基于水下运动目标流场信息的仿生探测原理
2014-02-28张静骁贾曦雨王树山
马 峰, 张静骁, 贾曦雨, 卢 熹, 王树山
基于水下运动目标流场信息的仿生探测原理
马 峰, 张静骁, 贾曦雨, 卢 熹, 王树山
(北京理工大学 机电学院, 北京, 100081)
鱼类侧线器官利用水介质的流动信息进行环境感知与探测, 该原理为水下探测技术提供了新的发展方向。基于鱼类侧线的仿生探测原理, 研究以运动目标绕流场为信息源的目标探测原理问题, 建立了球头圆柱体绕流的仿真分析模型, 结合势流理论分析和仿真规律分析, 初步揭示了水中运动体目标特性与运动体绕流场特征参量之间的关联规律, 即通过对曲线峰值、谷值、斜率的计算获得了与运动体速度、长度、半径、观测点信息相对应的特征参量, 探索了利用水下运动体绕流场信息进行目标探测的可行性。
鱼类侧线; 绕流场; 仿生探测; 势流理论
0 引言
水下探测技术是海洋开发相关技术中的核心技术之一。受限于水介质的强吸收特性, 目前发展相对成熟的水下探测原理仅声探测一种, 但需注意的是, 海洋中盐/温/密度的变化以及海况和海底复杂环境都对水中声信号产生重要的影响; 同时, 水下隐身技术深入发展也对声呐技术提出了更为严峻的挑战。因此, 探索基于其他信息源的新型探测原理对于水中探测技术的发展具有重要的意义。
鱼类具有独特的水下探测方式, 通过借助特殊的探测传感器官(侧线)实现在复杂流体环境中的猎物追踪、地图定位和机动避障等功能[1]。该探测原理以相对运动目标间的水介质流动信息作为信息源, 与传统的水声探测原理截然不同。一方面, 水下运动体绕流场信息与其自身的尺度、位置及速度等敏感信息存在强相关性, 故在近场目标探测中具有独特优势; 另一方面, 绕流场流动规律与运动体表面材料特征弱相关, 该探测原理并不受目前水中声隐身技术发展的影响。因此, 基于该仿生原理的水下新型探测技术拥有广阔的研究与应用前景。
目前, 鱼类侧线仿生探测原理已逐渐被生物及水中探测领域的研究者们发现并重视起来, 相关问题在国内外已有初步研究。V. I. Fernandez基于仿生侧线试验论证了绕流场及尾涡流场信息探测水下目标的重要性[2]; 金永刚等分析了航行体水压场沿纵向和潜深的变化规律[3], 论证了以此探测水下目标的可行性; Y. C. Yang等人以模拟小型浮游生物运动频率带来的压力扰动为信息源, 论证了以运动获得压力信息来辨识目标特性的可行性[4]。上述研究工作均基于水中目标绕流场的规律研究论证了这种新型探测原理运用于水下探测的可行性, 但实现该探测原理所必须的目标特征信息与周围流动场信息之间的相关性及关联规则尚未建立。
