往复机的改进设计
2014-02-11武威
武威
(广东白云学院机电工程学院,广东广州 510450)
往复机的改进设计
武威
(广东白云学院机电工程学院,广东广州 510450)
通过分析一些喷涂往复机存在的缺陷,选择最佳方案,设计参数,利用三维建模进行结构优化,设计喷涂往复机机械手的总体结构,设计PLC控制简图,并进行模拟仿真,实现往复机的改进设计。
往复机;PLC;改进
0 引言
往复机是涂装主要的表面处理设备,无论是大型产品还是小型精密产品都可以运用各种功能的往复机进行表面处理,而且还有自动除尘功能,被广泛应用于船舶、机电、汽车、建材和文教卫生及人们日常生活所需的各种工具的生产制造。而现有大部分往复机不能合理实现喷涂工作,因此,本设计考虑改进现有往复机结构,实现优化。
1 系统设计
系统设计主要包括方案的选择、硬件和软件设计。
1.1 设计方案[1]
目前大多数喷涂作业的往复机机构上存在缺陷,限制着表面处理速度,如图1(a)、(b)所示,公转与自转联动型存在单一但经济的特点,多机并联跟随型虽然高效,但价格比较昂贵,而自转输送型具有高效、经济、多工位的优点,如图1(c)所示,因此方案c更适合喷涂作业。
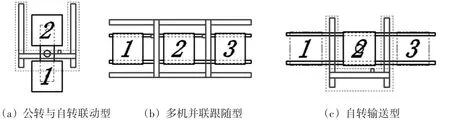
图1 机械手机构方案图
驱动方案有三种[2]:
方案一:利用凸轮带动各轴移动;
方案二:利用无杠气缸带动,或液压缸带动各轴移动;
方案三:通过PLC控制伺服电机带动各轴移动。
根据所考虑的三种方案,PLC控制电机方便灵活,因此本文驱动设计选用方案三来实现。
1.2 往复机的组成
往复机主要包括机身、机械手、输送装置、十字转台四个部分。整体结构图如图2所示。
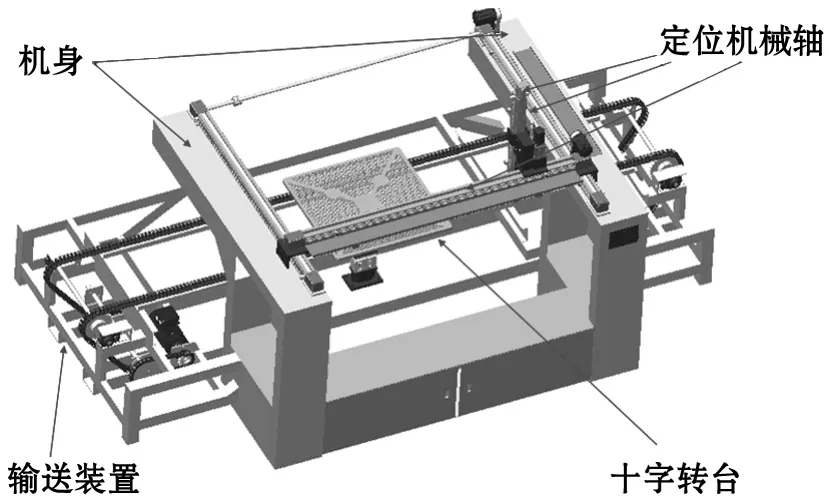
图2 往复机结构图
1.3 往复机的工作要求
设计往复机机械手要注意各轴配合的垂直度和平行度,所以机械手基座的水平要求比较高,水平配合部分粗糙度比较小。由于往复运动频率比较高,常常会产生频繁的冲击性,因此往复速度不宜过大,尽量避免大惯量电机的选择。此设备必须拥有加工多样性,应适合各种不同产品的处理要求,并分析设备的实际应用经济性,可以从控制要求和结构设计中减少不必要的成本。
