所以工作深度大于600 m的重型UUV很少采用全封闭结构, 大多采用混合结构。军用UUV的工作深度大多小于300 m, 且追求大容积多载荷, 所以多采用类似鱼雷的全密闭结构。UUV一般采用圆柱形或球形耐压容器, 同时采用一些位置灵活的非水密舱。从非水密舱到耐压舱的过渡部分一般采用嵌入水密连接器的隔壁。多数UUV将电池置于耐压壳内, 但Bluefin和HUGIN采用可直接浸泡在海水中的密封耐压电池, 减少了对耐压壳体容积的需求。

表3 UUV 耐压壳体密封舱结构和非水密舱结构比较
结构设计中要考虑到工作深度、材料、浮力、结构和可达性(表征拆装和维修难度)。
1) 工作深度和耐压容器形状。耐压壳体的设计主要考虑工作深度和水密容积的需求。工作深度较小的UUV一般采用类似鱼雷的圆柱形耐压壳体, 且占据UUV大部分体积, 如REMUS 100和REMUS 600。由于球形容器耐压能力更强, 所以大深度UUV则趋向采用球形耐压容器, 一般占据UUV较少体积, 如: HUGIN 1000(见图8)和Boeing Echo Ranger(3000m)。而ISE Explorer (2 200m)采用圆柱形耐压舱, 两端采用半球形隔壁, 其水密与非水密部分体积基本相同。
图8 HUGIN 1000的总体布局和球形密封舱
2) 材料。UUV常用的10种材料: ABS塑料、塑胶、铝、碳素纤维、玻璃纤维、石墨环氧树脂、GRP(玻璃加强塑料)、HDPE(高密度聚乙烯)、钢、钛[1]。文献[1]给出了不同材料在不同工作深度UUV上的应用情况(见图9)。由图可见, 当深度大于2000m后, 就不再使用相对廉价的钢和铝了, 深水UUV一般采用HDPE, GRP, ABS和钛。大深度UUV趋向于采用球形非金属材料耐压容器。材料的强度不是唯一考虑的因素, 还要考虑抗腐蚀性和成本等因素。

图9 不同深度UUV的壳体材料
3) 浮力。UUV采用不同方法补偿正负浮力: a. 利用航行体速度、纵倾角和控制面上的力来控制升降; b. 用泵或压载水舱来调节浮力; c. 利用垂直面的推力来控制升降。对于大型UUV而言, 即使海水密度发生微小变化, 较大的排水体积也会产生明显的浮力变化, 所以大型UUV多采用浮力调节方法。对于负浮力大的UUV, 通常采用的方法是在非水密舱中配置浮材(比重轻于海水, 但不会被深海压力压坏), 或在耐压舱内增加空气空间。对于正浮力大的UUV, 通常在水密或非水密段中安装固体压载物。