本文基于鱼类侧线探测原理, 提出以目标扰动压力场为信息源的仿真模型, 研究目标特征信息与周围流动场信息之间的相关性及关联规律, 为进一步研究水下新型传感原理开拓思路。
1 生物模型
侧线器官广泛存在于鱼类和水生两栖类生物。当水流冲击鱼体时, 流体扰动引起的变化通过侧线管小孔中体液引起感官细胞兴奋, 将外界激励通过神经纤维传递到神经中枢。生物学家经过整理分析, 确认鱼类侧线管系统感受信息为水流信息; 工程学家分解水流振动信息时产生水流速场和水压力场2种不同侧重点。图1中圈内白点为鱼类侧线管, 自头部到尾部的数组侧线管组合成为鱼类侧线。观察可知线管单元分布位置均匀, 因此鱼类侧线可近似等效为等距水平分布的若干传感点阵列。
环境刺激来源于鱼体与外界环境的相对运动。相对运动产生的信息可分为鱼体运动自身绕流和鱼体自身绕流与外界环境相互作用产生流场新变化。例如, 鱼类的环境构建功能以其自身绕流为信息源, 通过产生的扰动来辨识和构建环境。综上所述, 对侧线的研究可以抽象为对运动体扰动水流信息的研究, 和对扰动水流同外界环境耦合产生新扰动信息的研究, 本文针对前者情况进行详细研究论证。

图1 鱼类侧线特征图
2 仿真模型
2.1 仿真建模
在已知鱼类侧线的生物原理上, 依据水下航行体外形, 应用Gambit建立几何模型并划分网格, 使用Fluent流体动力学软件进行数值计算。模型参量设置如下: 建立球头半径=50 mm, 弹体总长度=400 mm(依据细长体长径比及水下现役鱼雷通用长径比8:1)的单体模型; 圆心据传感点距离为; 水域长2 400 mm, 宽1 000 mm; 传感点位置参量,和水流速度为运动体目标特性参数。依据几何对称性将模型建立为2D轴对称半模型。计算时水流匀速流动而柱体静止不动, 通过改变观察坐标系来研究柱体在静止水域中匀速运动(如图2所示)。
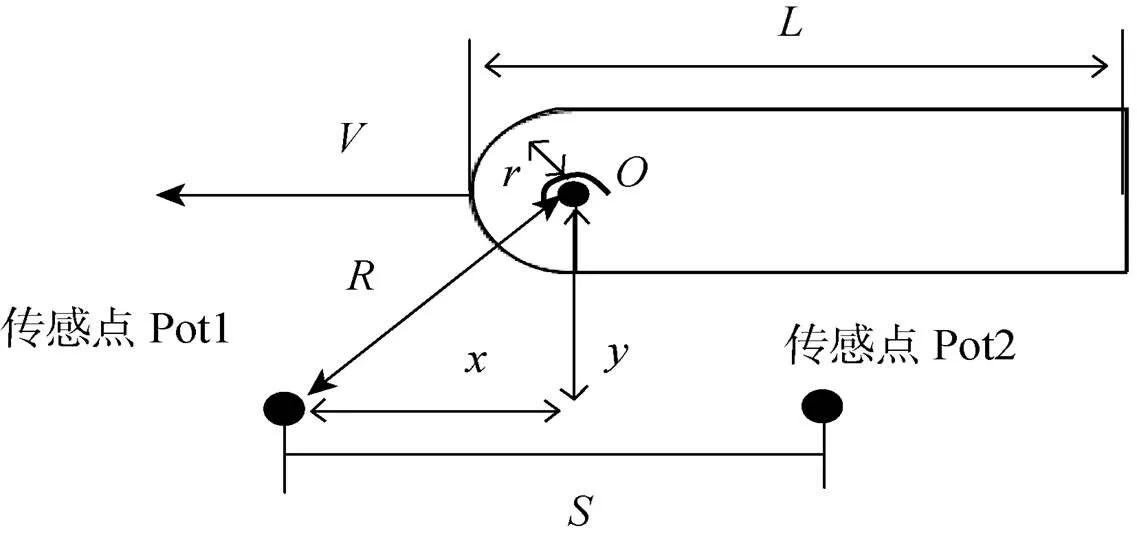
图2 研究模型示意图
2.2 边界条件
为真实模拟无限水域流场环境, 水域入口边界设为速度入口velocity-inlet, 出口边界设为压力出口pressure-outlet, 计算域对称边界设为轴对称axis。水域外壁面边界选择使用镜像symmetry, 以消除固壁面wall与速度入口velocity-inlet作用产生的误差, 定义该边界条件可模拟粘性流体在平滑壁面的运动过程。球头圆柱体壁面条件设置为无滑移边界条件wall, 在近壁面区域采用加强型壁面函数enhanced wall treatment。