为了保证设备在最佳的使用状态,延长设备的使用寿命、降底故障率、提高产能,供电要求运用单相220 V,交流50 Hz电源,供电功率≥4 kW,电压波动≤10 V。Z轴编程时喷枪高度必须高于工件高度。输送带支撑重量不超过50 kg[3]。
1.4 往复机机械轴设计
1.4.1 HIWIN直线导轨的设计[4-5]
HIWIN直线导轨定位精度高,磨耗少,能长时间维持精度,适用高速运动且大幅降低机台所需驱动马力,可同时承受上下左右方向的负荷,组装容易并具互换性。直线导轨的结构如图3所示。
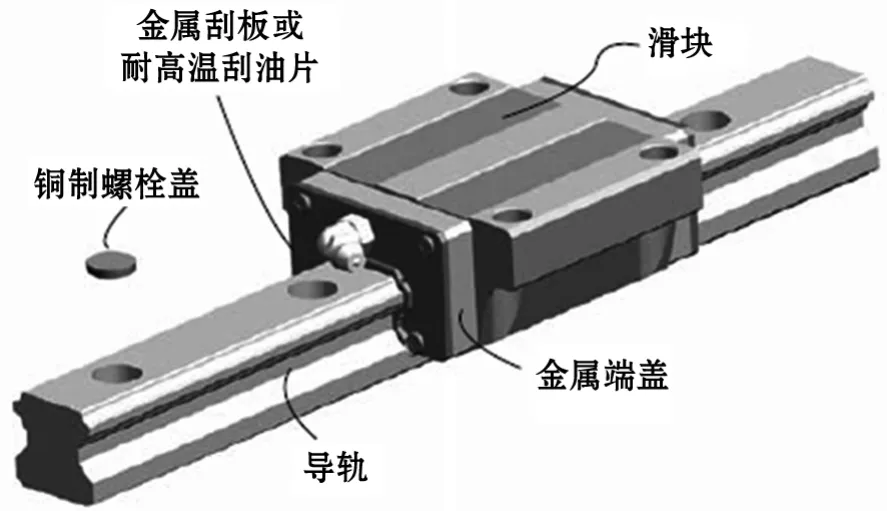
图3 HIWIN直线导轨
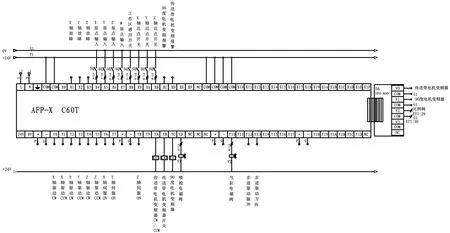
图4 PLC控制电路简图
2.4.2 传动电机的设计[6]
根据参数设计要求,计算确定X轴、Y轴伺服电机分别选择中惯量电机MDMA系列的1 kW电机、750 W电机;Z轴选择小惯量电机MQMA系列的400 W电机,同时选择传动比为7.5的NMRV040输入法兰型减速器;传送带电机选择GTHSZ-B-750-3-D-B电机;工作台电机设计选择普通30 W电机就可以实现要求。
1.5 软件设计
1.5.1 PLC控制接线电路简图
PLC控制是软件核心,电路接线尤为重要,控制驱动电机的每个接口分配如图4所示[7-9]。1.5.2软件流程图设计[7]
PLC编程流程图如图5所示。控制有两种方式,分为手动和自动控制。手动包括对各个轴向的控制。
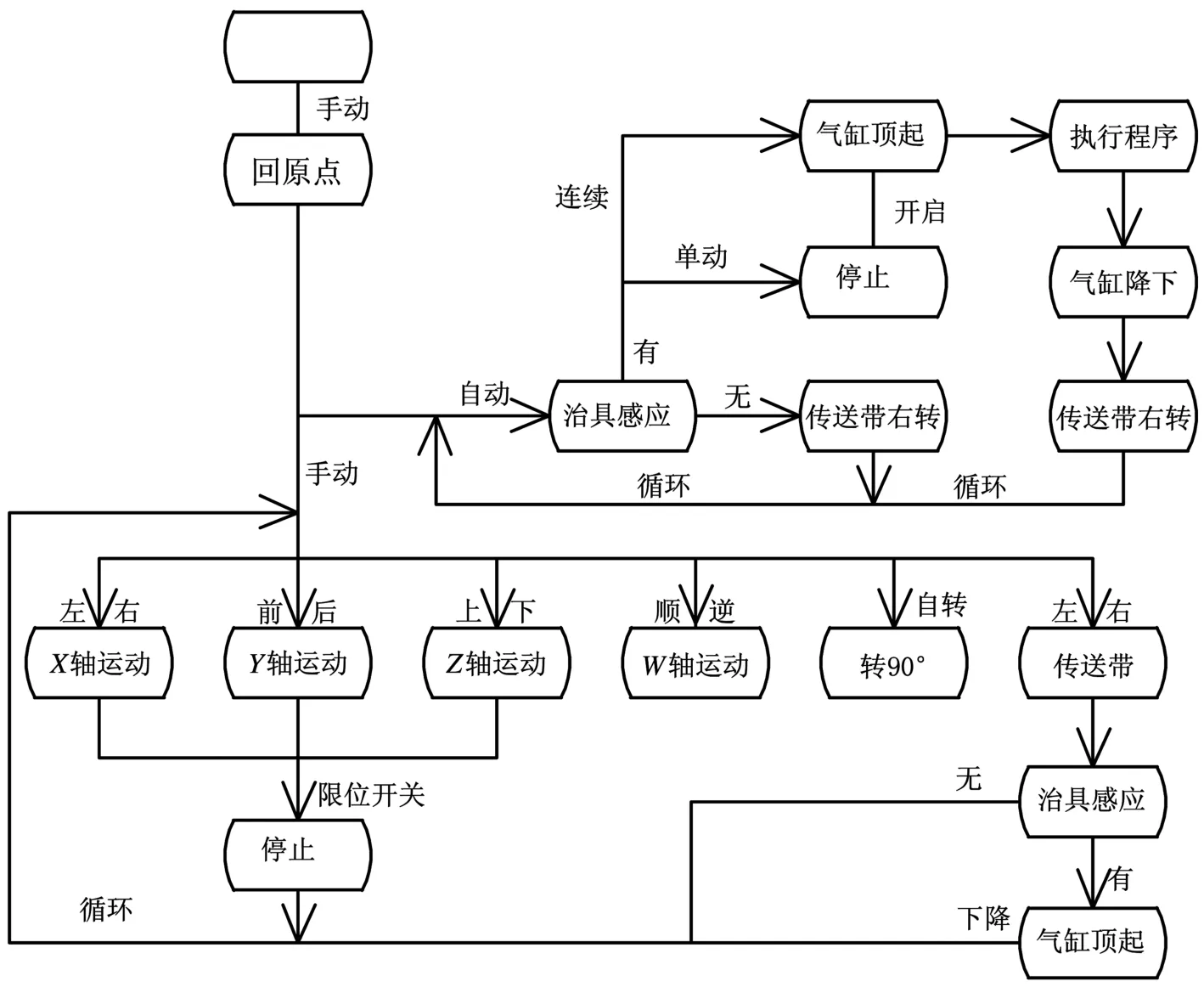
图5 流程图
2 结论
本设计利用仿真模拟,可以达到基本要求,可以实现往复喷涂工作。通过对普通往复机工作机构的三维建模及结构优化分析为企业的工业自动化生产过程实践提供理论设计基础,同时也为今后进行较经济、合理性的开发设计或工程性能优化打好基础。
[1]罗天洪,熊小辉.六自由度重载装配机械手运动学分析及求解[J].重庆交通大学学报:自然科学版,2009,28(6):1126-1130.
[2]董茂起,于复,王雪,等.基于S7-200 PLC的三自由度机械手控制系统设计[J].液压与气动,2010(8):62-63.
[3]李昌辉.自动上料机器人系统开发[D].哈尔滨:哈尔滨工业大学,2009.
