自动耳石复位旋转椅的设计与研发
2013-11-12徐飞张定国高雪官殷善开
徐飞,张定国,高雪官,殷善开
1 上海交通大学机械与动力工程学院,上海市,200240
2 上海交通大学附属第六人民医院,上海市,200233
0 引言
良性阵发性位置性眩晕是一种常见的前庭末梢病变,发生的主要原因是由于脱落的耳食晶体进入运动感应的半规管,且在大多情况下为进入后半规管。当病人的头部转动时,脱落的耳食会在半规管内移动,从而影响半规管的工作,一般引起人对空间感知能力的下降,并伴随着头晕、呕吐以及眼震等症状[1]。良性阵发性位置性眩晕最早由Barany[2]于1921年提出,在他的基础上后来Dix、Hallpike以及Eply等[3]都提出了自己的认识,并创建了相应的疗法,如著名的Epley疗法。
目前为止,对于良性阵发性位置性眩晕的发病机理还未有统一的认识,主要有两种流行的假说,分别是Schuknecht[4]于1969年提出的壶腹嵴顶结石假说和Hall等[5]在1979年提出的半规管结石假说。壶腹嵴顶结石假说认为,脱落的耳石碎片附着在半规管的壶腹嵴顶结石处,导致内淋巴的密度与壶腹嵴顶密度不同,从而导致壶腹嵴顶处对重力的感应发生异常。当人体的头部空间改变位置时,会发生壶腹嵴顶耳石变位,导致眩晕与眼震。而半规管结石假说则认为,耳石颗粒并非粘结在后半规管里面,而是悬浮在半规管的淋巴中,当头部位置变动时,耳石颗粒会受重力影响向壶腹嵴顶的方向移动,从而导致上述症状。两种假说都各有侧重点,但都是建立在耳石脱落的基础上的,所以近些年来推广的耳石复位方法主要是手法复位,即通过移动病人的头部从而将脱落的耳石回到原来的位置,达到治疗良性阵发性位置性眩晕的目的。通常的手段除了上述的Epley疗法,还有Semont管石解脱法以及两者结合使用等的方法[6]。事实证明,采用手法复位有高达90%以上的治愈率[7-8]。
基于手法复位的耳石复位方面的研究,Todd M.Squires等[9]建立了耳石复位的二维数学模型,指出耳石的偏移以及伴随的眼震能够被定量地计算出来。而Giovanni Berselli等[10]分析了耳石复位的刚体动力学模型,提出了导向的耳石复位转椅的设计模型。在治疗仪方面,T.Russomanol等[11]设计的电控旋转椅,在治疗良性阵发性位置性眩晕方面取得良好的效果。M.C.Tavares等[12]阐述了基于电脑控制的旋转椅报告的控制设计。国内,单希征等[13-14]采用三维滚轮耳石复位系统治疗,也取得了不错的效果。
本文报告了一款新型自动控制三维转椅的设计,以协助手法复位疗法,它可实现一键控制,极大地方便了医师和患者。文章内容主要介绍了旋转椅机械结构设计、用户界面设计以及分析了基于PLC控制系统的框架以及控制流程,实现手动控制和电脑控制。
1 机械结构
三维旋转椅系统的机械机构需要满足以下几点要求:(1)水平方向360o旋转,转速较低;(2)垂直方向360°旋转,转速较低;(3)人的座椅能调整,以便适用于不同身高体重的人。如图1所示,三维旋转椅机械机构共有七个部分组成,即内外框架、内外框架动力驱动装置、底座、力柱以及可调座椅。三维旋转椅系统有四个自由度,两个轴向旋转自由度和座椅的两个移动自由度,其中通过调节座椅的移动自由度来满足个人需要,以及改变重心来减小施加在电机上的转矩。