湍流计算模型选用重正化群模型(renormalization group, RNG)来计算。仿真采取非定常计算过程, 时间步长0.001 s, 计算时长5 s。根据研究需要设置如下工况变量: 1) 半径50 mm, 100 mm, 200 mm; 2) 速度1 m/s, 5 m/s, 10 m/s, 15 m/s, 20 m/s; 3) 长度300 mm, 400 mm, 550 mm。
观测点竖直距离与半径比例2︰1, 1︰1, 1︰2,通过上述变量相互组合共得135种计算工况, 图3为其中一种网格模型的边界条件。
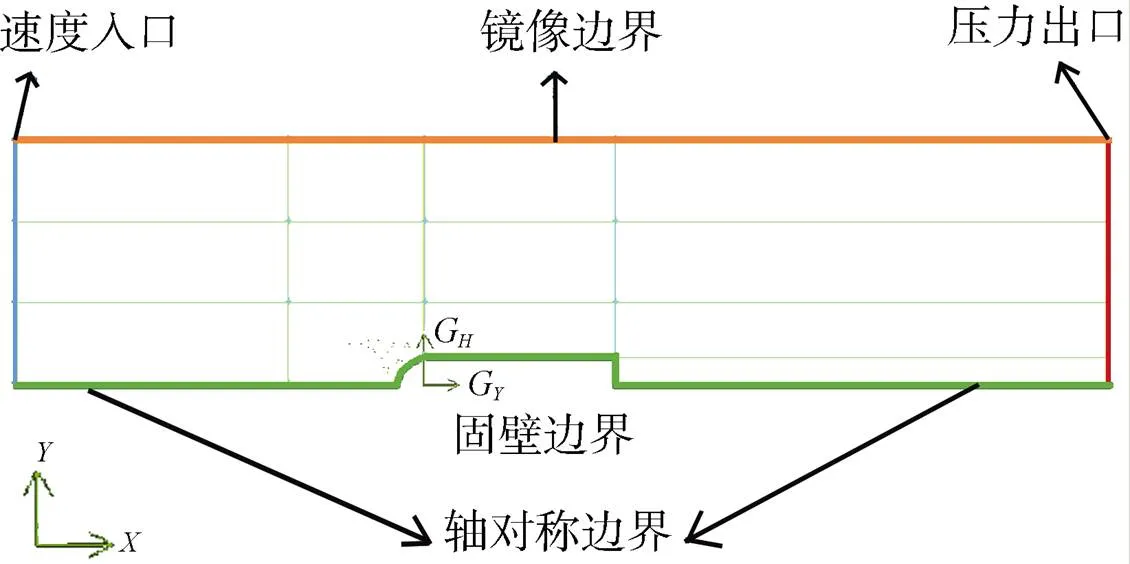
图3 仿真模型边界条件示意图
3 仿真结果与分析
图4是本文计算匀速运动的球头柱体附近某探测点的压力扰动曲线。
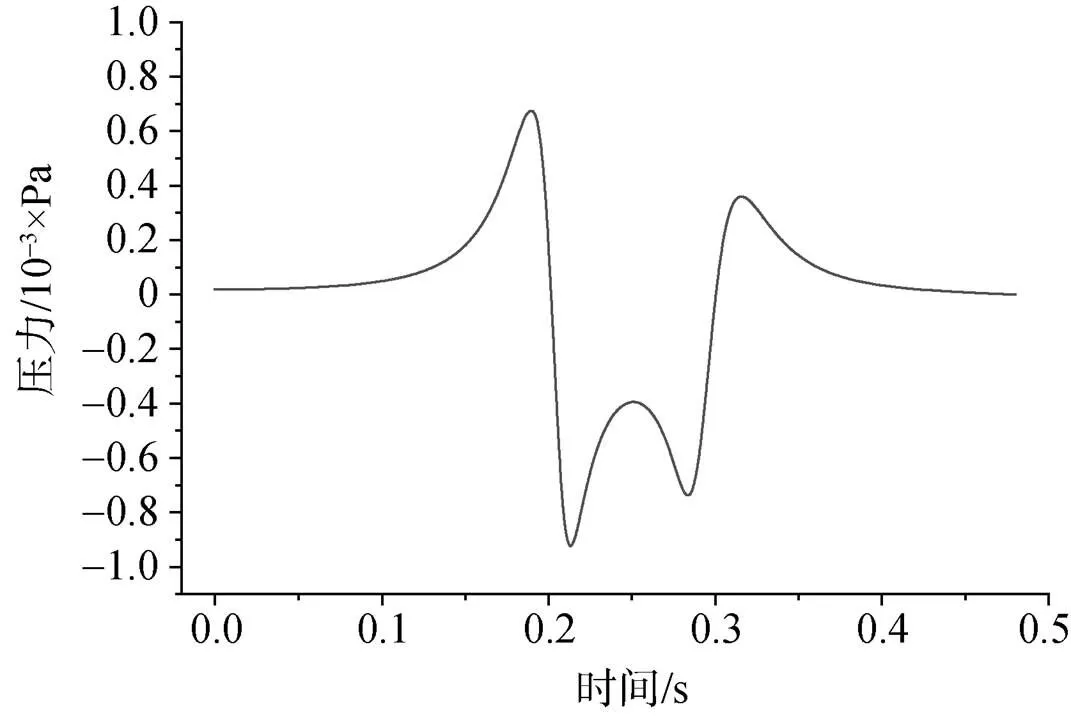
图4 运动圆柱体压力分布曲线
图中,测量零点时刻规定为网格模型中的=-1.1m处, 从该位置起传感点进行测量并绘制曲线。文献[2]计算了多种圆柱绕流模型并与试验结果对照(见图5)。图5与图4曲线=0.2 s到=0.25 s曲线规律相像, 曲线趋势均是以一定斜率升至峰值, 随即迅速降至谷值, 最终缓慢恢复至零压。但由于本文设计模型后半段为柱体, 因此压力并未恢复至零压处, 伴随新的规律而形成了类似前半段曲线镜像后的曲线图形。该曲线趋势印证了本文仿真计算的合理性, 决定了后续分析的正确性。

图5 多种模型下的圆柱绕流仿真对比图
3.1 球头柱体压力场规律
经过仿真计算获得了球头柱体绕流压力场云图(如图6), 根据不同特征可将压力场分为3个区域, 柱体头部Ⅰ区、侧壁Ⅱ区和尾部Ⅲ区。
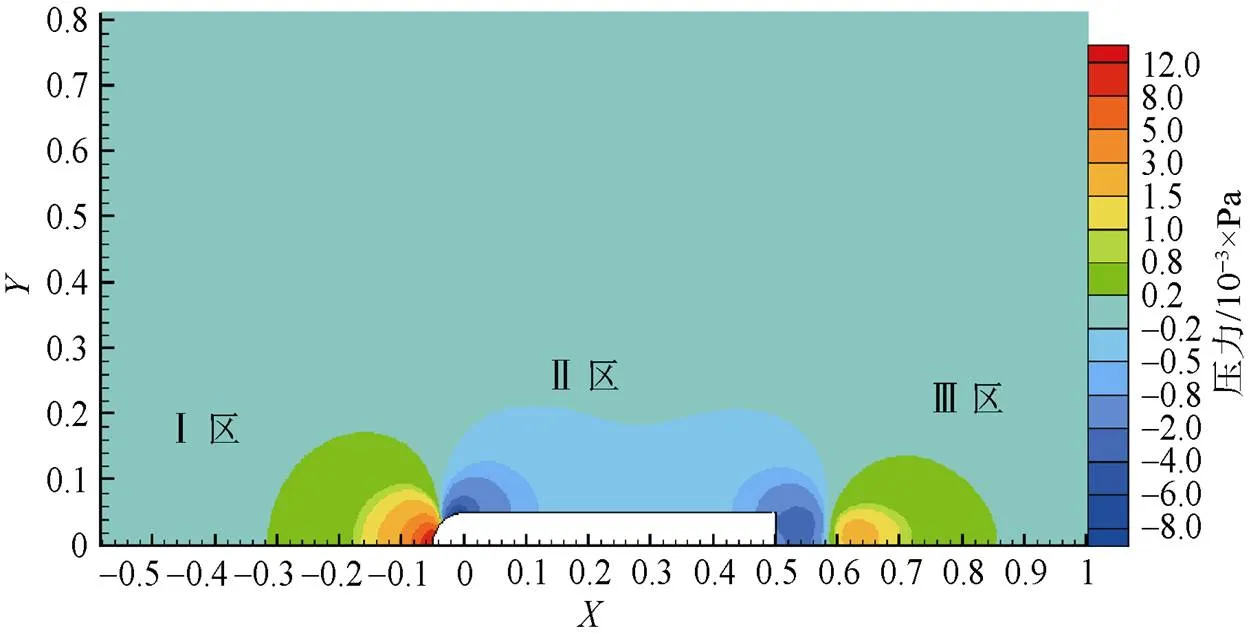
图6 圆柱体压力场扰动特征图
无穷远处水域=-0.5 m至球头柱体迎水面附近水中压力持续升高,至柱体驻点=-0.05 m附近达到峰值; 头部两侧水流因惯性向后方运动, 在头部两侧=0,=-0.05 m附近因高速运动产生负压区; 在柱体中段Ⅱ区侧壁水流自壁面处至边界层外缘再到无限水域, 水流速度由壁面的静止状态平缓恢复到无穷远处的匀速; 由于水介质粘性效应柱体尾部Ⅲ区边界层剥落形成涡旋, 从而形成了尾部负压区及高压区。
3.2 运动体参量对压力场影响规律
1) 速度参量对压力场信息的影响规律分析
