固体火箭多约束耗尽关机的动态逆能量管理方法①
2014-01-16张志健王小虎
张志健,王小虎
(北京控制与电子技术研究所,北京 100038)
0 引言
与液体火箭相比,固体火箭具有结构简单、安全性好、可靠性高、维护操作简便、准备时间短等特点,被广泛用于航空、航天领域。但固体火箭不具备关机能力,要获得满足特定飞行任务的能量,须采用耗尽关机制导技术,在关机之前,通过改变飞行姿态,消耗多余能量实现期望速度。该技术可降低或解除对复杂反向推力系统的依赖,减小结构质量、提高可靠性;可有效扩大载荷(空间卫星、弹头、滑翔飞行器)飞行范围,使固体火箭发动机能应用于更广泛的任务。近年来,随着快速空间响应、助推滑翔飞行器、高轨拦截等课题的兴起,固体火箭发动机能量管理制导作为一项关键技术,再次成为热点受到广泛关注[1-6]。
固体火箭大气层外耗尽关机制导技术包含两部分:一是根据目标和轨迹约束计算期望关机速度;二是根据发动机剩余能量、当前速度和期望速度进行耗尽关机能量管理。耗尽关机能量管理可分为两大类:一类能量管理基于零射程线[7-8],其原理是将推力置于不影响射程的方向,从而对关机时间偏差不敏感,但该方法不具备多约束能力;另一类具有速度控制能力,该方法使飞行器在关机时达到指定速度矢量。本文研究速度可控的多约束耗尽关机能量管理。
速度可控能量管理可细分为开环和闭环:(1)开环方式,有姿态调制能量管理[9],将能量管理飞行分为6段,在能量管理前完成各段姿态指令计算。因是开环策略,姿态调整次数多,易受干扰影响、精度差、且不利于大能耗管理,所以出现了一些减少分段的改进型[4,10]。(2)闭环方式,有通用能量管理和样条能量管理。通用能量管理[11](GEM)简单而精确,但不能控制能量耗散强度,起止点攻角很大。为实现助推滑翔式飞行器助推末端水平速度、零攻角约束,徐衡、Liu Luhua 等提出了样条能量管理[1-2](SEM),可消耗较大能量,且具有末端约束能力。但其能量耗散强度不可控,导致大能耗管理时,在助推末段姿态角快速变化,不利于控制。
鉴于既有能量管理方式的不足,为了在不约束姿态角运动情况下简化能量管理问题,本文以多余视速度增量为状态变量,建立一种新型耗尽关机能量管理模型,并分析其特性;然后,根据关机约束,构建了一种闭环动态逆能量管理(IEM)方法,根据剩余飞行时间和多余视速度增量,规划多余视速度变化曲线,实现能量耗散强度可控的能量管理。
1 能量管理问题
多级火箭的上面级,已处于大气层外或大气密度很小,可忽略空气阻力。设飞行器初始速度为v0,发动机推力矢量F,关机时间tf,则能量管理目标是:在tf时,使速度矢量达到期望速度vr0:

其中,F大小不变、方向可控;g为重力加速度。飞行中,通过改变F的方向来达到目标。当固体火箭发动机装药量固定,发动机产生的总视速度增量S0为常值[12-13],其大小为

式中 mf为关机质量;m0为起始质量;F为推力为质量变化率。
具有速度控制能力的耗尽关机能量管理,便基于S0为定值,通过规划飞行姿态消耗多余能量来实现。式(1)形式的速度控制,有3个自由度,不利于能量管理设计,故以往都将三维空间能量管理约束到二维平面内(俯仰平面、偏航平面或由待增速度和重力方向构成的平面)。该降维虽然可行,却约束了飞行器姿态运动范围,限制了能量管理方式的多样性;且当能量消耗大,须进行正、负两方向的快速姿态调转,不利于跟踪控制。
2 基于动态逆的能量管理方法
本章建立以多余视速度增量和趋近角为状态量的能量管理模型,不作平面约束,将三维问题降为二维;然后给出一种基于动态逆的能量管理策略。
2.1 多余能量为状态的数学建模分析
设期望在tf时刻达到速度vr0,因飞行器处于重力场,为补偿重力影响,构建虚拟期望速度vr:

又设剩余视速度增量为S,当前速度v到vr矢端长度L,则瞬时多余视速度增量P为

若期望速度可实现,则必有P>0。能量管理目的是寻找姿态角变化律,在关机时实现期望速度。
为简化问题,假设:(1)能量管理过程,发动机推力与飞行器纵轴重合;(2)期望速度的变化可忽略。飞行器姿态、速度、期望速度的位置关系如图1所示。图1中,α为攻角;γ为推力与OAB平面夹角;OAB平面指速度与期望速度所成平面。

图1 空间几何关系Fig.1 Space geometry relationship
因vr的虚拟重力场与v所受重力场相同,故L大小仅受推力影响。设趋近角∠ABO为θ,则:

整理可得
其中,m为当前质量;视加速度F/m可测;α*是速度与的夹角;L是 的长度,故:

式(4)即能量管理新模型,能量管理目的是设计姿态角α、γ的变化律,使关机时P=0。
基本性质1 式(1)形式能量管理,等价于:

该性质可由式(4)第一式得到。
该性质可由式(4)第二式得出,而要使γ有解,须满足α≥α*。
该性质表明,存在一条分界线,在该线一侧,趋近角变小,另一侧变大。

该式表明,即使保持趋近角不变,通过改变α亦能控制多余视速度增量的消耗。若关机时=0,必有α=α*=θ,且此时γ有唯一解γ=180°。所以,要减小关机攻角,须减小趋近角θ。
2.2 动态逆能量管理

其中


式中 u为输入量;X为状态量;δ为飞行姿态,δ有界,满足‖δ‖2≤1;B、A(t,v)、K(t,v)均为变参数矩阵,其中A为酉矩阵,满足AAT=I。
动态逆法关键是根据期望多余视速度消耗率,求解指令姿态α、γ,使如下泛函值最小:

其中,γ∈[0,180°],若飞行中限制最大攻角为 αmax,则α∈[0,αmax)。
当α、γ存在实数解,则

由此可得 αc、γc。
设相关增益为kα、kγ,则控制指令可取为

2.2.1 期望多余视速度增量变化率
由于采用动态逆方法,只要设计合理的变化轨迹,便可实现耗尽关机能量管理。
[定理1] 当不考虑姿态角限制和姿态变化的动态过程,则若期望多余视速度变化率为

且k>1时,可在关机点实现需要速度。
证明:

即

故变化率关于时间的表达式为

证毕。
k>1意味着多余视速度增量的非线性消耗,且离关机越远、k越大,消耗的越快,(α,γ)能更快趋近(α*,180°)。
2.2.2 过程约束对P的影响
上节讨论能量管理的收敛性,实际飞行中,还要求指令信号变化平缓,以满足结构强度、控制能力、跟踪精度的需求。本节讨论姿态指令平滑性对P的变化律的影响。
从图1可见,若推力方向与OAB平面存在夹角,则飞行器速度矢量会绕虚拟期望速度旋转,旋转角速度为

式中 ωmax为旋转速度限制。
因速度相对期望速度的夹角和α、γ共同形成飞行器在惯性空间的姿态。该旋转速度直接影响飞行器的姿态变化,飞行中应限制旋速。
在能量管理关机时刻,有L→0,由式(12)可知,若sinαsinγ≠0,则ω→∞。速度矢量绕期望速度矢量快速旋转,导致俯仰、偏航姿态高频振荡。注意到P·→0,联系性质2和式(12),要使关机时旋速趋近零,必有γ→180°,故要实现关机时姿态不振荡,应当有γ=180°。此时由式(4)第一式可得

其中,α-α*可代表飞行器体轴与AB线夹角。若令β=α-α*,则

在制导中,应使β变化缓慢,即应满足:

[定理2] 多余视速度增量按如下规律变化时,式(15)成立:

其中,k>3。
证明:
由定理1可知,存在时间t0,当 t>t0是可实现式(10)所对应的变化曲线。故当t>t0有

代入式(14)右侧整理得


证毕。
定理2阐明:关机点附近,要使姿态角变化率很小,P应是时间的3阶以上曲线。而离关机较远时,可视P的大小调整系数k,减缓P的消耗速度,提高对期望速度变化的适应性。
因A为酉矩阵,故
即

(1)平面内能量管理

采用该指令,平面OAB不旋转,是一种平面能量管理,与传统能量管理方法维度一致。该方法在能量管理过程中,∠ABO单调递增。
(2)螺旋能量管理
式(12)中,当 v、vr确定,旋转速度由 α、γ 决定,而α、γ由、确定。所以,旋转速度受约束时,应考虑与ω的关系。

当 和ω梯度方向一致时,等 线和等ω线条相切,切点满足:

由于旋速受限,能量管理中,会存在一条等ωmax线,α、γ的取值不能进入其所包含区域,据此可确定指令范围,本文给出一个求限定条件下αc、γc的方法,其步骤如下:
b.由(α0,γ0)确定该下最大旋速 ω0。
c.若 ω0≥ωmax,则取等 ωmax线和线交点对应的(α,γ)作能量管理指令。若 ω0<ωmax,说明该线上所有组合都可作为能量管理指令。此时,为保证指令连续和α收敛,用如下方法确定指令(αc,γc)。
首先计算αc:

其中,0<η<1;当α受约束,则限制αc取值。
然后根据式(8)确定γc。由此实现使攻角逐渐变小的螺旋能量管理。
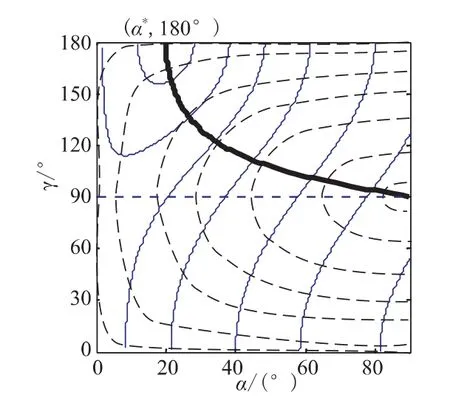
图2 等 线与等ω线的关系Fig.2 Isoline of and ω
当 ξ>0 时,若 ηωmax>ω0,则有 αc>α0,从图 2 可知,在相同多余视速度消耗率下,对应的γc角更接近 ,速度矢量更快地向期望速度靠近;若ω0>ηωmax,则相反:γc处于黑线下方,θ角增大,式(12)分母增大,使可实现的最大旋速ω0逐渐减小,直至小于ηωmax。该方法能在保证最大旋转速度不超限的情况下,更快地收敛到期望速度。另外,根据性质3,黑色粗线是趋近角θ变大、变小的边界线。所以,ξ正负直接影响关机时刻θ角的大小,从而决定关机攻角大小。其中,当ξ为正时,θ逐渐变小;为负时,θ变大,不利于实现末端零攻角,应避免采用。
3 仿真分析
本章通过数学仿真分析所提方法的特性和效果,分3部分:(1)重要参数影响;(2)不同期望速度的能量管理性能;(3)与已有方法进行对比。
仿真中假设平面地球,该多级飞行器数据参考文献[1],第三级点火时:水平速度 3 453.4 m/s,垂直速度 569.4 m/s,秒耗量= - 32.639 kg/s,推力 F=95 110 N,初始质量 m0=2 401.3 kg,攻角为零,发动机工作时间t=50 s。发动机总视速度增量为3 316.8 m/s。飞行过程约束:姿态角速度小于10°/s。
3.1 多约束动态逆能量管理参数特性
3.1.1 参数 k 的影响
设关机期望速度为水平6 000 m/s。此时多余视速度增量占总视速度增量的23.2%。
应用平面能量管理时,飞行器只在纵向面内转动,可用俯仰角、俯仰角速度来描述姿态变化。k分别取2、3、5 时,能量管理结果见图 3。

