蒸汽发生器水位的H2/H∞模型预测控制
2013-10-16王俊玲刘春容
王俊玲,刘春容
(哈尔滨工程大学核科学与技术学院,哈尔滨150001)
在压水堆核电站中,当蒸汽发生器(Steam Generator,简称SG)的水位值超过了安全界限,将引发反应堆停堆事故.SG是一个高度复杂的非线性、时变的非最小相位系统,具有非常小的稳定裕度,低功率段由于蒸汽流量扰动引起的“虚假水位”现象严重,传统的PID控制难以满足SG瞬态情况下的自动控制要求[1].
为了更好地描述系统的非线性时变动态特征,提升控制系统的扰动抑制能力,改善控制系统在低功率工况的控制性能.国内外的研究人员应用现代控制理论和智能控制理论做了相关的研究,也取得了大量的研究成果[2-3].在众多的研究方法中,模型预测控制由于具有良好的跟踪性能和处理约束条件以及时变系统的能力受到了广大的关注、与等[4]设计了SG水位的状态反馈模型预测控制器,Mayuresh等[5]提出了水位LPV模型的模型预测控制.本文在文献[4-5]的基础上将LPV理论、模型预测算法同H2/H∞性能指标相结合,研究了基于SG水位LPV模型的H2/H∞多目标模型预测控制器.
1 SG水位控制系统数学模型
本文通过建立SG水位的多胞LPV模型来近似系统的非线性特性.系统模型的动态特性通过调节参数即SG运行功率p来描述.建立的多胞LPV模型可根据功率的变化而相应的改变.所设计的控制器为变增益控制器[6].

首先,考虑 Irving在 SG的五个功率点的模型[7]:(t)]T是状态量;u(t)是控制输入,为给水流量;qv(t)为蒸汽流量;y(t)为水位;A∈R5×5,B1∈R5×1,B2∈R5×1为系数矩阵;C=[1 1 1 0 0]为常数矩阵.
将模型(1)中的系数矩阵做如下的离散处理[8]:

可得模型(1)在五个功率点的离散模型为:

将SG运行功率区间分为四段:5%≤p≤15%,15% <p≤30%,30% <p≤50%,50% <p≤100%.假设系统状态是可测的,在每个功率段上,考虑系统模型随功率p是线性变化的,离散模型(3)的基础上建立多胞LPV模型:

其中:z(k)为控制输出,F(p)∈R5×5,N(p)∈R5×1,C(p)∈R5×1分别是依赖参数p的多胞形式,C1为系数矩阵.

为营造吸引民间资本的良好氛围,黔东南州组织州直机关及辖区内各县(市)利用“三下乡”、“世界环境日”、水土保持宣传周等大型活动或集会,定期开展形式多样的水土保持生态建设宣传活动,将国家对民间资本参与“四荒”治理等相关政策,特别是对当地政府、部门的扶持、奖补要求及规定向社会各界进行广泛宣传。黄平、雷山、麻江等县还自建网站,宣传民间资本参与水土保持生态建设的成果,同时,政府部门或科研单位建设高标准示范基地,让人们看到参与水土流失、石漠化开发性治理带来的实惠,较好地调动了民间投资者的积极性和主动性。
2 混合H2/H∞鲁棒模型预测控制器设计
考虑SG水位有界扰动的多胞LPV模型(4)以及系统输入约束和状态约束:


将系统模型(4)作为预测模型,系统k+j时刻的预测模型可以表示为:
针对系统(8)和约束(6)~(7),构造状态反馈控制律u(k+j)=Fx(k+j).同时满足以下H∞性能和H2性能要求:

引理 1[9]:对于系统(8),在 k 时刻的状态 x(k),有是给定的参数满足0≤b≤1.如果存在 a >0,γ >0,对称矩阵 Q∈R5×5且 Q>0,Y∈R1×5,对称矩阵 Qω∈R5×5以及参数 q 使得式(11)~(13)成立,那么存在状态反馈控制律M=YQ-1,使得所设计的控制器同时满足上述H∞和H2性能指标,同时也保证了x(k+1)处于椭圆{x|x≤1}内.

