基于有限状态机的五桥臂逆变器改进调制策略
2014-01-25梅杨易子琛王立朋李正熙
梅杨, 易子琛, 王立朋, 李正熙
(北方工业大学电力电子与电气传动工程研究中心,北京100144)
0 引言
在电力机车、电动汽车、纺织等工业生产领域中往往需要两台或多台电机协同工作[1]。研究表明如果将一个桥臂公用,则五桥臂逆变器可用于驱动两台异步电机同时独立运行[2]。相比于传统的双逆变器分别驱动两台异步电机的调速系统结构,采用五桥臂逆变器不仅可以降低系统硬件成本,而且可以作为传统双异步电机调速系统的容错运行模式,以提高双异步电机调速系统的可靠性。
由于有公共桥臂的制约,五桥臂逆变器的调制策略不能直接沿用传统的空间矢量脉冲宽度调制(space vector pulse width modulation,SVPWM)[3-5]。目前广泛采用的是由文献[6]提出的调制方法,即将逆变器的每个控制周期均分为两段,分时对两台电机进行空间矢量脉宽调制,但该方法电压利用率较低。对此文献[7]提出了一种提高五桥臂逆变器电压利用率的方法,改善了五桥臂逆变器电压利用率较低的不足。但在上述调制方法中,每次开关状态的切换均需要通过多个开关的同时动作来实现,然而实际的电力电子器件并非理想开关器件,每个器件在开通或关断时均存在一定的延时,且延长时间不完全相同,另外控制信号传输到每个开关器件的时间也很难保证绝对同步。因此在采用上述调制方法时,五桥臂逆变器在开关状态切换时刻往往会出现错误的电压脉冲,使得输出线电压含有大量的反向电压脉冲,从而引起高频谐波畸变,同时带来比较严重的电磁干扰,给电机调速系统的稳定运行带来巨大危害。目前国内外关于五桥臂逆变器的文献中鲜有关于输出电压波形优化的研究。
针对这一问题,本文借鉴有限状态机(finite state machine,FSM)理论,提出一种基于有限状态机的五桥臂逆变器改进调制策略,通过限制并优化开关状态分布,尽量避免多开关的同时切换,使得任意时刻最多只有两个桥臂的开关同时动作,以减小五桥臂逆变器的反向电压脉冲,改善输出线电压质量。
1 五桥臂逆变器的拓扑结构
五桥臂逆变器的拓扑结构如图1所示。从图中可以看出一个五桥臂逆变器包含五个桥臂共10个开关器件 Sij(i=1,2,3,4,5;j=1,2)。其中图中 Si1与Si2组成第i号桥臂;j=1代表上桥臂的开关器件,j=2代表下桥臂的开关器件。Sij采用IGBT或MOSFET等全控型开关器件。传统的双逆变器并联结构中,2个三相逆变器并联共有6个桥臂12个开关器件。与之相比五桥臂逆变器节省了2个开关器件,可以有效的降低系统的复杂程度、减小系统体积,电路结构更加紧凑。
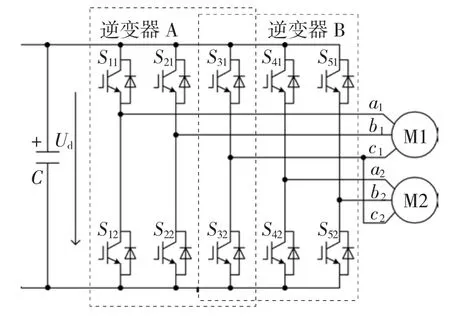
图1 五桥臂逆变器的拓扑结构Fig.1 Topology of the five-leg inverter
M1与M2为2台三相交流异步电机,M1的a1、b1和c1三相分别连接到1号、2号和3号桥臂,M2的a2、b2和c2三相分别连接到4号、5号和3号桥臂。即3号桥臂作为公共桥臂同时连接到2台电机。为便于后文分析,将逆变器的5个桥臂分为两组:1号、2号、3号桥臂记为逆变器A,输出的三相电用来驱动M1;3号、4号、5号桥臂记为逆变器B,输出的三相电用来驱动M2。C为电解电容,是直流母线电压Ud的滤波环节。