4) 结构。除了考虑静压下的结构完整性外, UUV的结构设计还须考虑到: 水压对段连接的影响; 突出物的安装、壳体凹槽(用于电缆连接器和传感器)会引起应力集中; 有效载荷容积等。还要考虑到操作方便性、发射与回收方便性, 以及一些特定任务需求(如: 锚泊)。
5) 可达性和维修性。UUV耐压结构设计中的另一个关键考虑因素是UUV组件和子系统的可达性和维修性。
3.3 能源系统
能量是UUV航程的表征, 功率是速度和加速度的表征。对于低速UUV而言, 关注的主要是能量, 因此锂电池就成了必然的选择。UUV一般采用锂离子电池或锂聚合物电池。文献[1]分别给出了不同类型电池的比能量(见图10)和不同动力能源的Ragone图(见图11)。

图10 不同电池的比能量
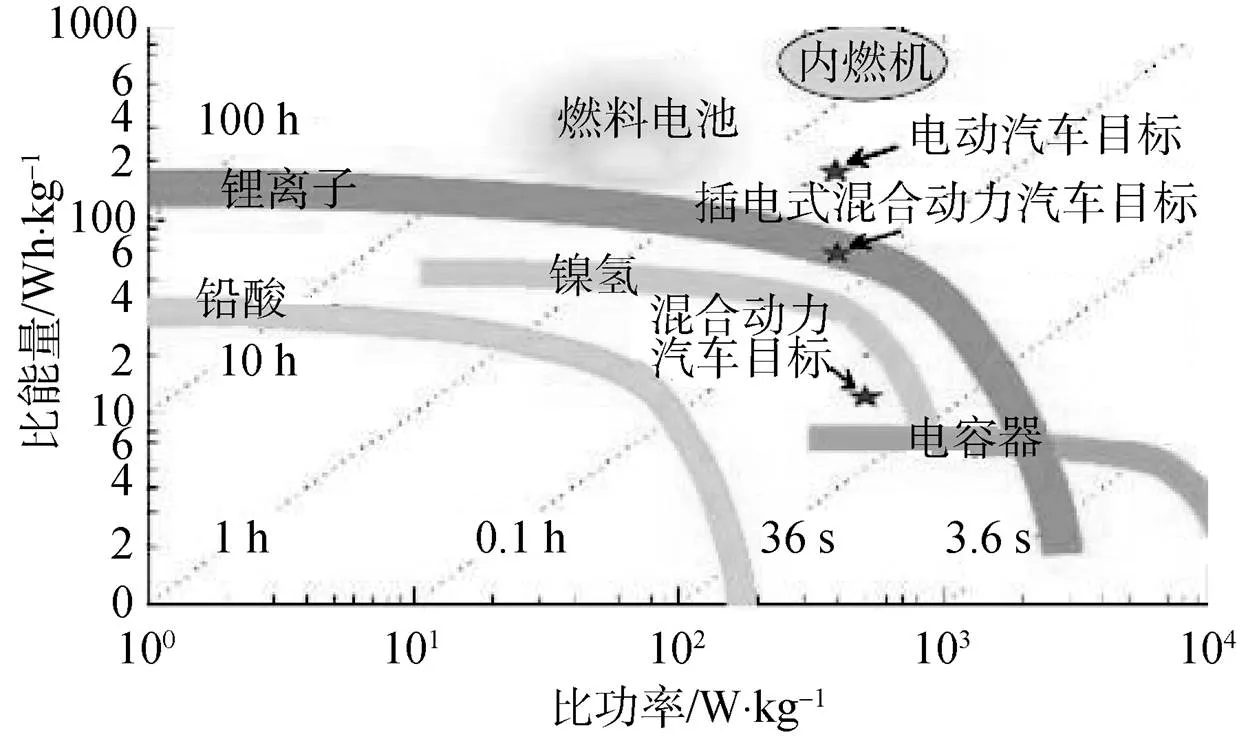
图11 不同动力能源的Ragone图
Bluefin和HUGIN采用水密耐压电池模块设计, 即电池模块直接浸泡在海水中。模块化密封耐压电池设计的主要优点: 1) 可大幅减少对耐压空间要求, 避免研制大型耐压壳体, 减少相关成本; 2) 有利于深潜; 3) 电池浸泡在海水中利于散热, 提高电池安全性; 4) 这种设计可用于各种非密封UUV结构, 适用面广。对用户而言, 最大的优点在于: 可实现现场快速更换电池模块, 而无需现场充电, 即插即用, 大大缩短了周转周期。例如: Bluefin-21采用了9块耐压密封的锂聚合物电池模块(9×1.5 kWh=13.5 kWh), 便于更换和维护(见图12)[2]。在搜索马航MH370期间, 每次下水超过20 h后, 只需在舱面维护(更换电池、下载数据) 2 h就可再次下水。对于深海作业UUV, 现场打开密封舱操作几乎是不可能的。如果采用传统的充电方式, 则一般需要多条UUV轮流下水, 作业效率和装备使用率远低于更换电池方式。所以, 采用水密耐压电池模块设计是深海UUV的一个重要技术方向。
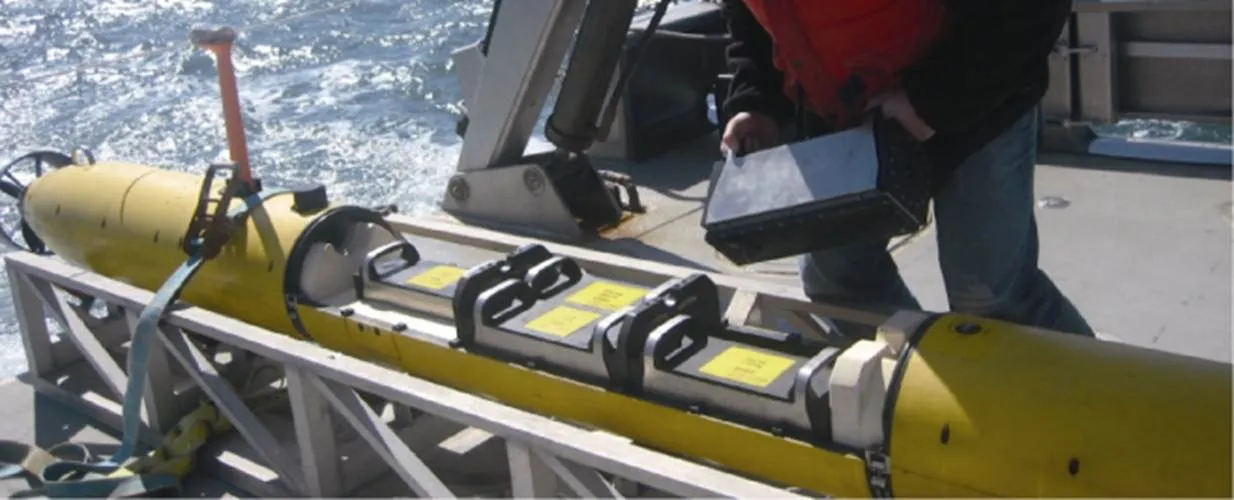
图12 Bluefin-21的1.5 kWh水密耐压电池模块
目前人们关注的重点仍是锂离子和锂聚合物电池的安全性。Bluefin Robotic公司开发的密封耐压电池的每个指标都按照指令9310.1b 经受了NAVSEA的滥用试验, 通过了潜艇使用认证[1]。
对于军用UUV, 应开发模块化能源系统开放式结构、标准的锂电池模块, 最好采用已经过认证的密封耐压锂二次电池, 适应多种UUV、多任务和多系统需求。一般电压30~50 V。