引理2[10]:如果引理1成立,存在矩阵V和W使得矩阵不等式(14)~(15)成立,那么状态和输入约束(6)和(7)得到满足.
其中:Vii和Wjj分别是V和W的对角元素;umax为控制输入即SG给水流量的最大值;ymax为SG水位的最大值.
H2/H∞多目标SG水位模型预测控制器的设计问题可以转化为线性矩阵不等式(11)~(15)的求解.先指定一个性能指标,在线优化另一个性能指标,得到状态控制律u(k+j)=M x(k+j),M=YQ-1.
控制器设计过程中的模型预测控制算法如下:
1)将系统模型(4)作为预测模型描述系统未来动态行为见式(8),假定当前时刻为k,通过预测模型(8)和k时刻的系统状态x(k)可以预测未来(k+j)时刻的系统状态x(k+j|k).
2)指定H∞性能指标γ,针对H2性能指标a实行滚动在线优化.在每个时刻k到预测时刻(k+j)这个时域内,通过反复在线计算矩阵不等式(11)~(15)求解状态反馈控制律M,获得从k到(k+j)时刻的控制作用u(k)…u(k+j),但只实施当前时刻的控制作用u(k).在(k+1)时刻时,优化时域向前推进并重复以上的优化计算.
3)采用状态反馈控制形式,形成闭环优化算法.在每次优化前都将 x(k)反馈见矩阵不等式(11),对当前时刻的预测模型进行修正和补偿后,进行(k+1)时刻的优化.
3 控制系统仿真验证
SG水位的H2/H∞多目标模型预测控制器的设计相当于给定γ=0.5,在每个工作区间在线求解下列的优化问题:

本文采用与函数交互运行的方式.本文主要针对SG两个低功率段分别进行仿真验证.系统的采样时间T=0.1 s.仿真时间设置为600 s,在k=10 s加入蒸汽流量阶跃扰动qv=30 kg/s,初始功率为每个功率段的起始端点值,闭环系统的水位和给水流量响应图如图1、2所示.

图1 第1功率段闭环系统响应图
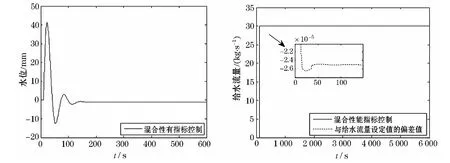
图2 第2功率段闭环系统响应图
由图1、2可知,SG水位采用混合H2/H∞性能指标模型预测控制方法是可行的.对于SG的低功率段存在的严重的“虚假水位”现象,所设计的控制器能有效的控制SG水位,能有效的抑制蒸汽扰动引起的水位波动和给水流量波动.但是控制系统仍存在一定的缺点,即控制系统存在误差.
为了解决预测控制器存在的水位偏差问题,在预测控制器的基础上,增加一个离散的PID控制器用以控制SG水位偏差,构成SG水位H2/H∞多目标鲁棒模型预测控制与PID控制双控制器系统,其结构图如图3所示.

图3 H 2/H∞多目标模型预测控制与PID控制双控制器系统
其中:离散PID控制器的参数整定采用试凑法,预测控制器的设计同前面一致.

