喉栓式变推力固体火箭发动机压强控制模型分析①
2013-09-26鲍福廷
成 沉,鲍福廷,刘 旸,许 昊
(西北工业大学 航天学院,西安 710072)
0 引言
为提高未来导弹的机动性和突防能力,其动力装置需要具备根据战术要求随机控制推力的能力。实现推力的随机控制将是固体火箭发动机技术领域的重大突破之一。目前,固体火箭发动机推力可调方案很多,其中喉栓式固体火箭发动机,由于其推力可调范围大、可随机调节、响应速度快的特点,成为研究的热点[1-8]。要实现对喉栓发动机推力的精确随机控制,要求发动机气动控制系统的压强响应具有快速性、精确性和稳定性。国外对喉栓式发动机压强响应控制系统进行了一系列研究。CFDRC公司开发的喉栓发动机分析软件APMOD[1]中的控制算法能使喉栓的运动与发动机的压力操作紧密耦合。Bergmans[2]采用了空气涡轮发动机(ATR)中的燃气发生器技术,用详尽的数学模型描述了组件的气动特性,建立了应用于导弹转向和弹射座椅中的喉栓发动机的控制模型,实现了喉栓运动的闭环压力控制。该模型的仿真结果很好地预示了喉栓运动状态改变时的推力反向脉冲现象。但该模型中的参数需要根据对特定的发动机进行实验来确定,不具备通用性。国内对喉栓发动机的研究处于起步阶段,对气动控制系统的原理性研究主要是通过实验和流场仿真来分析压强响应过程。西北工业大学的魏祥庚等[3]通过实验分析了非同轴式喉栓发动机的响应特性。北京理工大学的王佳兴等[4]通过流场仿真对压强响应的影响因素进行了分析。流场仿真的方法直观,成本低,但计算量大,计算过程复杂,并且考虑到闭环控制系统复杂的反馈特性,流场仿真现在只能对开环控制的喉栓系统进行分析。而实验方法成本高昂,次数有限。建立计算简单的实用模型不仅对实验的设计有指导意义,提高实验的效率,并且能提供快速的工程估算方法。
本文运用控制工程的方法,将喉面-压强响应系统近似为一阶线性气动控制系统,通过建立传递函数,对影响压强响应的因素进行了分析。为提高计算精度,进一步修正了传递函数,对采用开环控制的喉栓发动机系统进行求解,得到了压强响应及理论响应时间。
1 传递函数
用拉氏变换法求解线性系统的微分方程,可得到控制系统在复数域中的数学模型——传递函数。传递函数为线性定常控制系统输出与输入2个量的拉氏变换之比,它不仅可表征系统的动态性能,而且可以用来研究系统的结构或参数变化对系统性能的影响[9]。喉栓式发动机的气动控制系统为喉面-压强响应系统。现推导其传递函数。
1.1 传递函数推导
假设喉栓发动机喷管内部为一维定常等熵流动,其压强响应数学模型可以用式(1a)表示:

由于压强响应时间很短,忽略自由容积与燃面面积的变化,可将其视为定值。
上述微分方程为非线性方程。欲建立线性模型,需对Pnc和PcAt两项进行线性化近似处理。为了降低线性化近似误差,先对式(1a)进行变形。
设Pc0为初始平衡压强,将式(1a)变形为