图3 多余视速度增量、俯仰角、俯仰角速度变化曲线Fig.3 Curves of excess velocity capability,angle of pitch and pitch velocity vs time
由图3可见,k越大,P越快地接近0,前半段消耗越多;与之对应,在前半段:k越大俯仰角越大、大角速度持续的越长。这是因为相同多余视速度增量下,k越大越大,需用姿态角越接近最大耗能姿态。关机点附近,当k=3,俯仰角速度基本不变;当k=2,则越接近关机点,俯仰角速度越大;当k=5,越接近关机点,角速度越小。与定理2一致。
3.1.2 参数 ξ的影响
当采用螺旋方式管理能量,不管ξ取何值,其速度矢量都将在惯性空间螺旋。ξ不同螺旋轨迹不同。下面给出k固定,ξ变化时的仿真结果。其中,期望关机速度取水平6 000 m/s。
图4为速度矢量在沿虚拟期望速度方向的投影。可知,ξ越大,速度矢量越快地贴近期望速度。需要说明的是若ξ绝对值很小,则式(19)右侧第二式的调节能力非常小,飞行中旋速始终接近最大可达螺旋。此时,若速度矢量过早接近虚拟期望速度,则可能导致旋转速度过快,超出角速度限制。所以,ξ绝对值不应过小。从图5可知,相对于ξ=0,当ξ为负,则推力使速度矢量远离虚拟期望速度,关机攻角大;当ξ为正,则推力使速度矢量贴近虚拟期望速度,关机攻角小。另一方面,从图6可知,相对于负ξ,能量管理过程中,正ξ飞行的姿态变化速度会加快,这是速度矢量更快地贴近期望速度矢量的必然结果。

图4 速度在期望速度轴向的投影Fig.4 Velocity projection on vertical plane ofvr

图5 姿态角α和γ的轨迹Fig.5 Trajectory of α and γ

图6 飞行器的最大角速度Fig.6 The maximum angular velocity
3.1.3 大范围能量管理精度
IEM具有大范围能量管理特点,为统计不同强度能量管理特性,每隔100 m/s给出4 000~6 700 m/s水平关机速度管理结果,详见图7。此时多余视速度增量占总量的 2.1%~83.3%。