3.4 探测传感器
商用UUV携带的探测传感器有数十种, 携带最多的是双频侧扫声呐(side scan sonar, SSS)和温盐深仪(conductivity temperature depth, CTD); 其次是水下摄像机、前视声呐(forward looking sonar, FLS)、合成孔径声呐(synthetic aperture sonar, SAS)、海底浅层剖面仪(sub-bottom profiler, SBP)、声学多普勒流速剖面仪(acoustic doppler current profiler, ADCP); 携带较少的传感器有多波束测深仪(multi-beam echo, MBE)、浊度仪(tur- bidity)、磁力仪(magnetic anomaly detection, MAD); 偶尔也有UUV携带掩埋物扫描声呐(buried object scanning sonar, BOSS)、3D成像声呐、重力计、萤光计。为了配合导航定位, 有的UUV需携带超短基线(ultra short base line, USBL)、长基线(long base line, LBL)、合成长基线(synthetic long base line, SLBL)等声学传感器。
商用UUV最常见的用途是水下探测和成像, 因此SSS, 水下电视和CTD就几乎成了基线配置。SSS用于大范围扫测, 水下电视用于近距确认, CTD则为声呐工作深度选择和性能预测提供实测环境参数。由于SAS的分辨率比常规SSS高出1~2个数量级, 且与距离无关, 所以应用面日趋增加。
UUV传感器配置设计中主要考虑的因素有: 1) 尽量避免突出航行体外, 以防止受到撞击、缠绕或其他损伤; 2) 电磁兼容性; 3) 航行体自噪声对声学传感器的影响; 4) 可测性等。
3.5 通信
几乎所有的UUV都同时采用4种通信方式[1]: 卫星通信(satellite communication, SATCOM)、射频通信(radio frequency, RF/Wi-Fi)、GPS通信和水声通信(acoustic communication system, ACOM- MS), 这可视为是UUV通信系统的基线配置。设计中要考虑的因素包括以下几个方面。
