北斗系统信号NH码处理方法研究
2014-01-10夏长峰刘党辉金东阳
夏长峰,刘党辉,金东阳
(装备学院,北京 101416)
1 引言
北斗卫星导航系统简称北斗系统(BeiDou navigation satellite system,BDS)B1频点信号和全球定位系统(global positioning system,GPS)的L1信号特点大体相似,C/A码周期都是1ms,坐标系偏差不到5cm[1],导航信息结构大致相同,许多适用于GPS的算法可以不经修改应用于北斗系统。北斗系统在信号结构上与GPS不同之处在于,北斗系统B1采用Neumann-Hoffman(NH)码、CA码、导航信息码同步调制。北斗系统中圆地球轨道/倾斜地球同步轨道(medium earth orbit/inclined geosynchronous satellite orbit,MEO/IGSO)卫星的导航电文原始比特率为50bit/s,经NH码调制后数据比特率为1 000bit/s,这样每1ms都有可能发生数据比特翻转。这种改进有利有弊:一方面,NH码可以提高抗窄带干扰的能力,降低卫星间信号间的互相关特性[2];另一方面,NH码影响载波跟踪环路的准确性。
GPS频率跟踪环采用的是锁频环(frequency lock loop,FLL)及辅助锁相环(phase lock loop,PLL)的方式。其中,FLL有较好的鲁棒性,PLL可以提高跟踪精度。FLL可供使用的鉴别器算法有点积叉积法、叉积法、二相反正切法和四相反正切法[1]。由于四相反正切法无需计算信号幅度,且在低信噪比条件下也有较好的跟踪效果,因此应用最为广泛。这种鉴别器可以允许较大的捕获频率误差,但是对数据跳变敏感[4],因此相邻的积分序列不应该存在频繁的比特跳变。对于数据比特率为50bit/s的GPS来说可以满足这项要求,因为比特翻转导致鉴别器受影响的可能性很低,FLL可以正常工作[5];但是对于北斗系统 MEO/IGSO卫星信号,数据比特最短只持续1ms,相邻积分序列包含不同的数据比特,鉴别器受影响的可能性增大,应用于传统GPS接收机的对比特跳变不敏感的鉴别器无法直接应用于北斗系统。因此北斗接收机应选择一个对数据比特跳变不敏感的鉴别器。NH码的影响可以通过非相干累积[6]或者前相关方法[7]来克服,但是这两种方法都受信噪比影响。
基于频率鉴别器的原理,本文分析了频率鉴别器输出的频率误差与相邻积分序列的关系。分析发现,四相反正切鉴别器受数据比特跳变影响输出错误的频率误差,导致接收机无法正确跟踪卫星信号。相反,由于二相反正切鉴别器对比特跳变不敏感,因此适用于北斗接收机FLL环路。最后,通过软件接收机对采集到的卫星信号进行实际验证,结果表明二相反正切鉴别器适用于FLL环路,并且利用相关法可以去除NH码,解调导航数据。
2 NH码相关性分析
北斗系统MEO/IGSO卫星的导航电文信息位宽度为20ms,并同步调制有周期为20ms的NH码(0,0,0,0,0,1,0,0,1,1,0,1,0,1,0,0,1,1,1,0),码速率为1 000bit/s,码宽为1ms。图1为6号卫星与7号卫星的CA码20ms互相关的结果;图2为对6号卫星与7号卫星的CA码、NH码构成的叠加码互相关的结果。由图1和图2可以看出,NH码能够改善卫星信号间的互相关特性。

图1 CA码相关性
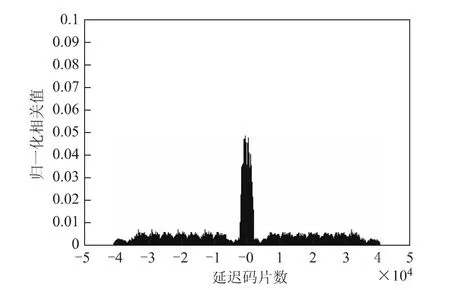
图2 叠加码相关性
3 鉴别器算法分析
3.1 信号模型
经过信号采集器对信号进行下变频、采样和量化,接收到的北斗系统信号可以表示如下[8]

式(1)中,P代表信号振幅,C(t)代表测距码,N(t)代表NH码,fIF代表中频频率,fd代表多普勒频移,φ0代表信号初始相位,n(t)代表随机噪声。
本地生成的载波表达式为

式(2)中,f′d为多普勒频移的估计值,φ′0为初始相位估计值。
将采集到的中频信号与本地载波相乘,并与伪随机码做相关,从时间t起进行Tms的相干积分,最终得到I/Q积分输出。假设伪随机码与本地码码片对齐,且积分周期内导航数据D和NH码不变,同相支路相关处理得