当测得速度并与时间结合, 可将曲线横坐标改为位移量。根据图7所示, 在仅改变速度变量的前提下, 压力曲线形状仍符合W形。一次压力峰值、二次压力峰值、一次零交越点的横坐标位置大体不变, 但曲线头部、中部及尾部压力幅值有较大不同。随速度的增加, 压力峰值和谷值幅值增大, 曲线头尾斜率增大。根据伯努利方程可知, 在速度增大的情况下, 驻点处速度为零, 动能转化为内能压力增大; 水介质向后挤压, 能量转化为动能速度增大, 形成如图8曲线形状, 说明速度参量的变化主要是对压力特征点幅值的影响, 但对于压力特征点的位置影响变化并不大。
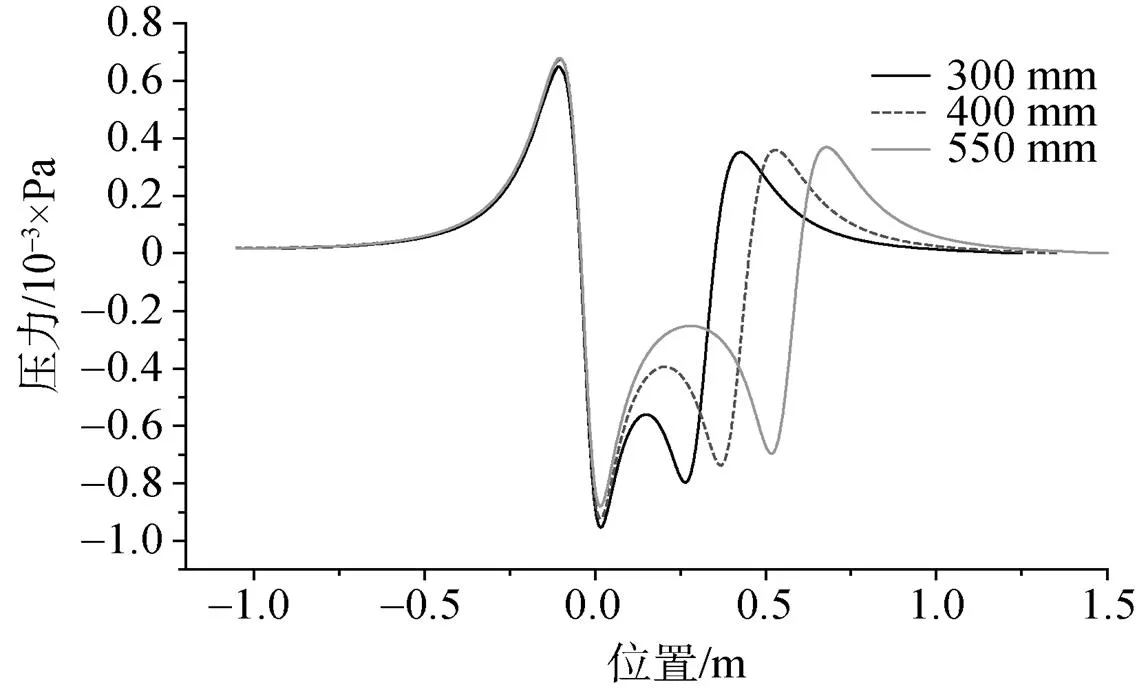
图8 不同柱体长度下压力分布曲线图
2) 长度参量对压力场信息的影响规律分析
在单一改变柱体长度维度参量时, 柱体压力曲线形状产生变化。如图8所示, 长度参量不同, 曲线W形状大体相同, 曲线头部形状和压力幅值大体相等; 随长度增大, 头部负压区Ⅰ区与尾部负压区Ⅲ区间隔距离的增加导致相互干扰效果减弱; 长柱体曲线中部压力恢复更接近零压。可推知: 当柱体长度增长时, 曲线头尾形状变化不大, 中部曲线压力值恢复程度较高, 直至恢复至零压力点; 当柱体长度不断减小时, 头尾负压区逐渐接近, 两者相互重合干扰, 压力曲线最终变成V型。结合图7、图8可知, 速度参量的变化和长度参量的变化所带来的曲线形状变化具有截然不同的特征, 因此可以轻易分辨2种不同参量变化时的区别。观察曲线可知, 可表征柱体头部驻点位置的压力点有第1次峰值压力降至零点的零交越点1、压力一次谷值点2; 可以表征柱体尾部压力特征点有二次压力谷值1和第2次零交越点2(见表1)。观察表中数据可知,1与1之间距离或2与2之间距离较符合柱体长度。

表1 压力特征点分布表
经计算两者存在一定误差, 而前者较小, 比较符合柱体真实长度。在一定观测范围内误差随着观测点距柱体数值距离的增大而减小; 当观测点距柱体数值距离较近时, 观测点靠近柱体边界层, 其中流体特征紊乱, 导致误差较大。通过该方法获得的柱体长度与真实长度如表2所示。
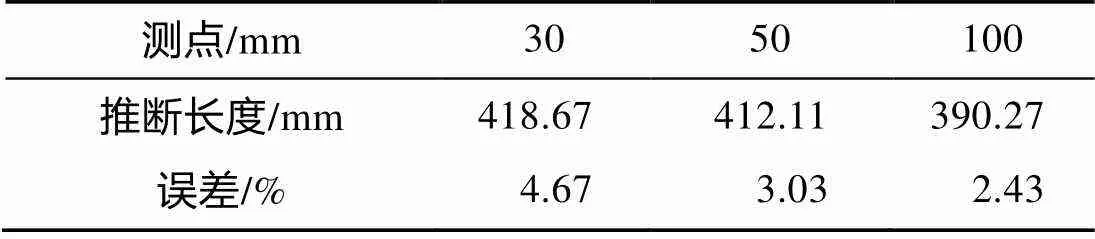
表2 不同观测距离下柱体长度估算表
经仿真计算可知, 柱体长度增加时, 头部扰流区域与尾部扰流区域分离开来, 这时所测得的压力特征更为明晰, 因此误差随着长度的增加而减小; 而当柱体长度减小时, 头部扰流区域与尾部扰流区域产生重叠, 压力特征受干扰计算长度误差增大。
参照目前水下武器及航行体长径比, 7︰1以下长径比航行体较少, 故不在此讨论; 随观测点距离变化, 纵向接近1倍半径距离观测点计算所得长度较精确, 超过该数值误差逐渐增大; 在速度变化情况下, 误差随着速度的增加而减小。但随着速度的增大幅度过大, 柱体周遭压力扰动区域变大, 压力特征区之间相互混叠, 导致小模型条件下过大速度估算结果失准。综上所述, 该方法在速度、长度和观测距离变化时仍适用。