1) 天线水线以上高度。天线高度决定了水面状态UUV的通信距离, 特别是视距内RF通信。SATCOM(如: 商用铱星)对水溅和海面反向散射均很敏感, 所以其性能也受到天线高度影响。除了天线高度外, 还要考虑到天线运动(如: 横滚)对稳定接收的影响。大多数商用UUV采用突出于航行体外的固定式天线, 建制式UUV一般采用伸出或折叠式天线, 以保持UUV的线形, 并可从鱼雷发射管发射。
2) 通信协议与数据操作。商用和军事通信的需求决定了UUV采用的数据格式和通信标准, 例如: 商用铱星系统采用自身数据/信息格式及UUV上的收发机, RF通信可采用典型的IEEE 802.11标准, 军用UUV可采用加密系统。
3)外部硬件的抗海水和抗压保护。ACOMMS和SATCOM都必须安装在壳体上, 与海水直接接触。设计中要考虑如何在UUV的工作环境中保护天线, 也要考虑保护天线用的材料, 圆顶形保护罩可能降低天线的效能。
4) 硬件布置与集成。水声通信基阵的布置取决于UUV对ACOMMS使用方式的需求。有些UUV, 如REMUS 600, 水声通信基阵典型地布置在UUV的较低部位, 以保证UUV在近水面状态时可与水面支援船有效通信。深潜型UUV, 如HUGIN 1000, 基阵布置在UUV的较高部位, 以保证UUV在深海航行时能与水面支援船有效通信。
3.6 发射与回收
UUV的发射和回收方式对总体设计有很大影响, 它决定了UUV诸多子系统的设计方案。
多数UUV从水面舰船的斜架滑入水中, 这是最简单的布放方式; “标准口径”的UUV可用鱼雷发射管发射; 大型UUV一般用专用装置布放。
已应用或研发成功的UUV回收方法主要有以下几种。
1) 小艇人工回收。只适合于微型UUV和海况较好的场合。
2) 水面吊车垂直回收。大多数UUV采用这种方法。水面船和UUV相互机动到合适位置, 船上人员捕获UUV放出的回收缆, 将UUV拉至船边后, 用吊车垂直吊起, 但这种方式只适合于海况较好的情形(如: REMUS 600)。
3) 斜槽水面回收。UUV放出较长回收缆, 船上人员捕获后, 用绞车将UUV沿斜槽拉上甲板。斜槽一般位于船尾。这种回收方式适合于海况较差的情况(如: HUGIN 1000)。
4) 水下坞站回收。回收船放出喇叭状的栅状笼(坞站), UUV跟踪回收笼上的水声应答器, 自主游入笼中, UUV与笼中定位销及插头连接后, 可以直接与船上系统交换数据, 并进行充电, 或被回收缆拖回到船上(如: REMUS 100, 见图13)。这种导引和水下自动对接回收方法原理上也可应用于潜艇回收UUV。
