MRI引导的相控型HIFU系统框架设计与软件开发
2013-11-12马锐锋沈国峰乔杉魏博陈晟陈亚珠
马锐锋,沈国峰,乔杉,魏博,陈晟,陈亚珠
1 上海交通大学生物医学工程学院生物医学仪器研究所,上海市,200030
2 上海交通大学Med-X研究院,上海市,200030
0 引言
相控型高强度聚焦超声(Phased High Intensity Focused Ultrasound,P-HIFU)采用电子聚焦方式,将低声强的声束在靶区聚焦,使焦域温度在很短时间(0.1~10)s达到65oC以上,使靶区组织发生凝固性坏死,具有焦点定位准确,移动快速等优点,是治疗肿瘤的热门技术之一[1-2]。
由于HIFU治疗的肿瘤位于体内,不能直接观察,因此精确的影像定位对聚焦超声治疗具有重要意义。此外,HIFU治疗肿瘤采用热消融方式,精确的温度控制同样重要。MRI在空间分辨率和温度对比度方面的优势使其成为引导HIFU进行治疗的首选工具[3-4]。
1 MRI引导P-HIFU治疗流程和信息交互
MRI在引导P-HIFU治疗过程中,核心作用是对靶区图像的采集和治疗区域温度的监控。术前,MRI扫描靶区并将获取的图像发送给P-HIFU,P-HIFU根据图像制定治疗路径规划;术中,P-HIFU将当前治疗点的位置信息告知MRI,MRI获取实时的靶区影像信息和治疗点温度信息,反馈给P-HIFU,用于完成治疗过程的PID控制;术后,MRI再次扫描靶区,在P-HIFU中完成靶区影像的三维重建,对治疗效果进行评估。

图1 MRI引导P-HIFU治疗流程Fig.1 Work flow of MRI guided P-HIFU therapy
MRI引导P-HIFU治疗流程如图1所示(纵轴为时间轴)。该流程中,两套系统之间需要不断地进行信息交互,才能实现MRI对P-HIFU治疗过程的引导。它们间的信息交互内容如图2所示。信息交互通过在软件上开发通信模块,采用网络传输实现。

图2 MRI与P-HIFU信息交互Fig.2 Information transfer between MRI and P-HIFU
2 MRI-PHIFU系统整体框架
通过分析MRI引导P-HIFU的治疗流程,结合MRI和P-HIFU的硬件架构,考虑到系统的安全性、稳定性和准确性,MRI引导的P-HIFU系统在结构上分为图像处理机,P-HIFU工控机和系统主控机三个部分。每一部分都由单独的电脑来控制,并需要开发配套的软件完成其功能,见图3所示。软件之间还需要进行一些信息交互,因此通过在每个软件上设置通信模块来实现这个功能,也就是说又将这三部分合为一体,共同完成MRI引导的P-HIFU治疗。
2.1 图像处理机
图像处理机负责处理与图像相关的内容,包括完成治疗计划的制定,二维缩略图和三维重建图像的显示,P-HIFU探头定位,绘制温度曲线等。此外,与MRI交互的工作也由图像处理机来完成。由于图像处理需要占用大量的系统资源,对电脑硬件配置的要求较高,为了不影响系统的稳定性,也为了方便操作人员,将此部分功能分离出来,单独开发软件。
2.2 P-HIFU工控机
P-HIFU工控机直接对P-HIFU进行控制。它根据接收到的治疗焦点队列计算对应的相位,并向下位机发送幅值信息和相位信息。P-HIFU工控机需要完成的功能比较简单,但稳定性要求高。由于是直接控制P-HIFU,安全、稳定是重中之重,即使其他控制端出现问题,该部分依然能按照以前制定好的计划完成治疗或者在必要时中断治疗。所以在软件开发上,除了实现控制下位机的相关功能外,还需做一些安全检查和突发情况的控制。

图3 系统整体框架Fig.3 Framework of the whole system
2.3 系统主控机
系统主控机控制系统的整体运行和治疗流程。系统主控机根据MRI发送的病人信息,给每个病人建立存档,用于记录治疗过程;根据治疗计划的制定情况,决定是否开始治疗;设置治疗参数,比如治疗时间、间隔时间、治疗模式和治疗方向等需在开始治疗前在主控机上完成。系统主控机还根据靶区的温度信息,对治疗过程进行PID控制,结束治疗后需要通知MRI做术后检查评估。
3 软件设计与开发
按照系统框架的设计,图像处理机、P-HIFU工控机和系统主控机三部分都需要独立的软件支持完成各自的功能,软件通信模块将这三部分组合为一个整体的系统,实现数据交互。软件开发语言使用C++,集成开发环境为Visual Studio 2005,并根据不同软件的需求,引入了一些第三方库。
3.1 图像处理软件设计与开发