2 已有的五桥臂逆变器调制策略
2.1 传统的PWM调制策略
假设两台电机的电压空间矢量Ur1和Ur2在同一坐标系内相互独立并分别以角速度ω1与ω2运动,如图2所示。
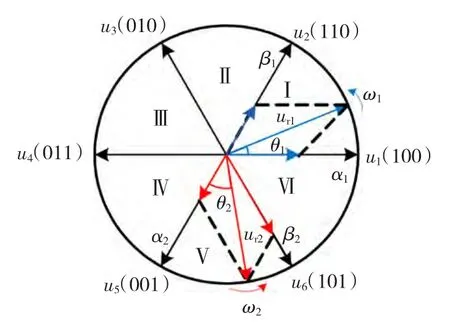
图2 两台逆变器的电压矢量合成Fig.2 Voltage space vector synthesis of the two inverters
如果要实现M1与M2的独立控制,必须对五桥臂逆变器的每一个桥臂进行独立控制。由于逆变器A与逆变器B有一个公共桥臂,如果直接采用传统三相电压逆变器的SVPWM算法,则公共桥臂无法同时满足两台逆变器的开关状态要求。因此在五桥臂逆变器的控制策略中,往往将一个采样周期均分为两段,分时对两台逆变器进行调制,即在前半个采样周期内逆变器A直接采用SVPWM技术进行调制,逆变器B保持在零矢量状态,此时段内4、5号桥臂开关状态始终与3号桥臂保持一致。后半个采样周期与之相反,即逆变器B直接采用SVPWM技术进行调制,逆变器A保持在零矢量状态,此时段内1、2号桥臂开关状态始终与3号桥臂保持相同状态。这样在一个采样周期内逆变器A与逆变器B可以交替工作而互不影响,从而实现两台电机的独立控制。
以图2所示的状态为例,即逆变器A与逆变器B的电压合成矢量分别位于第I与第V扇区,五桥臂逆变器在一个采样周期内的电压矢量分布以及开关状态变化如图3所示。其中α1和β1为合成逆变器A输出电压矢量的2个相邻非零电压矢量。α2和β2为合成逆变器B输出电压矢量的2个相邻非零电压矢量。图中 dα1、dβ1、d01、dα2、dβ2和 d02分别为对应各段电压矢量的占空比。
从图3中可以看出两台逆变器在零矢量的切换时刻常常需要3个桥臂的开关器件同时动作,由于电力半导体器件的非理想特性,开关状态切换时器件会出现先后不同步动作,使得逆变器输出线电压出现瞬时的错误甚至反向。由于每个采样周期内均存在多个零矢量切换需求,因此输出线电压将富含大量的反向电压脉冲,引起高频谐畸变和电磁干扰。该调制策略中一个采样周期内的电压矢量和开关状态数较少,无法通过调整电压矢量分布来避免3个桥臂开关同时动作的情况,因此反向电压脉冲难以克服。

图3 电压矢量分布及开关状态(传统PWM调制策略)Fig.3 Voltage vector distribution and switch states(conventional PWM strategy)
2.2 提高电压利用率的PWM调制策略
文献[7]在传统PWM调制策略的基础上进行了改进,对各电压矢量的分布重新进行了调整,利用两台逆变器零矢量的交叠时间,对原本处于零矢量的逆变器进行SVPWM调制,以提高五桥臂逆变器的电压利用率。仍以图2所示状态为例。五桥臂逆变器在一个采样周期内的电压矢量分布以及开关状态如图4所示。其中 α1、β1、α2和 β2的选取原则与传统PWM调制策略完全一致。
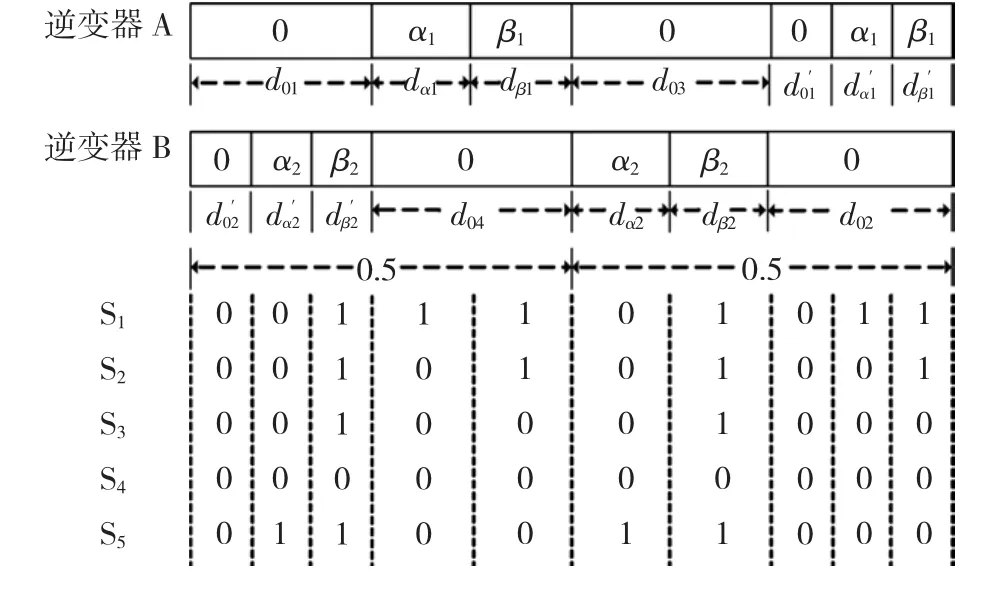