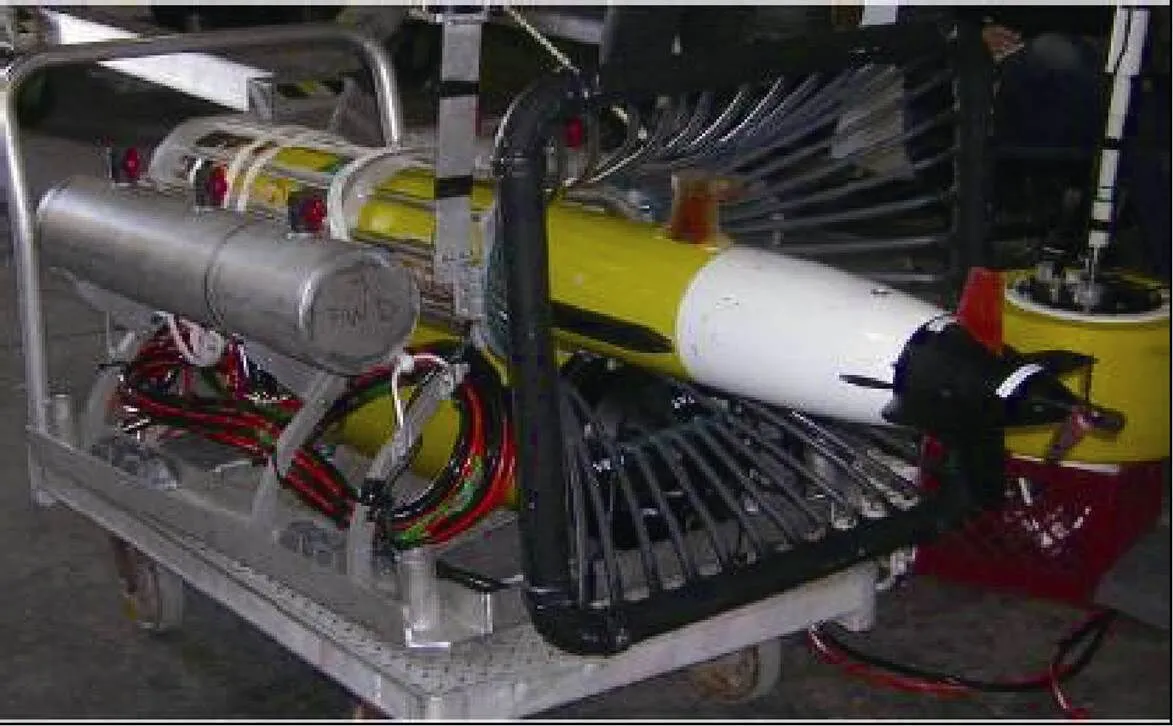
图13 坞站中的 REMUS 100
5) 垂直缆捕获导引。这是一种较为特殊的水下回收方法。回收船放出垂直缆, UUV用水声跟踪系统寻的, 并利用头部放出的八字叉形捕捉机构捕获并锁定回收缆, UUV利用垂直推进器或改变浮力的方法来沿垂直缆上下移动(如: Lockheed Martin Marlin, 见图14)。对于军用UUV, 除了水面舰船可放出下垂的回收缆外, 潜艇也可放出垂直上浮的回收缆, UUV扣住后, 可利用回收缆将其拉入回收舱[1]。

(a)张开捕捉叉逼近回收缆 (b)捕获回收缆后沿缆上浮
6) 自主进舱。此种回收方式由美国海军开发。潜艇上驮负一个UUV舱, 用于携载、布放和回收大型UUV。回收时, UUV自主游入舱中。
7) 潜艇鱼雷管机械臂回收。此种回收方式由波音公司开发。从上部鱼雷发射管中伸出的装有导引、摄像等系统的回收臂, 抓住533 mm口径UUV后从下部鱼雷管倒推入艇内。
8) 潜艇垂直导弹发射筒回收。美海军与通用动力电船公司2014年刚测试的“通用发射与回收模块”(universal launch and recovery module, ULRM)原型, 从巡航导弹核潜艇的导弹发射筒发射和回收UUV或其他有效载荷(见图15)。潜艇内部的升降机传送装置将UUV从潜艇内部运送到艇体之外, UUV通过液压和机械装置临时固定。潜艇先释放与导弹发射筒顶部相连的通信浮标, 随后UUV从导弹发射筒发射, 通过浮标通信。任务完成后, UUV返回, 被收回发射筒内, 浮标亦被收回。前期测试采用的是约4.5 t的Marlin UUV原型(Lockheed Martin), 计划2015年在巡航导弹核潜艇上进行海试, 该系统的最终战术版本将可发射和回收1.524 m口径、长度7 m、总重约13.6 t的大型UUV[12]。
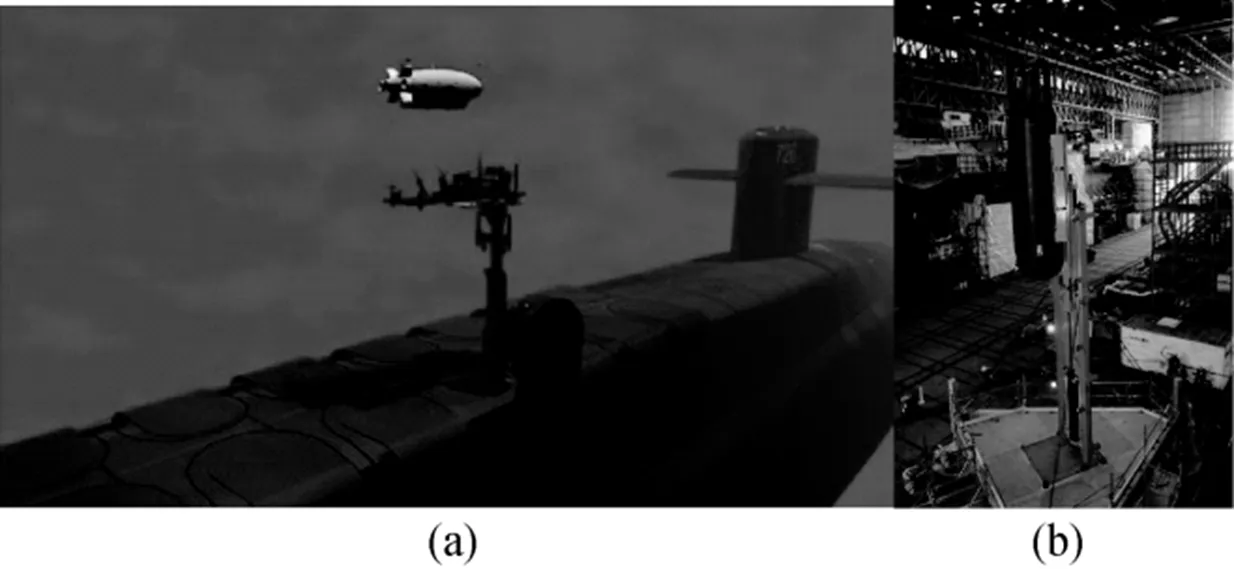
图15 美国大型UUV潜艇回收装置——“通用发射与回收模块”
4 结束语
在UxV(UAV, UUV, USV, UGV的统称)领域,人们对UUV的关注仅次于UAV, 因此越来越多的UUV被相继开发出来, 有数百种之多。如果仅仅满足于在浅水进行简单作业, 则技术门槛似乎并不高, 许多研究机构、大学、企业都可以开发出演示样机。然而, 要开发出真正具有市场价值的UUV产品却并非易事。要取得商业成功, 就应该充分了解用户需求、仔细进行系统设计, 使UUV产品不仅具有优良性能, 还具有广泛的适用性和足够的保障性。