对式(3)从时间t起进行Tms的相干积分得

由于式(4)中分母项2π(2fIF+fd+f′d)≫2π(fd-f′d),因此将第一项看作可忽略项NI,进而得到

式(5)中,Δf代表多普勒频移误差,Δφ0代表初始相位估计误差。同理,正交支路相干积分结果为

将积分结果以复数形式表示,无噪声情况下,结果为

由于频率误差Δf的存在,在矢量图中该向量的端点将会旋转,并且旋转速度和Δf成正比[9]。鉴别器根据I/Q积分值求得Δf的估计值,进而通过数控振荡器(numerical controlled oscillator,NCO)不断校正本地载波,从而减小频率误差。向量rP(t)振幅以及相位角与频率误差Δf相关。I、Q幅值相同,因此无法从幅值信息中推导出Δf的值。但是相位值可以通过与相邻周期的向量rP的差别来获得。将rP(t)与它前一周期向量的共轭形式相乘,

式(8)中,A代表PTsinc(πΔfT),Δt代表相邻两个积分时间段的时间差,也就是一个积分周期T。
由公式(8),Δf可以通过的相位获得,推导如下[8]

令

对比公式(8),得到

3.2 鉴别器选取
可以看出2πΔfΔt可以通过反正切函数计算求得,二相反正切函数返回值2πΔfΔt=arctan(Y/X)取值介于-π/2和π/2之间。当D0DN0N中存在比特跳变时,X和Y的值也同时变化,但是Y/X的符号不发生改变。由于二象限鉴别器对符号变化不敏感,因此不受D0DN0N符号跳变的影响。
四相反正切鉴别器的返回值2πΔfΔt=arctan2(Y,X)取值范围在-π到π之间。但是这种形式的鉴别器的幅度值D0DN0NA2必须为正数,否则四象限鉴别器的输出将会发生180°相位翻转。这种情况下,鉴别器的输出结果将会有180°相位翻转误差。传统GPS的L1信号中,导航数据每隔20ms可能发生一次翻转,因此产生这种错误的最大可能性为5%,不会影响整体的效果。但是,北斗系统的B1频点信号每1ms都有可能发生比特跳变,无法保证D0DN0NA2为正数,因此四象限鉴别器不再适合于含有NH码的北斗系统信号。例如在式(8)中,当D0N0为1,DN为1,则相位变化完全是由频率差异引起的;但是当D0N0为1,DN为 -1时,由公式2πΔfΔt=arctan2(Y,X)所得频率差是由频率差和数据跳变共同造成的,即包括了频率差Δf和180°相位翻转。
对于1ms相干积分,四象限反正切鉴别器的牵引范围最大。然而,由于北斗系统B1频段信号的NH码存在导致比特跳变频率增加,环路对比特跳变敏感,因此四象限反正切鉴别器不适合北斗系统频率鉴别器。由于二象限反正切鉴别器对比特跳变不敏感,所以是最适于BDS信号跟踪的FLL鉴别器。其返回值取值范围是 [-π/2,π/2],即从而得到积分时间Δt为1ms,因此容许的频率误差Δf范围是 [-250Hz,250Hz]。
4 实验分析
4.1 信号跟踪
采用FLL辅助PLL对北斗系统B1频段信号进行跟踪,采用250Hz作为频率搜索的步长,对中频信号进行并行码相位捕获,得到的频率和码相位作为跟踪环路的输入;FLL环路采用二象限反正切鉴别器。图3、图4分别为采用二相反正切函数和四相反正切函数作为FLL鉴别器,对14号卫星进行跟踪过程中鉴别器的输出结果,箭头所指时元处为输出存在差异的情况。存在差异的原因在于四相反正切鉴别器对比特跳变敏感,因此产生错误的判断。