图4 第1功率段闭环系统响应图
第1功率段仿真时间设置为1 100 s,第2功率段仿真时间设置为1 000 s.在k=20 s时加入蒸汽流量阶跃扰动30 kg/s,在k=500 s时水位设定值由0 mm阶跃为100 mm.采样时间T=0.1 s.在两个低功率段进行仿真验证,得到闭环系统的水位和给水流量响应图并与SG水位的串级PID控制系统做对比,如图4、5所示.
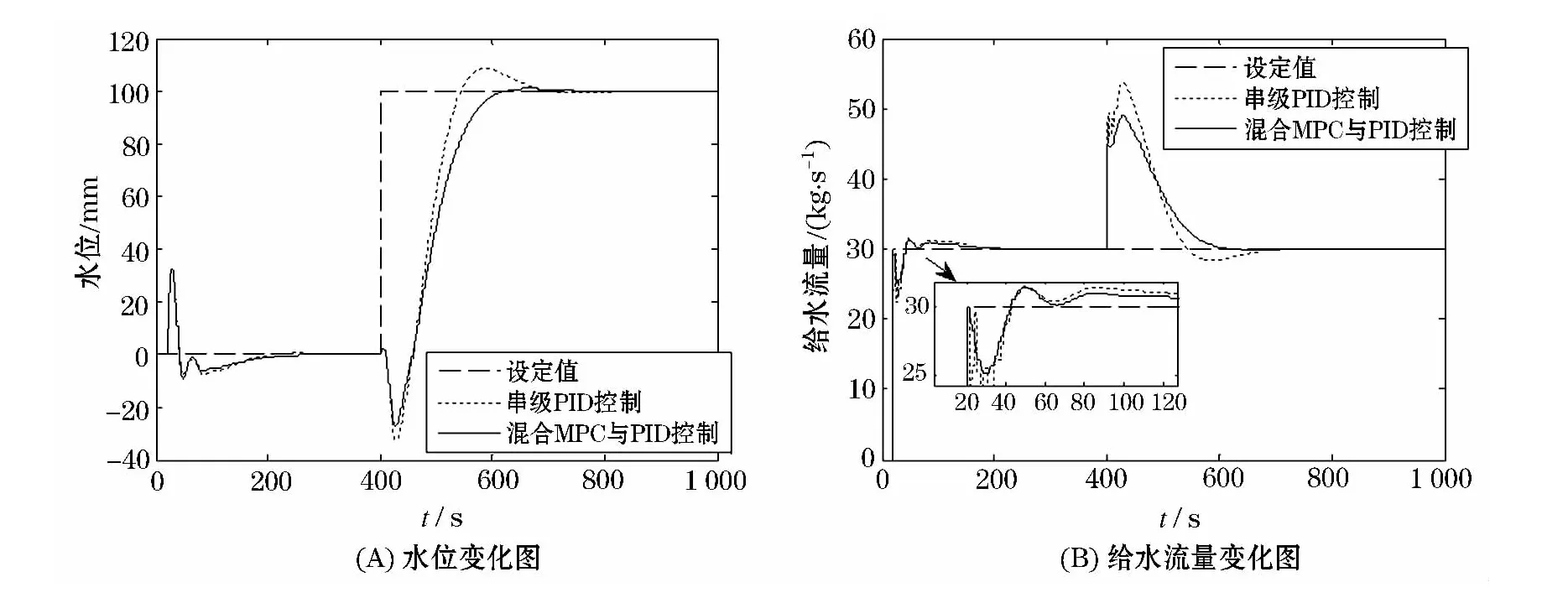
图5 第2功率段闭环系统响应图
由图4、5可以得出:设计的SG水位H2/H∞多目标鲁棒模型预测控制与PID控制的双控制器系统在低功率段(5%≤p≤30%)能稳定,且回调的时间短,超调量小.同串级PID控制系统相比其无论是超调量还是系统稳定时间较小,且与串级PID控制相比具有更好的控制性能.
4 结语
本文针对SG水位控制系统,提出了H2/H∞多目标鲁棒模型预测控制与PID控制双控制器的设计方法.由于是在线优化,当蒸汽流量发生变化时,求解的优化解也随着变化,相应的状态反馈控制律也发生改变,能很好的满足SG水位瞬态情况下的自动控制要求.得到的控制器能够保证系统的闭环稳定性,同时也满足了H2和H∞性能指标.仿真验证此方法在SG水位控制系统中是可行的.
[1]周 刚,彭 威,张大发.核动力蒸汽发生器水位控制方法分析[J].原子能科学技术,2004,38(7):20 -21.
[2]MENON SK,PORLOSA G.Gain-scheduled Nonlinear Control of U - tube Steam Generator Water Level[J].Nuclear Science Engineering,1992,111:294 -308.
[3]IIJIMA T,NAKAJIMA Y,NISHIWAKI Y.Application of Fuzzy Logic Control System or Reactor Feed - water Control[J].Fuzzy Sets and Systems,1995,74(1):61 -72.
[4]KOTHARET M V,METTLER B,MORARI M,etal.Linear Parameter Varying Model Predictive Control for Steam Generator Level Control[J].1997,21:861 -869.
[5]KOTHARET M V,METTLER B.Linear Parameter Varying Model Predictive Control for Steam Generator Level Control[J].Computers Chem.Engng.,1997,21:S861 - S866.
[6]王佩飞.基于多模型的蒸汽发生器水位控制[D].哈尔滨:哈尔滨工程大学,2011:45-46.
[7]IRVING E,MIOSSEC C,TASSART J.Toward Efficient Full Automatic Operation of the PWR Steam Generator with Water Level Adaptive Control[C]//Proceeding of the 2nd International Conference on Boiler Dynamics and Control in Nuclear Power Stations London:British Nuclear Energy Society,1980:309 -329.
[8]卓秀娟.基于T-S模型的蒸汽发生器水位的模糊控制[D].哈尔滨:哈尔滨工程大学,2009:25.
[9]黄 鹤.混合H2/H∞指标鲁棒预测控制器的设计[D].上海:上海交通大学,2011.42-43.
[10]DOYLE JC,CLOVER K,KHARGONEKAR PP.State-Space Solution to Standard and Control Problem[J].IEEE Transactions on Automatic Control,1989,34(8):831-846.