图4 电压矢量分布及开关状态(提高电压利用率的PWM调制策略)Fig.4 Voltage vector distribution and switch states(the modulation strategy for voltage transfer ratio enhancement)
从图中可以看出采用这种调制策略仍然存在3个桥臂的开关同时动作的情况,因此逆变器输出的线电压中也将存在大量的反向电压脉冲。如要抑制这些反向电压脉冲,则需对电压矢量分布进行限制和调整。由于该调制策略中一个采样周期内包含的电压矢量合开关状态数量较多,零矢量的选择也更加灵活,因此考虑通过对各电压矢量的分布进行调整优化来减少或抑制多个桥臂的开关同时动作。
3 基于有限状态机的PWM调制策略
在提高电压利用率的PWM调制策略基础上,本文提出了一种基于有限状态机的PWM改进调制策略,对五桥臂逆变器的电压矢量进行了调整优化。以减少反向电压脉冲,优化输出线电压波形。
3.1 有限状态机
有限状态机(finite state machine,FSM)是表示有限个状态以及在这些状态之间的转移和动作等行为的数学模型。一个FSM包含有限个状态,但在任何时刻只能处于给定状态中的一个。系统的状态变化受事件的驱动,事件是系统的活动或外部输入信号,它受当前状态所约束[8]。有限状态机的下一个状态和输出是当前状态和输入的函数。FSM只能根据状态机当前所处的状态以及输入信号从一个状态转移到另一个状态。
由于电力电子器件只存在导通和关断2种状态,电力电子电路和设备的控制主要是控制器件导通/关断的顺序和时间,每一种器件通断状态对应于电路的一种工作状态。因此,可以根据电路结构,将电力电子电路的这些特定的工作状态组合成一个具体的有限状态机,通过对不同状态转移条件的控制来实现对电力电子电路的控制[9-10]。可见FSM几乎可以用于所有电力电子电路的控制。
五桥臂逆变器驱动双异步电机调速系统是一个需要实时控制的系统,由于五桥臂逆变器的开关状态较多,相应的工作状态较多,必须对这些工作状态的时间和顺序进行系统合理的规划安排才能达到良好的控制效果,因此本文引入有限状态机理论,提出了一种五桥臂逆变器改进调制策略,调整优化逆变器的电压矢量和开关状态分布。
3.2 基于FSM的PWM调制策略
根据五桥臂逆变器的拓扑结构可知,五桥臂逆变器共包含5个桥臂有25=32种开关状态。因此五桥臂逆变器可以看作25维的有限状态机,驱动状态转移的事件是电压矢量的切换。但是电路工作不会历遍所有状态,而是沿着状态空间的某条轨迹运动。根据五桥臂逆变器的开关规律,逆变电路只有14种有效工作状态,如表1所示。五桥臂逆变器将在I1~I14共14个有效工作状态之间切换。

表1 五桥臂逆变器的有效工作状态Table 1 Effective work states of five-leg inverter
根据提高电压利用率的PWM调制策略,每个采样周期内共有10个开关状态,且不同采样周期的开关状态不同,因此首先根据输出电压矢量的位置,从I1~I14中挑选出相应的10个工作状态,然后根据每次状态切换开关次数最小的原则,合理安排这些工作状态的顺序,设计状态转移轨迹图。以两台逆变器均处于第一扇区为例,得到一个采样周期内FSM的状态转移轨迹,如图5所示。