图7 不同期望速度的能量管理结果Fig.7 Energy management results of difference desired velocity
由图7可见,速度大小偏差在3.2 m/s以内,速度与期望速度的夹角在0.013°以内。关机偏航角小于20°,姿态角速度小于 1.5°/s,有利于关机后的飞行动作如姿态调转、级间分离等。尤其当能量耗散率小于41.3%(期望速度大于5 400 m/s),速度大小偏差小于0.25 m/s,角速度小于 0.25°/s,关机攻角小于 5°,且关机速度越大攻角越小,说明该方法具有很高的速度控制精度。当能量耗散率大于44.3%(期望速度小于5 300 m/s),随着速度减小攻角迅速增大,这是因为攻角小意味着推力基本用来增加速度;当能量耗散率大,则须进行长时间、大强度机动飞行。所以,耗散率增大,攻角会增大。需要说明的是本仿真中对不同的耗散强度,采用了相同的 k、ξ、η、kα、kγ。其中,η=0.7、ξ=0.07、k由零时刻2增加到关机时刻的3.3。说明该方法具有鲁棒性很强的特点。
3.2 3种不同的闭环能量管理方式
为研究本方法与其他具有速度控制能力的闭环能量管理方式的异同,与GEM、SEM方法进行了对比,结果如图8所示。期望水平速度6 000 m/s。
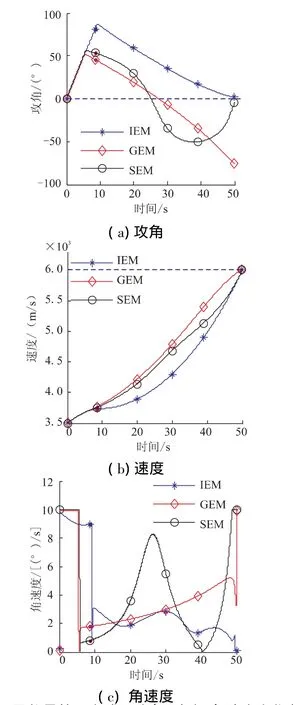
图8 不同能量管理方式下攻角、速度、角速度变化曲线Fig.8 Angle of attack,velocity,and angular velocity under different method
由图8可见,这3种方式都具有很高的速度控制精度。其中,由于GEM采用圆弧轨迹管理多余能量,不具备攻角约束能力,其末端攻角会非常大,达到78.2°,而 SEM 只有 3.9°,IEM 只有 2.6°,详见图 8(a)。正因为SEM、IEM末端攻角小,故关机点附近速度增加快;GEM攻角大,速度增加慢(图8(b))。在角速度方面(图8(c)),因SEM方法采用三阶多项式规划速度变化轨迹,所以姿态出现起始、中间、末端3次快速变化;而GEM虽然中间段姿态变化平缓,但末端姿态快速变化。相比之下,除起始时刻建立姿态的过程,IEM方式姿态角速度一直小于前2种方法;其角速度大小虽小幅起伏,但在整个过程中具有减小趋势,尤其在关机点附近角速度需求远小于前2种方式。因此,IEM方法的制导指令更有利于控制实现。
4 结论
(1)针对传统能量管理方法不利于多约束耗尽关机,定义了趋近角并结合多余视速度增量建立了新型能量管理模型,该模型与传统能量管理模型等价,可作为速度可控耗尽关机问题的一种新的数学描述。
(2)基于动态逆的能量管理方式设计简单,设计参数只有2个,且仿真结果表明参数设计具有非常强的鲁棒性。
(3)该方法能量管理具有精度高、能量管理范围大、角速度小、末端攻角小的特点,可满足关机点速度、攻角、角速度等多约束。
[1] Heng X,Wanchun C.An energy management ascent guidance algorithm for solid rocket-powered launch[C]//17th AIAA International Space Planes and Hypersonic Systems and Technologies Conference.2011,Grand Hyatt,San Francisco,California.
[2] Liu L,Chen K,Tang G.Research of multi-restriction energy management of solid rocket[C]//5th International Conference on Recent Advances in Space Technologies.2011,Istanbul,Türkiye.
[3] 李新国,王晨曦,王文虎.基于修正Newton方法的固体火箭能量管理方法研究[J].固体火箭技术,2013,36(1):1-5.
[4] 姚党鼐,张力,王振国.姿态角单次调整的固体运载火箭耗尽关机能量管理方法[J].国防科技大学学报,2013,35(1):39-42.
[5] 陈峰,王育林,肖业伦,等.基于预测脱靶量的远程拦截速度增益导引[J].航空学报,2008,30(06):1665-1672.
[6] 胡正东,郭才发,曹渊,等.轨道轰炸飞行器过渡段轨道设计与制导[J].固体火箭技术,2009,32(05):473-477.
[7] White J E.Cut-off insensitive guidance with variable time of flight[R].AIAA 93-3785.
[8] 周军,潘彦鹏,呼卫军.固体火箭的鲁棒自适应耗尽关机制导方法研究[J].航天控制,2013,31(3):34-39.
[9] Patha J T,Mcgehee R K.Guidance,energy management,and control of a fixed-impulse solid-rocket vehicle during orbit transfer[R].AIAA 76-1920.
[10] 刘新建,袁天宝.固体小运载的制导方案设计与仿真[J].系统仿真学报,2005,17(11):2734-2736.
[11] Zarchan P.Tactical and strategic missile guidance[M].New York:AIAA Inc,2007.
[12] 陈世年,李连仲,王京武.控制系统设计[M].北京:中国宇航出版社,1996.
[13] Wiesenberg B.Improvements in reusable solid rocket motor performance predictions[R].AIAA 2000-3182.