3) 直径参量与观测点距离耦合关系分析
根据上述两小节分析可以知道, 通过以压力曲线的特征点位置为坐标系设置基准, 可绘出该柱体的坐标系。若以压力零交越点为零点, 观测点的横坐标可以通过测量时间、速度及原点位置算得

纵向半径信息和观测点纵坐标信息耦合在压力曲线中。半径与观测距离成一定比例时(如图7), 不同半径下压力曲线形状大致相同。相同比例不同半径时, 一次峰值和一次谷值数值大体相同。同时, 一次压力峰值至一次压力谷值的斜率也高度相似。上述说明半径参数和观测点纵坐标参数存在强耦合关系, 因此通过公式推导圆柱绕流某点处压力及速度之间关系, 尝试解析该耦合关系的规律。
首先由势流理论可知复变解析函数
根据势流理论Newman在基础圆柱绕流模型上提出兰金半体与偶极子混合修正模型[5]
通过上述推导可将绕流模型分解如下

推得某压力点处的径向流速和圆周向流速
根据伯努利方程知

根据式(9)可知, 当速度和柱体半径一定, x坐标已知条件下, 观测点纵向坐标y与球头半径R成一定比例关系。如图9所示, 因长度不同, 经过对横坐标归一化处理, 可使不同长度的曲线更直观地在统一标准下显示。图中为3种不同观测距离比例和3种不同半径结合共9条压力曲线。可以看出, 在拥有比例条件下, 曲线的形状、尺度、幅值和斜率都大体相同, 而不同比例下的曲线拥有较大差异。距离柱体较近的压力扰动幅值较大, 较远时压力扰动小, 可以很直观地看出其中的区别。

图11 观测距离与半径1︰2下压力分布曲线
4 结论
基于鱼类侧线的环境信息感知原理, 针对水中运动目标特征参量对绕流场的影响规律进行了仿真研究, 得到了运动体特征信息和流场信息的关联规律, 获得了如下结论。
1) 水中运动体目标特性(如速度、尺寸、距离等)与运动体周遭绕流场特征参量存在强耦合关系; 从理论上通过分析绕流场特征参量来反推运动体目标特性具备可行性。
2) 水中运动目标的速度和长度参量与流场中测点压力曲线形状和峰值、谷值特征点位置直接对应; 目标距离参量和半径参量的耦合与压力曲线峰值、谷值以及零交越点附近曲线斜率直接相关, 该耦合关系表达为无量纲比例关系和。
3) 观测点纵坐标参量和半径参量存在强耦合, 仅靠测点压力场信息无法分析解耦, 还需引入其他信息的测量或处理方法。
[1] 朱元鼎, 孟庆闻. 中国软骨鱼类的侧线管系统及罗伦瓮和罗伦管系统的研究[M]. 上海: 上海科学技术出版社, 1980.