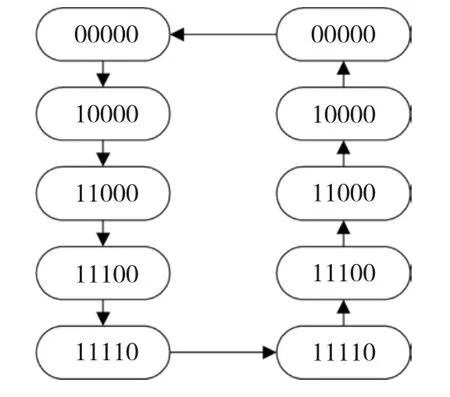
图5 FSM转移轨迹图Fig.5 Track of state conversion of FSM
从图中可以看出,FSM每次状态切换只有一位发生变化,即五桥臂逆变器每次开关状态切换均只有1个桥臂的开关动作。这种状态转移轨迹符合SVPWM技术中每次开关状态切换开关次数最小的原则,有效避免了多个开关同时动作的情况。与之对应的五桥臂逆变器电压矢量分布及开关状态如图6所示。从图中可以看出两台逆变器在整个采样周期中的每次开关状态切换时刻均只有1个桥臂的开关动作。
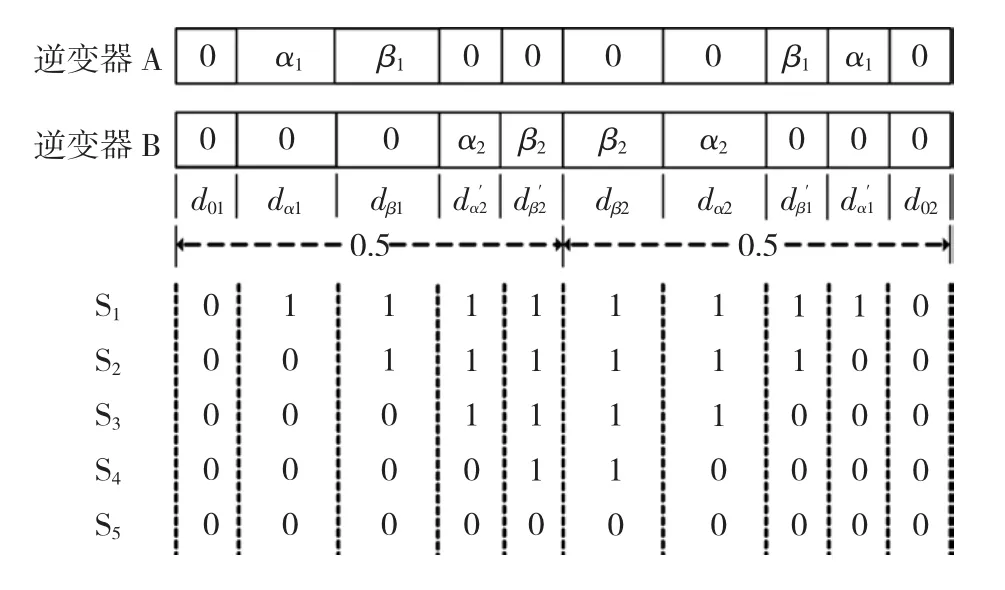
图6 电压矢量分布及开关状态(基于FSM改进调制策略)Fig.6 Voltage vector distribution and switch states(the improved modulation strategy based on FSM)
每台逆变器的输出电压矢量位置被划分成6个扇区,故五桥臂逆变器的输出电压矢量位置存在36种扇区状态,在其它各扇区状态下,同样可以通过上述改进调制策略来调整优化输出电压矢量。不过在某些扇区中,由于缺乏过渡状态,不论采用何种转移轨迹,都不能完全避免多个开关的同时动作,但采用该调制策略可以完全消除3个桥臂的开关同时动作,并尽量减少2个桥臂开关同时动作的次数。从而减少输出线电压反向电压脉冲,抑制避免高频谐波畸变和电磁干扰,维持调速系统的稳定运行。
4 实验研究
为验证本文提出的调制策略,本文在一台5 kW的五桥臂逆变器样机上进行了实验验证。样机包括主电路、控制电路、调理电路、辅助电源、2台三相异步电机等主要组成部分,如图7所示。实验中两台电机参数完全一致如表2所示。实验中直流母线电压给定50 V,2台逆变器输出频率设定值均为30 Hz,空载运行。

图7 五桥臂逆变器实验样机Fig.7 Experimental prototype of five-leg inverter
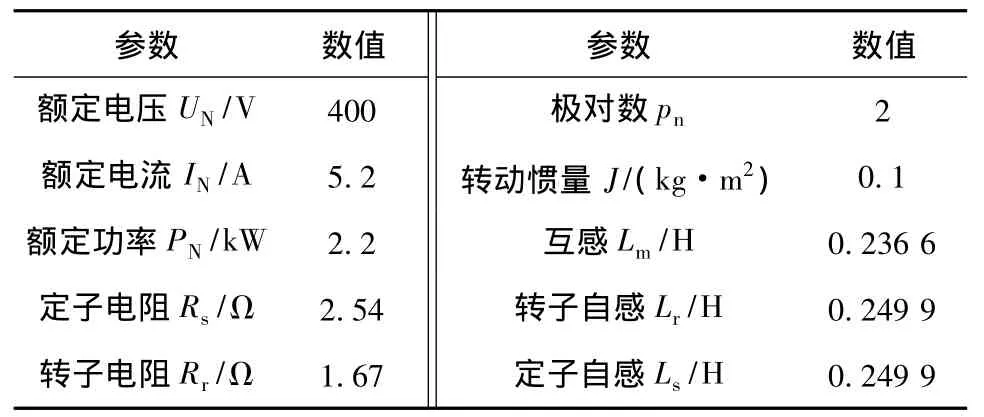
表2 电机参数Table 2 Motor parameters
实验中首先验证了多个开关同时动作对逆变器输出线电压造成的影响,如图8所示。图中Sa1、Sb1和Sc1分别逆变器A三相的驱动波形,Uab1为逆变器输出的线电压。图中Sa1、Sb1和Sc1的波形一致,但由于开关器件的非理想特性和控制信号传输的延时,使得它们的上升沿存在微小的时间差,相应地,此时Uab1上出现了一个明显的电压脉冲。

图8 反向电压脉冲的产生Fig.8 The generation of reverse voltage pulses
图9为采用提高电压利用率的PWM调制策略时,两台逆变器的输出相电流、线电压波形和逆变器A线电压Uab1的FFT。从图中可以看出2台逆变器的输出线电压中均含有大量的反向电压脉冲,线电压的波形较差。根据线电压的FFT分析结果可以看出,逆变器输出线电压高次谐波集中在5 kHz附近且幅值较大。