图1 旋转椅的主要机械结构图Fig.1 The main mechanical structure of the rotatory chair
该系统除了要实现基本功能外,无论是在机械机构方面还是在软件设计方面,最主要是能保证安全性。在机械机构上,动力装置包含步进电机和蜗轮蜗杆减速器,除了能在断电时自锁外,还能抵消一部分施加在电机上的作用力。由于该系统采用开口结构,这对铰接处的作用力非常大,而且内外框架在旋转过程中,铰接处受到的是轴向和径向的作用力,故在铰接处的轴承都采用角接触球轴承。特别是在外框架的铰接处,由于还承受非常大的倾覆力矩,变形是不可避免的,所以采用法兰式角接触球轴承,这样可以在框架由于重力变形时调节法兰抵消变形。
由于在治疗时要将偏移的耳石复位,需要采用较大的加速度,这样对电机的转矩是个较大的负荷。所以,除了在机械设计要保证每个旋转系统的轴对称,在治疗前将座椅左右、上下位置调节好,从而减少由于人体体重的差异而引起的重心的偏移。两个电机在动态旋转过程中所受的力矩,如式(1)、(2)所示:
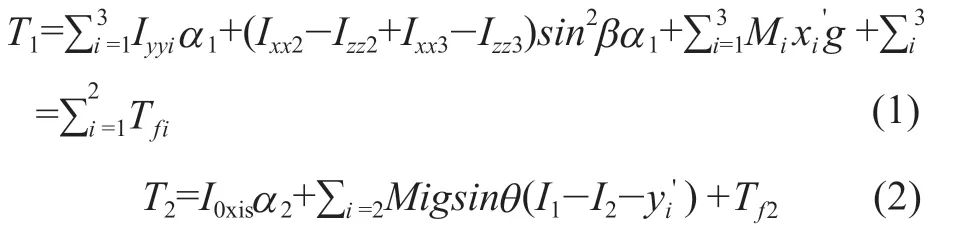
为了简化计算的难度,整个系统分为三个部分,即外框架、内框架以及人与座椅部分,其质量分别为M1、M2、M3,其相对于各自的旋转轴的转动惯量分别为Ixxi、Iyyi、Izzi,αi代表各自的旋转角加速度,Tf代表旋转过程中轴承的摩擦力矩。
通过式(1)和式(2),可以求得式(3)的最大最小值,从而求得两个力矩的相对最小值,如式(4)所示,得到上述最小值下的最佳即得到在治疗前调节的座椅位置。

2 控制系统
系统的硬件结构框架如图2所示。
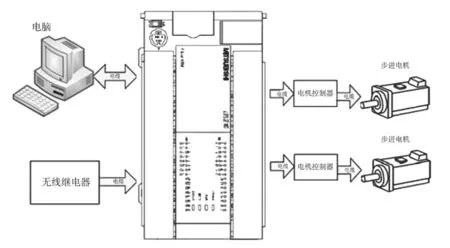
图2 控制系统的硬件结构框架Fig.2 The structure of hardware of controlling system
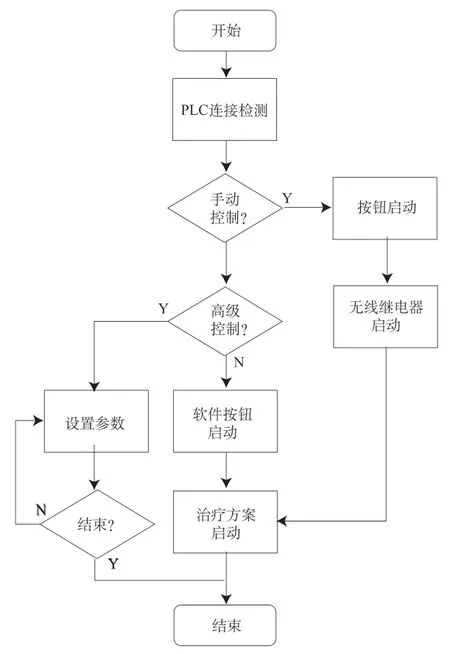
图3 控制系统的软件结构框架Fig.3 The flow diagram of software of the controlling system
控制电机采用FX3U系列(三菱,日本)的PLC。PLC的控制源主要有两个,一个是电脑端的上位机软件,另一个是无线继电器。PLC的软件控制方案如图3所示,通过改变软件的参数,从而修改PLC的内部寄存器,能快速启动预定的治疗方案,同时也能根据具体的情况设置不同的治疗方案,PLC控制的整个过程采用如图4所示的步进式顺序控制法,简化了PLC编程的复杂度。
不管电机的匀速运动还是加速运动,PLC的输出频率与时间的关系图都如图5所示,这样可保证电机运转的平稳。可以求得在框架转动过程中的角度为:
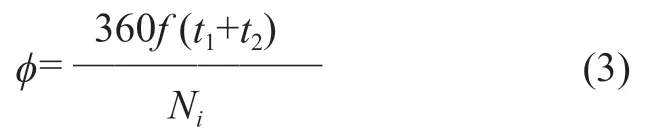
其中φ为转动的角度,t1为加减速时间,t2为匀速运动时间,N为步进电机的轴旋转一周所需的步数,i为蜗轮蜗杆减速器的减速比。
根据式(3),也能计算式(1)和(2)中的角加速度:


图4 PLC步进式顺序控制法示意图Fig.4 The schematic diagram of stepping control for PLC

图5 PLC输出的频率与时间的关系图Fig.5 The relationship between frequency and time for PLC
3 用户界面

图6 三维旋转椅的软件控制界面Fig.6 The user interface of software for rotatory chair
三维旋转椅的用户界面采用Visual Studio2008汇编完成,如图6所示,分为一键控制和高级控制两种方式。一键控制主要是在保证所有的手法复位的过程恒定的基础上,通过上位机软件或者无线继电器来控制PLC内部的继电器,从而能开启手法复位的治疗。由于病人的个体差异性,高级控制能通过输入角度信息、旋转时间以及停止时间等信息,改变PLC内部寄存器的值,从而实现自定义的手法复位治疗,其中前两者之间的关系如式(3)所示。为了保证电机在旋转过程中有足够的转矩,PLC的输出频率不能过大,需要通过软件限制以确保安全。
4 结论
本文完成了自动耳石复位系统的机械结构,软件控制以及用户界面的设计。在测试中转椅基本能满足机械设计要求,实现两维的360o旋转。良好的用户界面可以使医师更为方便地实施医疗操作,保存医学数据和管理患者信息。
本文所述的机械结构和软件框架的设计简单易行,安全可靠,对类似于角度精确度要求不高的设备也有一定的参考价值。
[1] Rajgum SM,Rabbitt RD.Three-dimensional biomechanical model of benign paroxysmal positional vertigo [C].Ann Biomed Eng,2004,32(6):831-846.
[2] Barany R.Diagnose Von Krankheitserbcheinungen im Berciche Dis Otolithenapparates [J].Acta Otolaryngol,1921,2(3):334-337.
[3] Epley JM.The canalith repositioning procedure:For treatment of benign paroxysmal positional vertigo [J].Otolaryngology,1992,107:399-404.
[4] HF Schuknecht.Cupulolithiasis [J].Arch Otolaryngol,1969,90(6):765-778.
[5] Hall SF,Ruby RR,McClure JA.The mechanics of benign paroxysmal vertigo [J].J Otolaryngol,1979,8(2):151-158.
[6] 杨燕珍,黄静辉,余怀生.Epley加Semont 联合手法复位治疗后半规管良性阵发性位置性眩晕[J].中华耳科学杂志,2010,8(1):86-89.
[7] Wietske Richard,Tjasse D Bruintjes,Oostenbrink P.et al.Efficacy of the Epley maneuver for posterior canal BPPV a long-term,controlled study of 81 patients [J].Ear,Nose&Throat,2005,84(1):22-25.
[8] Simhadri Sridhar,Naresh Panda,et al.Efficacy of particle repositioning maneuver in BPPV:a prospective study [J].Am J Otolaryng,2003,24(6):355-360.
[9] Todd M Squires,Michael S Weidman,Timothy C Hain,et al.A mathematical model for top-shelf vertigo:the role of sedimenting otoconia in BPPV [J].J Biomech,2004, 37:1137-1146.
[10]Giovanni Berselli,Riccardo Falconi.Task based kinematic design of a serial robot for the treatment of vestibular lithiasis [C].Proc ICORR,2007:138-144.
[11]Russomanol T,De Azevedol,Dario FG,et al. Development and validation of an electrically controlled rotatory chair to be used as a simulator for spatial disorientation and motion sickness [C].Proc EMBS,2003,4:3306-3308.
[12]Tavares,M.C.Richter.C.M. Development of a DSC-based Rotary Chair for Oto-neurological Diagnosis [C].Proc IFMBE,2007,18:723-727.
[13]单希征,孙勃,马丽涛,等.360°滚转复位法治疗良性阵发性位置性眩晕[J].中华耳科学杂志,2009,7(2):142-145.
[14]单希征,孙勃,龙顺波,等.三维滚轮耳石复位系统及其临床应用[J].中华耳鼻咽喉头颈外科杂志,2008,43(10):786-788.