图4 图像处理机软件功能结构图Fig.4 Structure of image processing module software
图像处理机软件主要完成三个功能:图像显示、图像操作和MRI与系统主控机交互。图像处理软件功能模块设计框图如图4所示。
图像显示部分包括二维显示和三维显示。二维显示是将一组MRI图像以缩略图的形式展示,方便用户查看与选择所要操作的图像,此外,还需绘制温度曲线。三维显示需要重建靶区图像并显示。
图像显示采用VTK实现。VTK(Visualization Toolkit)是一款开源免费的第三方库,用于三维计算机图形学、图像处理和可视化等,可以很方便的实现图像的二维显示和三维重建。还可以加入交互功能,比如通过鼠标拖动来改变图像的窗宽、窗位,或者鼠标滚轮的滚动来做放大和缩小的图像处理等。VTK还提供了一些常见的重建算法,如光线投射法。图像显示模块实现的效果如图5所示。

图5 图像处理机软件的图像显示功能Fig.5 Image show of image processing module software
图像操作部分包括P-HIFU探头在MRI中的定位。定位是依赖于MRI扫描探头的图像,根据探头上的定位标记点计算定位信息。图像操作部分的另一个重要功能是治疗路径规划。选取MRI扫描的靶区图像,采用图形学中常用的扫描线种子区域填充算法和Bresenham直线生成算法计算治疗的焦点,再根据定位信息,计算实际物理坐标。
图像处理机与系统主控机的交互,通过通信模块实现,内容包括接收主控机同步信息、当前治疗点信息和治疗控制指令、发送探头定位信息、治疗计划和MRI返回的温度信息等。图像处理机与MRI的交互内容,包括接收MRI扫描探头和靶区的图像,监控区域的温度信息,发送给MRI同步信息,当前治疗点的信息和监控需求信息。
3.2 P-HIFU控制软件设计
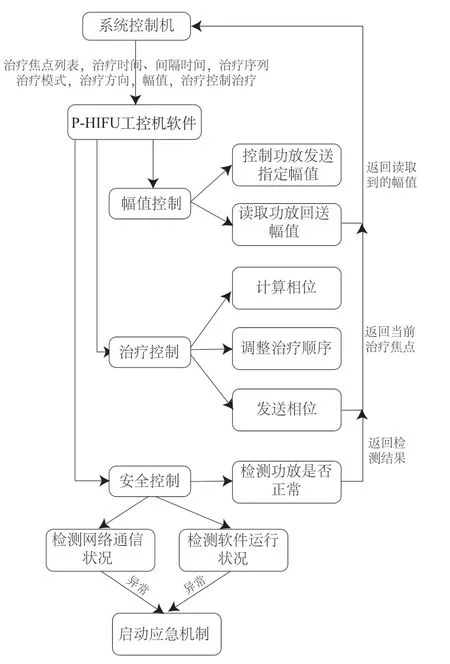
图6 P-HIFU工控机软件功能结构图Fig.6 Structure of P-HIFU control software
P-HIFU工控机软件功能模块如图6所示。此软件功能模块需要完成与系统控制机交互、幅值控制、治疗控制和安全控制四个功能。工控机软件接收系统发送的治疗焦点序列、治疗时间参数以及治疗起停的指令,返回对下位机的监控信息和当前的治疗信息。幅值控制是通过串口通信实现。治疗控制需要根据接收到的焦点序列计算相应的相位信息,并根据治疗序列调整治疗点的加热顺序,在治疗开始时将相位信息发往P-HIFU。相位计算采用伪逆矩阵算法[5],在Matlab中实现,然后将Matlab程序编译为动态链接库,供P-HIFU控制机软件调用。
P-HIFU工控机直接与P-HIFU交互,安全性和稳定性相当重要,所以通过安全控制模块,检测P-HIFU工控机的运行状况、功放的工作状态、主控机软件的连接以及软件本身运行的状况等。
3.3 系统主控软件
系统主控软件结构功能如图7所示,主要完成治疗控制、治疗过程记录以及图像处理软件与P-HIFU控制软件交互三种功能。
治疗控制部分将图像机软件上制定的治疗计划发送到P-HIFU控制软件,根据温度信息对治疗过程进行PID控制;同时提供治疗时间、治疗模式等参数的设置和治疗起停的控制。
治疗记录是系统主控软件的一个重要功能,可记录病人信息、治疗计划、设置的治疗参数以及在治疗过程中的操作等,以供术后的评估和手术过程的再现。