[2] Fernandez V I. Performance Analysis for Lateral-line-ins- pired Sensor Arrays[D]. Massachusetts: Massachusetts In- stitute of Technology, 2011.
[3] 金永刚, 张志宏, 顾建农, 等. 大深度水下航行体引起的水底压力变化[J]. 武汉理工大学学报(交通科学与工程版), 2013, 37(5): 1098-1101. Jin Yong-gang, Zhang Zhi-hong, GU Jian-nong, et al. Pr- essure Variation on Sea Bottom Caused by Vehicle Deep in Sea[J]. Journal of Wuhan University of Technology, 2013, 37(5): 1098-1101.
[4] Yang Y, Chen N, Tucker C, et al. From Artificial Hair Cell Sensor to Artificial Lateral Line System: Development and Application[C]//Proceedings of the 20th IEEE International Conference on Micro Electro Mechanical Systems (MEMS′07). Urbana, 2007: 577-580.
[5] Newman J N. Marine Hydrodynamics[M]. Cambridge Massachusetts: MIT Press, 1977.
(责任编辑: 杨力军)
Principle of Biomimetic Detection Based on Flow Field Information of Underwater Moving Object
MA FengZHANG Jing-xiaoJIA Xi-yuLU XiWANG Shu-shan
(College of Mechatronics, Beijing Institute of Technology, Beijing 100081, China)
Fish lateral line explores water flow information on the purpose of environment perception and recognition. It inspires a new development direction to underwater detection technology. Based on the biomimetic detection principle of the lateral line, this study focuses on the detection principle of a moving object by taking the flow field around the object as information source. A round-head-cylinder simulation model is established to reveal the relation between the features of underwater moving object and the characteristic parameters of flow field by combining potential flow theory with simulation. Thus, the characteristic parameters corresponding to velocity, length, radius, and observing point information of a moving object are obtained through the calculation of peak value, valley value and slope of the relation curves. Moreover, the possibility to conduct biomimetic detection of an underwater moving object by making use of the flow field information around the object is discussed.
fish lateral line; flow field; biomimetic detection; potential flow theory
TJ630.34; Q692; TP701
A
1673-1948(2014)06-0436-06
2014-10-20;
2014-11-09.
马 峰(1973-), 男, 博士, 副研究员, 主要研究方向为武器系统总体技术.
