采摘机器人柔性末端执行器抓取策略研究
2013-10-17丁媛媛金寅德
丁媛媛,金寅德
DING Yuan-yuan1,JIN Yin-de2
(1. 杭州职业技术学院,杭州 310018;2. 浙江省特种设备检验研究院,杭州 310000)
0 引言
果蔬采摘是水果生产链中最耗时和最费力的一个环节,研究和开发果蔬采摘机器人技术对于解放劳动力、提高劳动生产效率、降低生产成本及保证新鲜果蔬品质具有重要的意义。由于果蔬的外表皮脆弱、形状及生长状况复杂,因此末端执行器的设计通常被认为是农业机器人的核心技术之一[1]。
自1983年以来,采摘机器人末端执行器前沿技术和应用技术的研究和开发已经取得很多重要成果[2],法国、荷兰和日本等国家相继立项研究了采摘果蔬、柑橘、番茄、黄瓜、西瓜和葡萄等智能机器人,其末端执行器以吸盘式和多指式为主[3],我国对农业机器人领域的研究始于20世纪90年代中期,上海交通大学机器人研究所曹其新、刘成良等人完成了智能化联合收割机样机的研制;江南大学机械工程学院章军等提出了基于弹性波壳伸缩的气动驱动器。尽管我国在果蔬采摘机人末端执行器的理论和实践研究都取得了显著进步,但大多数的执行器系统复杂,成本高,通用性差,仍停留在实验室阶段,更难以运用到农业工程实践之中[4]。同时,由于多指式气动末端执行器的果实采摘可以归结为末端执行器手指对具有不同几何形状和外表特性的物体抓取问题,不同的果蔬其外表特性各不同,对于橙、柚等外表皮较厚且富弹性的果蔬,夹持力稍大也不致压伤外表;对于番茄、草莓、茄子等外表皮较薄较脆的果蔬,对末端执行器抓持力的精确控制显得尤为重要[5]。
为此,本文充分考虑果蔬的基本特性( 大小、形状、质量)及其力学特性(压缩性、摩擦性等),提出了一种新型的采摘机器人气动柔性末端执行器,通过对气动弯曲关节的合理设计与配置,可实现不同大小、形状果蔬的稳固抓取;采用电气比例阀控制进出弯曲关节内腔气体压力可实现末端执行器输出力的精确控制,使末端执行器在具有可调输出力的同时具备一定的柔性,既可实现不同果蔬的充分抓持却不会伤到果蔬,在农业、服务业机器人等领域具有广阔的应用前景。
1 弯曲关节数学建模与实验分析
传统的采摘机器人末端执行器大多是针对特定的工作目标而设计的,夹持方式有限、缺少灵活性,无法进行精确的力控制,为此,本文提出了一种适用不同果蔬抓取的弯曲关节,它由气动弯曲结构与刚性诱导结构并联构成,具有良好刚性与柔性,其原理如图1所示。将橡胶管制成弯曲结构与刚性双连杆诱导结构进行一体化设计,形成一个完整的弯曲关节,橡胶管内嵌具有一定强度的螺旋钢丝,可确保当压缩气体经电气比例阀进入弯曲结构内腔时,弯曲结构只有轴向伸长,不产生径向变形,对橡胶管的径向膨胀产生很强的约束作用,从而实现橡胶管弯曲角度与输出力的精确控制。当压缩气体通入弯曲结构内腔时,由于螺旋钢丝的约束作用橡胶管产生轴向伸长,以两个连杆的转轴为中心旋转一定角度;当释放气体时,在橡胶管的弹性力的作用下,橡胶管与诱导结构均恢复到初始状态,因此当采用多个弯曲结构联合控制时,通过控制气体进出弯曲关节的内腔可实现抓紧与松开动作。橡胶套与两端盖过盈配合,保护弯曲关节和连杆机构在工作过程中的不受破坏,由于弯曲关节其他配件均为刚性构件,具有良好的刚度,因此,该弯曲关节可较好地模拟人类手指弯曲关节运动。

图1 弯曲关节原理图
采摘机器人末端执行器需实现果蔬的平稳、无损伤抓取,要有效避免夹持力过大压伤果蔬外表或夹持力过小抓取失稳、果蔬掉落的情况发生,应用系统动力学理论对构成末端执行器的关节进行力学特性分析,其受力模型如图2所示。
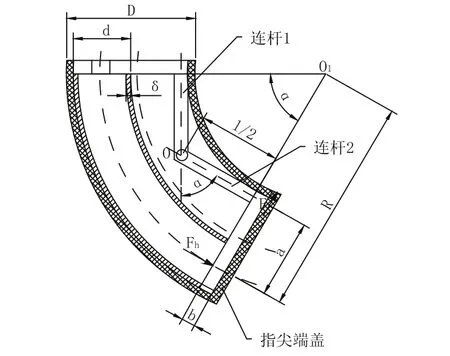
图2 弯曲关节受力模型
1)弯曲关节变形分析
当压力为P的压缩气体充入橡胶管时,橡胶管和刚性诱导机构联合作用,橡胶管变形伸长,根据胡克定律知变形量为:

其中:FN为弯曲关节橡胶管在有压气体作用所受的轴向力;l为橡胶管初始长度,此时刚性连杆2转动角度a=0。;E为橡胶管弹性模量;A为橡胶管截面面积。
由关节几何关系知:
橡胶管变形量:

其中: l'为变形后的橡胶管长度;R为橡胶管弯曲后形成的理论圆半径;a为胶管中心到刚性结构转轴的距离。
橡胶管截面:

其中:D为橡胶套直径;d为橡胶管壁厚。
联立上三式得弯曲关节所受轴向力为:

2)弯曲关节伸长变形下的力学特性分析
此时,橡胶管内压力为P,管外压力为大气压0P,橡胶管所受轴向力:

联立上两式得到弯曲关节内压力:
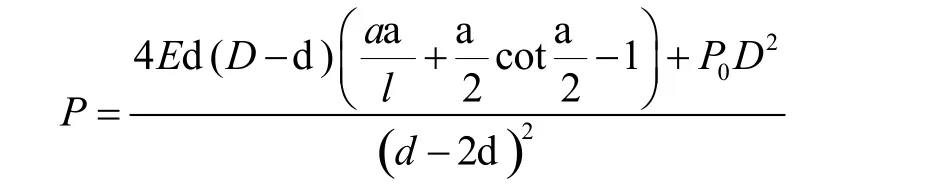
由上式可知:当弯曲结构内腔压力为P时,由于螺旋钢丝的约束作用橡胶管产生轴向伸长,以连杆转轴为中心旋转a角度,a的大小仅与气压P、橡胶管的原始材料及原始形状有关,只需改变输入的气体压力即可改变关节弯曲量,使其符合果蔬的大小、形状,实现不同外形果蔬的抓取。对橡胶管内压力P与连杆弯曲角度关系进行仿真与实验分析,结果如图3所示。

图3 弯曲关节转角分析
从图3可知,理论分析与实验结果吻合,通过控制充入弯曲关节压缩气体的气压可实现关节转角的精确控制。
3)弯曲关节抓取果实时受力分析
在采摘机器人实际工作过程中,关节弯曲一定角度a后接触果蔬,此时,刚性双连杆诱导机构将停止绕转轴的旋转运动,关节停止弯曲,此时继续将气体输入弯曲结构内腔,内腔压力将增加到P+△P(△P为刚性双连杆诱导结构停止转动后产生的气压增加值),形成关节输出力F。弯曲关节指尖端盖所受合力为:



从上式可知,关节输出力F仅与气压增加值△P、橡胶管与弯曲关节原始形状有关,通过对关节停止弯曲后关节气压增加值△P的控制,即可实现关节作用在果蔬上力的精确控制,只需根据水果的力学特性选择适当的△P即可避免果蔬损伤。
仿真分析刚性双连杆诱导结构停止转动后产生的气压增加值Δp与作用于果蔬力的力F如图4所示。

图4 弯曲关节输出力分析
从理论分析与实验分析可知,输出力均随着关节内气压增加值△P的增大而增大,通过控制△P可实现不同的输出力以适应不同力学特性的果蔬的抓取,与理论分析一致。
2 末端执行器抓取策略分析
为使采摘机器人的末端操作器能像人手一样对不同形状和不同性质的物体具有抓、握、夹和拿等功能,有较好的灵活性与广泛的适应性,本文将三个新型弯曲关节以一定的角度关系进行圆周配置,依靠指尖与物体之间的摩擦力克服物体重力实现抓取,其结构如图5所示。

图5 末端执行器结构图
本文以抓取球状果蔬为例,其受力如图6所示。

图6 球状果蔬受力模型
由末端执行器原理可知,三个弯曲关节作用在果蔬上的正压力F将在果蔬的表面产生向上的摩擦力,该摩擦力可与果蔬重力平衡可实现果蔬的有效抓起,由于末端执行器三指由同一台空气压缩机供气,即 F1=F2=F3=F。不同的果蔬其力学特性各异,所能承受的最大压力也各不相同,其值可由实验确定。在采摘作业过程中,为避免对果蔬的压缩损伤,只需控制气压增加值△P即可控制F在适当范围内,保证果蔬表皮组织的完好。

由上式可知,当末端执行器配置完成后,通过控制橡胶管内腔压力可实现不同重量果蔬的抓取;采摘质量较大的果蔬时,可适当增大末端执行器右端两个关节的配置b,以减小输入的气压差△P,防止关节输出力F过大引起果蔬损伤,提高末端执行器的抓取能力。
根据上述分析,搭建实验平台,通过调节电气比例阀的输入电压来调整气压输出,得到末端执行器输出力随橡胶管内腔压力变化曲线如图7所示,末端执行器实际输出力在仿真结果吻合良好,末端执行器在控制好输入气压的前提下,不会对果蔬造成损伤,与理论分析一致。
3 结论
本文提出的采摘机器人末端执行器在气动柔性弯曲关节的基础上引入刚向诱导结构大大加强了关节的侧向刚度,使末端执行器具有较高的通用性,结果表明:通过对三指末端执行器的合理设计可实现不同种类果蔬的平稳抓取;通过控制弯曲关节的气体压力可实现末端执行器输出力的精确控制,避免在采摘作业中损伤果蔬。

图7 末端执行器抓取能力分析
[1] Ceres R,Pons J L,Jiménez A R,et a1. Design and imp1ementation of an aided fruit-harvesting robot (Agribot)[J].Industria1 robot,1998,5(5)∶337-346.
[2] 赵匀,武传宇,胡旭东,等.农业机器人的研究进展及存在的问题[J].农业工程学报,2003,19(1)∶20-24.
[3] Ca1dwe11 D G,MedranoCerda G A,Goodwin M J. Contro1 of Pneumatic Musc1e Actuators [J].IEEE Contro1 Systems Magazine,1995,15(1)∶40-48.
[4] 徐丽明,张铁中.果蔬果实收获机器人的研究现状及关键问题和对策[J].农业工程学报.2004,20(5)∶38-42.
[5] Mohsenin N N.Physica1 properties of p1ant and anima1 materia1. 2nded. New York∶Gordon and Breach Science Pub[J].1986.154-169.