图7 系统主控软件功能结构图Fig.7 Structure of main-control software
系统主控软件不断地与图像控制软件和P-HIFU控制软件交互。P-HIFU控制软件将当前正在治疗的焦点坐标发送给系统主控机,由主控软件直接发送给图像处理软件,并在主控软件上记录。P-HIFU控制软件发送功放输出值给主控机软件,记录和判断功放是否工作正常。图像处理软件将监控区域的温度信息发送给主控软件,判断是否调整治疗点。主控软件将同时给P-HIFU控制软件和图像处理软件发送开始或者停止等治疗控制指令以及同步信息。
4 实验及结论
为了验证软件设计和开发的可行性,进行了试验。试验采用112路阵元的换能器,每路换能器激励频率为1.36 MHz,控制电压为10 V。选离体的猪里脊肉作为试验材料。首先在系统控制机软件上手动加入试验的焦点坐标值,设定治疗路径为直径2.5 cm的圆,如图8(a)所示,治疗平面为焦平面,治疗模式为单焦点加热,每个点加热1 s时间。将治疗参数发送给P-HIFU工控机软件,进行治疗后,结果如图8(b)所示。
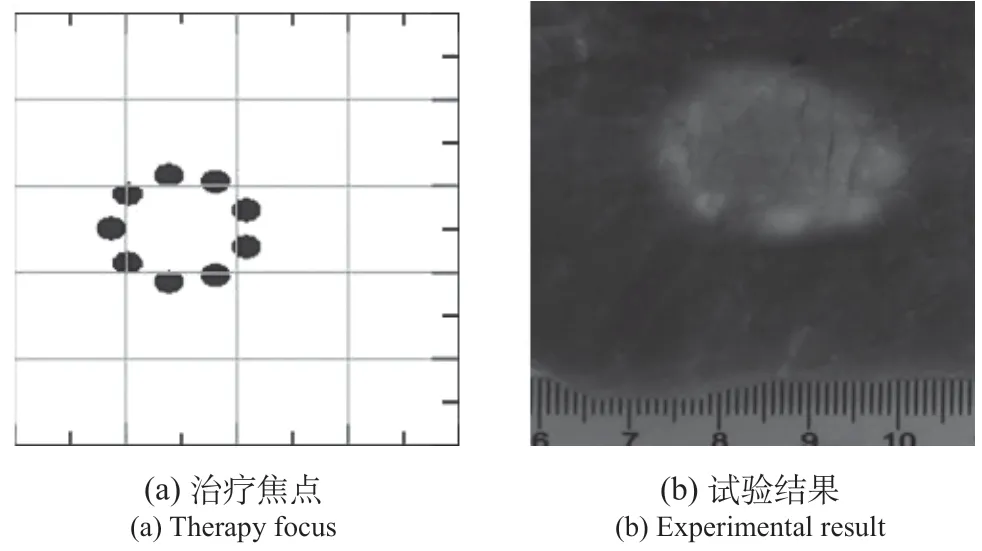
图8 离体实验及实验结果Fig.8 Experiment and result
从试验结果可以看出,采用这个架构的设计,可以完成对P-HIFU的控制,实现适形加热。
MRI引导P-HIFU技术是治疗超声发展的趋势。本文将MRI厂商提供的接口与自主研制的P-HIFU治疗系统进行融合,设计了系统的软件框架并开发了相应的软件。通过实际的系统部署、软件测试和离体试验验证,证明该软件能很好的满足MRI引导P-HIFU系统适形治疗的需求。
[1] Ji X,Shen GF,Bai JF,et al.Multi-element ultrasound phased array applicator for the ablation of deep-seated tissue[J].J Shanghai Jiaotong Univ (Science),2011,16(1):55-60.
[2] Ma Y,Symonds-Tayler R,Rivens IH,et al.A new clinical HIFU system (Teleson II)[C].Proc AIP,2007,911:87-91.
[3] 沈洁,申俊玲,邹建中.核磁共振监控高强度聚焦超声治疗的研究进展[J].临床超声医学杂志,2007,9(8):486-488.
[4] Hynynen,K.MRI-guided focused ultrasound treatment[J].Ultrasonics,2010,50(2):221-229.
[5] 张胜发,沈国峰,吉翔,等.相控型HIFU系统软件的开发与应用[J].中国医疗器械杂志,2010,34(4):255-257.