尽管与其他UxV相比, UUV的工作环境更不利, 给探测、通信及导航带来一系列困难, 但人们还是可以通过合理的设计, 充分利用UUV所具有的一些独特优势, 使之发挥出更高的效能。例如: 与UAV相比, UUV最大的优势可能在于对质量不敏感, 不会像飞行器那样对任务载荷“斤斤计较”。这意味着, 可以充分利用这一特性, 采用开放式结构和以“段”形式出现的模块化任务载荷, 只要将“段”配置成合适的正/负浮力, UUV的长度、质量、形状就几乎不受限制(在动力能源允许的情况下), 这使得UUV可以通过换装或增加功能模块执行多种任务, 尤其是具有很强的投送能力。再如, 与UAV不同, UUV能以低功耗方式静止悬停, 可利用这一特性为其设计完成水下精确识别和作业任务的载荷; 也可利用其可长时隐蔽待机的特点, 为其设计相应的任务能力。
若产品能被军方选用, 则在很大程度上表明该产品具有较高的技术水平和能力, 往往会进一步带来商业上的成功。因此, 设计军民两用UUV应是较好的开发和商业策略。从适用性角度考虑, 对这类UUV的系统设计有以下建议: 1) 尽量采用回转体外形, 重型(中型)、轻型(小型)UUV尽量采用533 mm和324 mm“标准建制口径”; 2) 为满足多任务需求, 应采用开放式结构和模块化设计; 3) 深潜型UUV宜采用以湿空间为主的结构, 以降低对大容积耐压容器的要求; 4) 尽量采用经过认证的标准化密封耐压电池模块, 标准电池模块不应太大, 这样能够以组合的方式适用于不同级别的UUV, 并易于保障; 5) 基线通信方式采用RF (Wi-Fi), SATCOM及GPS/BD, 双向ACOMM, 采用折叠(或升降)天线, 防止缠绕, 降低易损性, 并适用于潜艇发射; 6) 尽量采用适合于较高海况的回收方式, 如斜槽回收、自主导引回收等。
可以预见, 在未来几年内将会出现更多的像Bluefin和REMUS那样世界著名、商业成功、受军方青睐的UUV产品。
[1] Daniel W. French. Analysis of Unmanned Undersea Vehicle(UUV) Architectures and an Assessment of UUV Integration Undersea Applications[R]. Naval Postgraduate School, 2010.