图3 二相反正切鉴别器输出结果
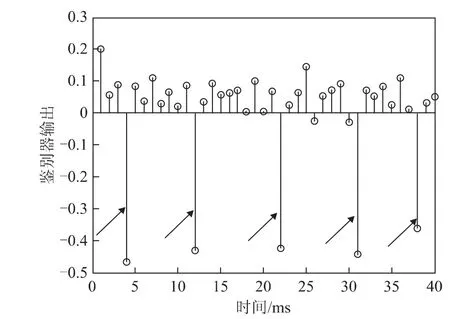
图4 四相反正切鉴别器输出结果
图5为跟踪所得I通道积分结果。
4.2 数据解调
D1导航电文跟踪的结果归一化后如图6所示。
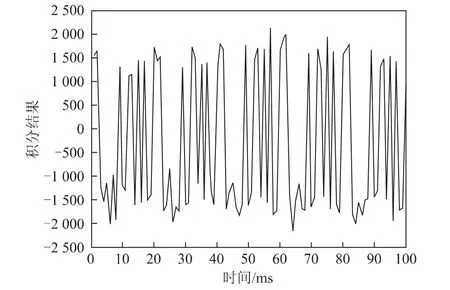
图5 14号卫星跟踪结果
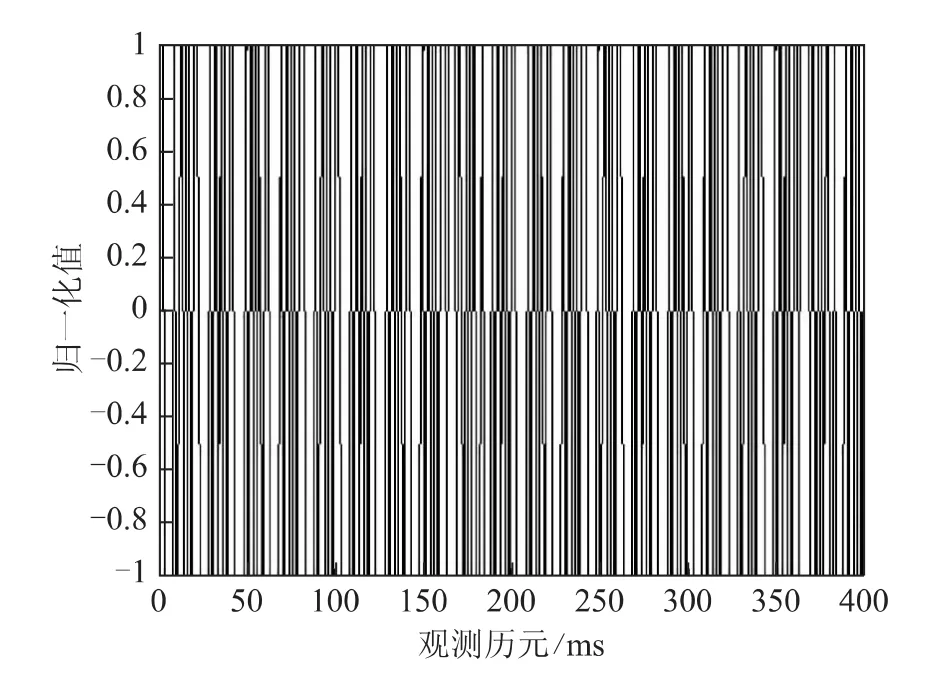
图6 跟踪结果二值化所得数据
因为D1导航电文上调制有NH码,跟踪结果就是经NH码调制过的导航电文,所以必须对跟踪结果进行解调才能得出正确的导航电文。解调导航数据首先要确定NH码的起始位置,这个过程可以通过相关法实现[11]。相关函数的第一个输入是将跟踪到的导航数据二值化的数据序列,用1和-1表示;第二个输入是NH码序列。当相关函数绝对值为20时,说明找到NH码的起始位置。相关法示例如图7所示。

图7 二值化数据和NH码的相关值的绝对值
找到NH码起始位置后,通过相关法剥离NH码,从而解调导航数据。将图6中的观测数据剥离NH码后得到的导航电文结果如图8所示:

图8 解调后的导航数据
5 结束语
本文针对BDS信号调制有NH码的特点,在跟踪环节,分析了四象限反正切函数不适用于北斗系统的原因,提出采用二象限反正切函数作为鉴别器来克服比特翻转的影响;在数据解调环节,提出利用相关法寻找NH码在数据中的起始位置,并利用相关法剥离NH码,解调导航数据。实测信号跟踪及解调结果证明了所提出方法的有效性。
[1] 文援兰,廖王英,梁加红.卫星导航系统分析与仿真技术[M].北京:中国宇航出版社,2009.
[2] 雷雄俊,刘光斌.GPS伪随机序列的构成与应用分析[J].光通信研究,2011,36(6):64-67.
[3] 姜毅.GNSS接收机高性能跟踪与捕获环路算法研究[D].大连:大连海事大学,2010.
[4] GLEASON S,GEBRE-EGZIABHER D.GNSS Applications and Methods[M].MA:Artech House Inc.,2009.
[5] PISONI F,MATTOS P G.A BeiDou Hardware Receiver Based on the STA8088Chipset[C]//Proceedings of 2013International Conference on Localization and GNSS(ICL-GNSS).Turin:IEEE,2013:1-6.
[6] SHANMUGAM S K,WATSON R,NIELSEN J,et al.Differential Signal Processing Schemes for Enhanced GPS Acquisition[C]//Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GNSS 2005).Long Beach,CA:The Institute of Navigation,2001:212-222.
[7] ZHENG Bo,LACHAPELLE G.Acquisition Schemes for a GPS L5Software Receiver[C]//Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GNSS 2004).Long Beach,CA:The Institute of Navigation,2004:1035-1040.
[8] YAN Kun-lun,ZHANG Hong-ping,ZHANG Ti-sheng,et al.Analysis and Verification to the Effects of NH Code for Beidou Signal Acquisition and Tracking[C]//Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GNSS 2013).Nashville,Tennessee:The Institute of Navigation,2013:107-113
[9] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[10] MACABIAU C,RIES L,BASTIDE F,et al.GPS L5Receiver Implementation Issues[C]//Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GPS/GNSS 2003).Portland,OR:The Institute of Navigation,2001:153-164.
[11] 闻长远,岳富占,仇跃华,等.高轨环境下BDS弱信号跟踪技术研究[J].飞行器测控学报,2013,32(4):363-370.