1.2 影响压强响应的因素分析
由于误差仅来自于线性化的过程,只会对含n的项产生影响,因此不影响对其他参数的定性分析。下面用传递函数对采用开环控制的喉栓发动机压强响应影响因素进行定性分析,并验证分析结果。
(1)压强响应影响因素的定性分析
金融资源和实体经济之间存在着密不可分的关系,单独的金融资源很难发挥自身应有的功能和作用,而实体经济就是金融资源发挥自身作用的完美平台,只有当金融资源完全融入到实体经济中,才能完整地体现出金融对经济的促进作用。
一阶线性定常系统中,时间常数T0是系统的固有特性,反应了系统响应的快慢,决定了压强响应时间。当t=4T0时,系统响应将达到稳态值的98.2%,可认为系统达到稳态,此时认为系统压强响应时间为4T0。从T0表达式可看出,c*、At0、Γ2/Vc与响应时间成反比。而ρp、Ab、a对T0没有影响,所以不影响响应时间。
(2)分析结果验证
依次改变以上各参数,用四阶龙格库塔法求解原方程,同样按照系统响应达到稳态值98.2%的标准来求取响应时间。图1为改变c*时,响应时间的变化曲线,该结果与用传递函数方法分析所得出的结论完全一致。同样,在改变At0、Γ2/Vc时,得到的结论也完全相同;而改变ρp、Ab、a时,响应时间完全没有变化。
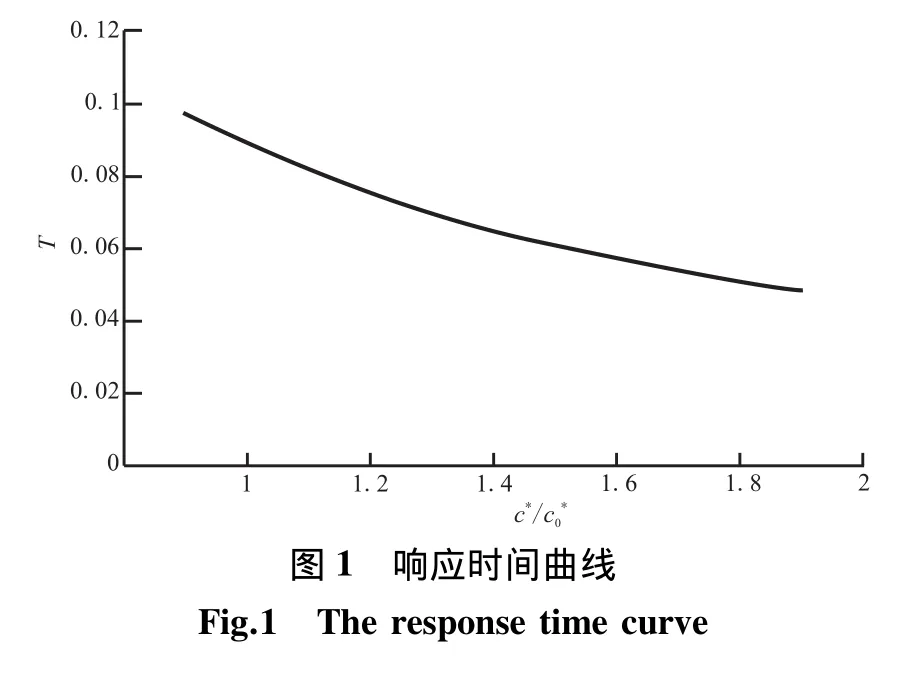
可以看出,分析传递函数的方法很好地说明了这几个参数对响应时间的影响。从理论上解释了Vc越小,Γ、c*、At0越大,压强响应越快,是因为它们影响了压强响应系统的时间常数;而ρp、Ab、a不影响压强响应时间,是因为它们不影响系统时间常数。At0越大,响应越快,说明同样的调节比,正向调节(喉部面积减小,压强升高)比逆向调节(喉部面积增大,压强降低)要慢,这与魏祥庚等人做的实验[3]中观察到的现象一致。
1.3 传递函数误差分析
考虑系统的阶跃响应,即原方程中At为常数At1,Pc初值为Pc0时的响应,此时的输入量为

图2和表1将用式(11)计算的解析解与原方程用四阶龙格库塔法得到的数值解进行了对比。可见,当ε1偏离1不太大时,用传递函数计算压强响应的误差较小,但随ε1偏离1的程度增大,误差将越来越大。这是由于ε1偏离1的程度越大,线性化的误差越大。为了提高精度,需要对传递函数进行线性化修正。

表1 解析解与数值解的误差Table 1 Comparison between the numerical solution and the analytical solution