图9 提高电压利用率PWM调制策略的实验结果Fig.9 Experimental results(the modulation strategy for voltage transfer ratio enhancement)

图10 基于FSM改进调制策略实验结果Fig.10 Experimental results(the improved modulation strategy based on FSM)
图10 为采用基于FSM改进调制策略时,2台逆变器的输出相电流、线电压波形和逆变器A线电压Uab1的FFT。从图中可以看出两台逆变器输出线电压的反向电压脉冲有了显著减少。由线电压FFT分析结果可知,输出线电压的高次谐波也显著减少,5 kHz附近高次谐波幅值减小为原来的1/4,高频谐波畸变减少使得电压质量有了明显改善。但是,图中线电压中仍存在极少量的电压脉冲,这是由于基于FSM改进调制策略中未能完全消除2个开关同时动作而产生的。
5 结语
本文针对五桥臂逆变器输出线电压波形较差、含有大量的反向电压脉冲这一问题,提出了一种基于有限状态机的PWM调制策略。该调制策略通过限制并优化五桥臂逆变器的电压矢量分布,尽量避免多个桥臂开关的同时切换,从而抑制输出线电压的反向电压脉冲。实验结果表明,采用该调制策略的五桥臂逆变器可以驱动2台异步电机分别独立稳定运行,逆变器输出线电压的反向电压脉冲显著减少,电压波形质量有了明显改善。
[1]JAIN M,WILLIAMSON S S.Modeling and analysis of a 5Vleg inverter for an electric vehicle in-wheel motor drive[C]//Electrical and Computer Engineering(CCECE),May 2-5,2010,Calgary,Alberta,Canada.2010:1 -5.
[2]OKA K,NOZAWA Y,MATSUSE K.Improved method of voltage utility factor for PWM control method of five-leg inverter[C]//Power Electronics Specialists Conference,June 18 - 22,2006,Jeju,Korea.2006:1-5.
[3]赵文祥,刘国海,吉敬华,等.基于DSP的全数字矢量控制SVPWM变频调速系统[J].电机与控制学报,2004(2):175-178.ZHAO Wenxiang,LIU Guohai,JI Jinghua,et al.The digital vector-controlled SVPWM variable frequency speed-adjustable system based on DSP[J].Electric Machines and Control,2004(2):175-178.