[2] Monterey Bay Aquarium Research Institute. 蓝鳍金枪鱼设计技术[EB/OL]. [2014-04-01] US: Bluefinrobotics Corporation. http://www.bluefinrobotics.com/technology/.
[3] United States Department of Defense. Unmanned Systems Roadmap 2007-2032[R]. US: United States Department of Defense, 2007.
[4] Anon. Seahorse AUV[EB/OL]. [2014-04-01] http://www. naval-drones.com/ Seahorse.html.
[5] Senke W, Phaneuf B. Extremely Large Unmanned Underwater Vehicles (ELUUV) as a Force Multiplier[C]// Hamburg: UDT′2013, 2013.
[6] Defense Advanced Research Projects Agency. Hydra [EB/OL].[2014-04-01] http://www.darpa.mil/Our_Work /TTO/Programs/ Hydra.aspx.
[7] Lundquist E H. Unmanned Underwater Vehicles, Is Bigger Better, or Smaller Smarter?[J]. Naval Foeces, 2012, 32(3).
[8] Anon. Knifefish Artemis[EB/OL]. [2014-06-01]http:// www.navaldrones.com/knifefish.html.
[9] Autonomous Undersea Vehicle Applications Center. Echo Ranger Configuration[EB/OL]. [2014-06-01] http://auvac. org/configurations/view/13.
[10] Autonomous Undersea Vehicle Applications Center. Proteus Configuration[EB/OL]. [2014-06-01] http://auvac.org /configurations/view/239.
[11] Nawrot M T. Conceptual Design for a Thrust-Vectoring Tailcone for Underwater Robotics[D]. US: Massachusetts Institute of Technology, 2012.
[12] 美国测试新型潜射潜航器系统[EB/OL]. (2014-02- 08)[2014-06-01] http://www.81tech.com/news/shijie-chu- anbogongye/137438.html.
(责任编辑: 陈 曦)
Overview of Technology Development and System Design of UUVs
QIAN Dong, TANG Xian-ping,ZHAO Jiang
(1. Naval Armament Academy, Beijing 100161, China; 2. Research Center, China Shipbuilding Industry Corporation, Beijing 100012, China)
To promote UUV design for both civil and military applications, the grading and diameter restriction of military UUVs are discussed, and the performances and characteristics of popular UUVs in world market are summarized. The key architectural aspects of UUVs are analyzed, such as overall formations, propulsors, control surfaces, energy systems, pressure hulls and wet volume, sensors, communication, launch and recovery. The typical structure properties of UUVs and the influencing factors are discussed. Suggestions about design of military UUVs are offered as follows: 1) open structure and modularization should be adopted for multi-task requirement; 2) medium-weight and lightweight UUVs should take the diameter of 533 mm or 324 mm to meet the military suitability; and 3) watertight components and payloads should be designed for deep diving UUVs in order to decrease the difficulty in manufacture of pressure hulls.
unmanned underwater vehicle (UUV); system design; civil and military application
TJ630; TP242
A
1673-1948(2014)06-0401-14
2014-07-07;
2014-07-30.
钱 东(1958-), 男, 硕士, 高级工程师, 长期从事鱼雷武器系统总体技术研究.