1.4 传递函数线性化修正
对传递函数加入修正系数,依次对稳态项和时间常数进行修正。
(1)稳态项的修正

(2)时间常数的修正
考虑模型的误差来自于方程的线性化,用初始点来对方程进行线性化,导致了变量对初始点的偏离越大时误差越大。若能根据变量与初始点的偏差选择用来线性化的点,就能减小线性化的误差,提高精度。
将式(4)代入式(3),得到线性方程:
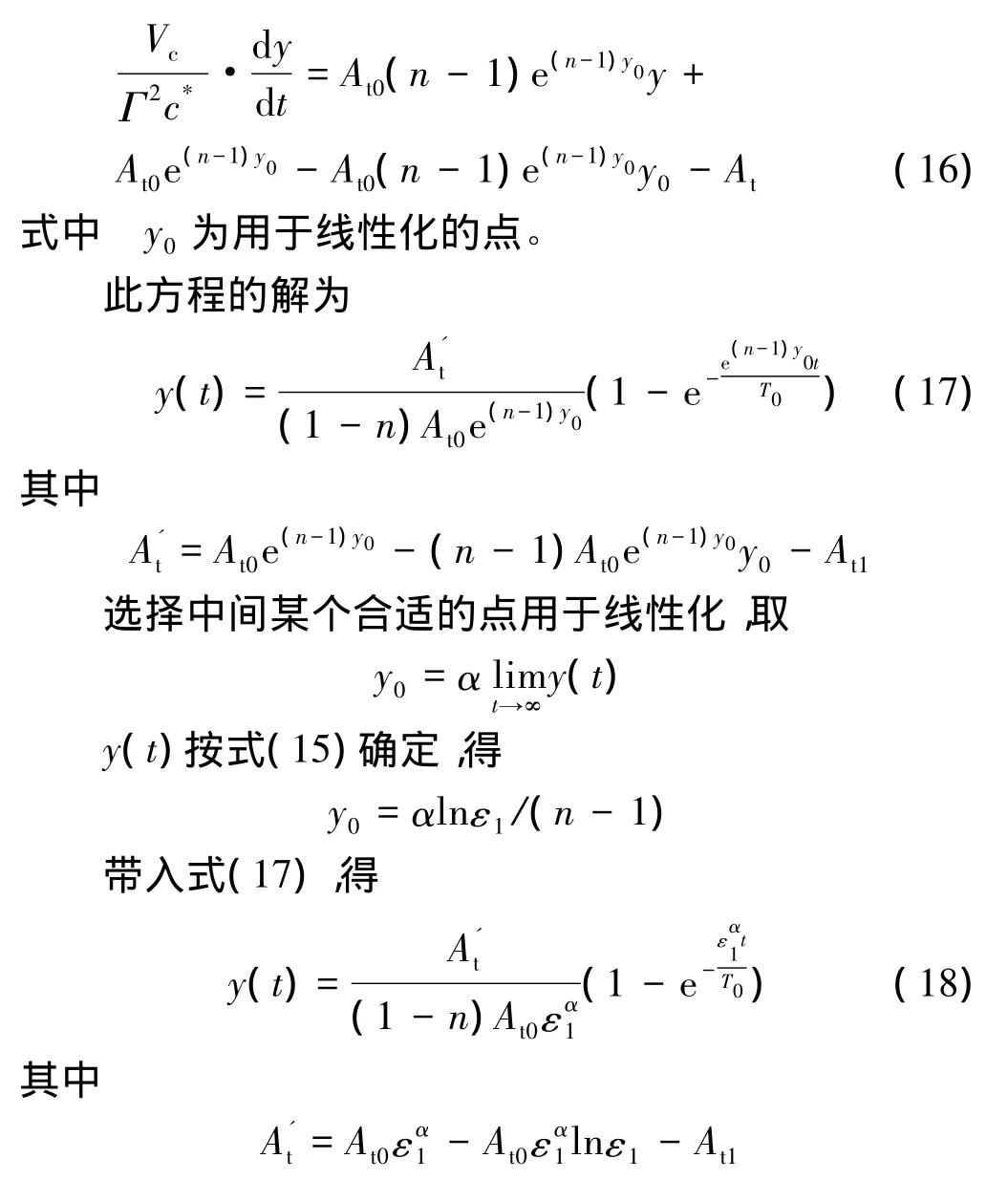
上式的稳态项不如式(15)准确,只用它来修正时间常数。
得到传递函数:

选择合适的α取值,就能得到较好的结果。经过一系列计算发现,取α=0.71时,误差较小。由于误差的大小只与ε1有关,而与所计算的压强范围及发动机设计参数无关,所以可以取定α=0.71。表2和图3将不同ε1下的解析解与用四阶龙格库塔法求的数值解进行对比,可以看出误差已经明显减小。
综上所述,得到喉面-压强响应系统的传递函数:

式中 K′为稳态项;T′为时间常数。
经线性化修正的传递函数虽然精度提高了很多,但并不是严格意义上的传递函数,因为其中包含了输入项ε1,不妨称之为伪传递函数。它可用来求解采用开环控制系统的喉栓发动机的压强响应曲线。

表2 解析解与数值解的误差Table 2 Comparison between the numerical solution and the analytical solution

2 开环控制系统分析
2.1 开环系统压强响应计算
采用开环控制系统的喉栓发动机的气动控制模型可认为是喉面-压强响应系统的斜坡响应,喉栓的运动速度反应为斜坡响应的斜率。
开环系统传递函数:

得到压强响应的解析解为

解方程y(t)=(1-Δ)y(∞),求得开环控制系统的压强响应时间为

式中 Δ为允许误差范围,本文Δ=0.01,即认为系统响应将达到稳态值的99%时的时间为响应时间。
2.2 误差分析
斜坡响应微分方程为

表3给出了用四阶龙格库塔法求解此方程的数值解与式(28)计算出的解析解的对比,结果表明误差在可接受范围内。
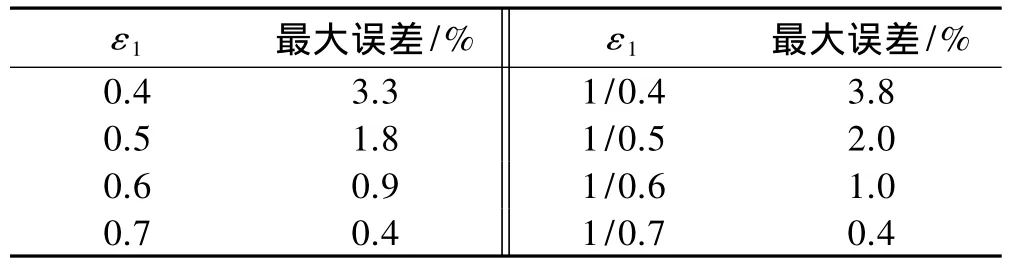
表3 解析解与数值解的误差Table 3 Comparison between the numerical solution and the analytical solution
2.3 压强响应延迟分析
根据上述计算得出的结果,从响应时间上来看,发动机的压强响应相对于喉栓运动速度的延迟只与时间常数T′有关。图4表示了不同的时间常数T′下,响应时间随喉面调节时间Tv的变化。
由图4可看出,各个T′下的响应时间与图中的实线对比(实线为喉面调节时间Tv),时间常数越大,响应相对于喉栓运动的延迟越明显。设计发动机时应尽量减小时间常数T′。若 T′能达到0.01 s,压强响应相对于喉栓的运动可以几乎没有延迟,此时压强响应基本取决于喉栓运动的速度。
3 结论
(1)喉栓发动机的压强响应系统可以用一阶线性模型近似表达。用建立传递函数的方法求解压强响应曲线能得到压强响应的近似解析解,并求得响应时间表达式,解的精度能满足要求。为喉栓发动机的压强响应提供了快速估算的方法。
(2)对传递函数的分析得出了喉栓发动机设计参数对压强响应的影响规律。分析表明,Vc越小,Γ、c*越大,压强响应越快;ρp、Ab、a不影响压强响应时间;同样的调节比,正向调节(喉部面积减小,压强升高)比逆向调节(喉部面积增大,压强降低)响应速度慢。
(3)对应用开环系统的喉栓发动机响应时间分析可以得出:时间常数T′越大,压强响应相对于喉栓运动的延迟越明显。设计发动机时应尽量减小时间常数T′。若T′达到0.01 s,压强响应相对于喉栓的运动可以几乎没有延迟,此时压强响应基本取决于喉栓运动的速度。
[1]Ostrander M J,Bergmans J L,Thomas M E,Burroughs S L.Pintle motor challenges for tactical missiles[R].AIAA-2000-3310.
[2]John L Bergmans,Robert I Myers.Throttle valves for air turbo-rocket engine control[R].AIAA-97-3188.
[3]魏祥庚,何国强,李江,等.非同轴式喉栓变推力发动机压强响应分析[J].固体火箭技术,2009,30(4):409-412.
[4]王佳兴,魏志军,王宁飞.喉栓发动机压强响应速率影响因素分析[J].科技导报,2012,30(2):18-21.
[5]张淑慧,胡波,孟雅桃.推力可控固体火箭发动机应用及发展[J].固体火箭技术,2002,25(4):12-15.
[6]李娟,王占利,郑凯,等.喉栓式推力可调固体火箭发动机动态响应特性数值分析[J].固体火箭技术,2009,32(1):48-52.
[7]王毅林,何国强,李江,等.非同轴式喉栓变推力固体发动机试验[J].固体火箭技术,2008,31(1):43-46.
[8]滑利辉,田维平,甘晓松,等.喉栓式推力可调发动机喷管流场数值模拟[J].固体火箭技术,2008,31(4):344-349.
[9]胡寿松.自动控制原理[M].3版.北京:国防工业出版社,2000.