[4]张春喜,廖文建,王佳子,等.异步电机SVPWM矢量控制仿真分析[J].电机与控制学报,2008(2):160-163.ZHANG Chunxi,LIAO Wenjian,WANG Jiazi.Simulation analysis in SVPWM vector control for asynchronous motor[J].Electric Machines and Control,2008(2):160 -163.
[5]王晓刚,谢运祥,黄少辉,等.四桥臂逆变器SPWM和SVPWM的归一化研究[J].电机与控制学报,2010(1):23-28.WANG Xiaogang,XIE Yunxiang,HUANG Shaohui,et al.Unification of SPWM and SVPWM in four - leg inverter[J].Electric Machines and Control,2010(1):23 -28.
[6]JONES M,VUKOSAVIC S N,DUJIC D,et al.Five-leg inverter PWM technique for reduced switch count two-motor constant power applications[J].Electric Power Applications,2008,2(5):275-287.
[7]梅杨,王立朋,李正熙.提高五桥臂逆变器电压利用率的调制策略[J].电工技术学报,2013,28(12):207-214.YANG Mei,WANG Lipeng,LI Zhengxi.A modulation method of five-leg inverter for voltage transfer ratio enhancement[J].Transaction of China Electrotechnical Society,2013,28(12):207-214.
[8]LI Yi,PENG Yongjin.Research on simulation method based on finite state machine in power electronics circuit[J].Computer Simulation,2005,22(9):92 -98.
[9]唐雄民,易娜,彭永进.一种基于有限状态机的电力电子电路控制方法的研究[J].电工电能新技术,2006,3:25-28.TANG Xiongmin,YI Na,PENG Yongjin.Research of control method of power electronics circuit based on Finite State Machine[J].Advanced Technology of Electrical Engineering and Energy,2006,3:25-28.
[10]朱宏伟,邹继斌.低成本永磁同步电动机驱动器的软硬件构架及实现[J].电机与控制学报,2007(4):345-348.ZHU Hongwei,ZOU Jibin.Hardware and software structure of a low-cost PMSM driver[J].Electric Machines and Control,2007(4):345-348.