[4]刘宇红,张明路,孟宪春,等.移动机械手的稳定性及补偿方法现状与发展趋势[J].机电产品开发与创新,2008,21(2):5-7.
[5]李桂莉,武洪恩,刘志海.搬运机械手的运动学分析[J].煤矿机械,2007,28(2):62-65.
[6]耿丽清,崔世钢,廉正光,等.医用服务机械手的运动学建模及控制[J].机床与液压,2008,36(4):311-313.
[7]陈志权.基于PLC气动机械手的控制系统[J].兵工自动化,2008,27(4):83-84.
[8]孙迎远.PLC在气动机械手中的应用[J].煤矿机械 , 2008, 29(9):151-152.
[9]张淑红,王熙雏.基于PLC的机械手物料分选装置的控制[J].机械与电气,2010(12):53-55.
Improvement Design of Reciprocator
WU Wei
(Electro-Mechanical School,Guangdong Baiyun University,Guangzhou510450,China)
By analyzing the defects of the spraying reciprocators,the paper chose the best option,designed parameters,and optimized the structure by 3D modeling.The overall structure of spraying reciprocator and the PLC control diagram was designed,and simulation was done.Improvement in design of reciprocator was realized.
reciprocator;PLC;improvement
TP29
:A
:1009-9492(2014)12-0222-03
10.3969/j.issn.1009-9492.2014.12.057
武 威,女,1984年生,黑龙江齐齐哈尔人,硕士,讲师。研究领域:机电智能检测与控制技术,虚拟仪器。已发表论文8篇。
(编辑:王智圣)
2014-07-11
