含时滞的半主动系统动力学分析*
2013-09-17田佳雨申永军赵永香
田佳雨 申永军 赵永香
(石家庄铁道大学,石家庄 050043)
含时滞的半主动系统动力学分析*
田佳雨 申永军†赵永香
(石家庄铁道大学,石家庄 050043)
对含时滞的半主动相对控制悬架系统进行了近似解析研究.首先建立了半主动相对控制1/4车体模型,进行了无量纲化处理,利用平均法建立了系统的近似解析解应该满足的四元代数方程组,然后利用数值方法进行了求解.随后通过MATLAB仿真得到了含时滞的半主动相对控制悬架系统的数值解,并且和近似解析解进行了比较,发现二者具有较好的符合精度,说明近似解析解的正确性.
时滞, 平均法, 相对控制策略, 近似解析解
引言
自20世纪70年代以来,工业发达国家开始研究基于振动主动控制的主动/半主动悬架系统[1-3].在我国,半主动悬架方面的研究工作起步较晚,近年来已经取得了一定的成果.悬架作为现代汽车的重要组成之一,它对汽车的乘坐舒适性和行驶安全性有着重要的影响.传统的被动悬架的参数是固定的,只有在车速和路面状况某一特定的组合下才能达到最优.而主动/半主动悬架具有一定的在线调节能力,性价比相对优良,受到了国内外汽车工业界的广泛重视.
需要注意的是,虽然半主动悬架系统有较好的综合控制效果,但其系统内存在不可避免的时滞因素,半主动悬架系统的时滞及其导致的失稳现象严重影响实际应用,所以在考虑控制策略的同时研究时滞对半主动悬架系统的影响显得非常重要.半主动悬架系统的时滞主要来自于:①测量信号从传感器至控制计算机的传输时滞;②计算控制律引起的时滞;③控制信号从计算机传至作动器的传输时滞;④作动器的时滞等.以往工程界通常采用忽略时滞的影响来简化问题,从20纪90年代起,国内外工程界和学术界开始更加关注对时滞系统的研究[4-6].但是针对半主动控制这种强非线性系统的时滞特性研究较少.
半主动悬架的控制方法种类繁多,但是各种方法均有利弊,而此文主要探讨相对控制策略.相对控制策略的设计目的是为了最大限度地减小传到车体上的力,从而起到隔振的效果.因为相对控制策略的阻尼力是分段线性的,所以该文采用平均法来研究相对控制策略的振动控制效果.
1 半主动相对控制悬架分析
1.1 半主动相对控制策略简介
为了达到较好的隔振的效果,就要最大限度地减小传到车体上的力.悬架在振动过程中,弹簧力和阻尼力将交替出现相同的作用方向和相反的作用方向.为了把传递力减小到最小值,则当弹簧力和阻尼力同向时,可把阻尼系数设为最小;当弹簧力和阻尼力反向时,就把阻尼系数切换到最大值.这种控制称为相对控制,相应控制规律由公式描述为:

其中,ζ2是悬架系统的阻尼比,xs和xs分别为车体绝对位移和绝对速度,xt和xt分别为轮胎绝对位移和绝对速度.
1.2 系统模型的建立
悬架系统是一个非常复杂的系统,存在着大量的不确定性、时变性和非线性.考虑到对于这样的系统精确建模极为困难,因此必须根据研究的目的和需要做出合理的简化.半主动悬架系统包括轮胎、车身、悬架弹簧和减振器等部件.考虑到1/4车体模型的简单性、普遍性和便于实验研究的特性,该文采用如图1所示的1/4车体模型作为半主动悬架系统的模型.
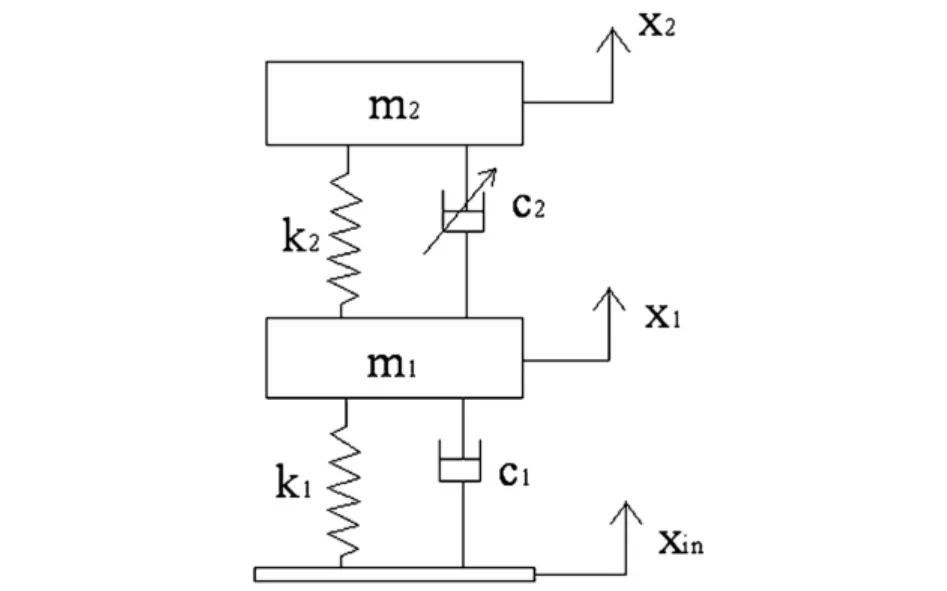
图1 1/4车辆2自由度振动系统模型Fig.1 a quarter two degree-of-freedom vehicle model
其中,m1、k1、c1分别为轮胎质量、轮胎刚度和轮胎阻尼系数;m2、k2、c2分别为悬架质量(1/4车身质量)、悬架弹簧刚度和可调阻尼器的阻尼系数;xin为路面干扰且有xin=bcos(ωt),b为常数.
由牛顿第二定律,系统的运动微分方程为:

考虑控制过程中的时滞,方程(2)转换为:

1.3 相对控制策略下系统的近似解析解
为了求方程(3)的解析解,先作以下代换:

将以上各式代入方程(3),得到:
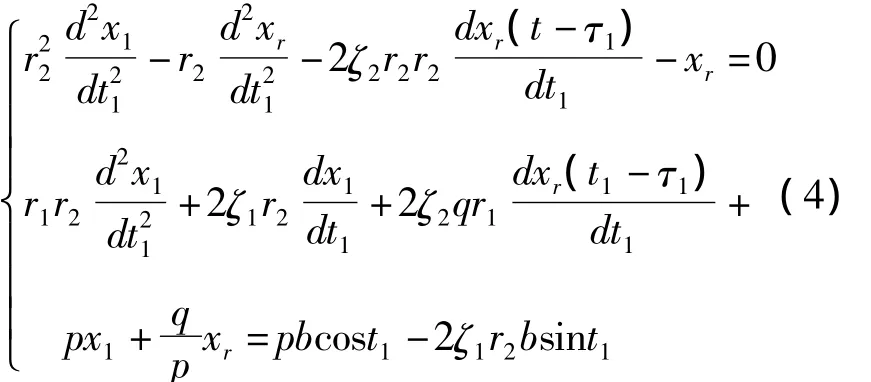
其中,ζ1是轮胎的阻尼比,ζ2是可调悬架阻尼器的阻尼比.
为简单起见,用t代替t1,用τ代替τ1,这样也不会影响分析结果.下面应用平均法解方程,设解的形式为:
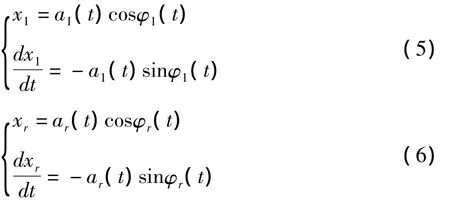
其中 φ1(t)=t+θ1(t),φr(t)=t+θr(t).则式(5)、(6)通过微分变成如下形式:带入方程(7),将(6)中的
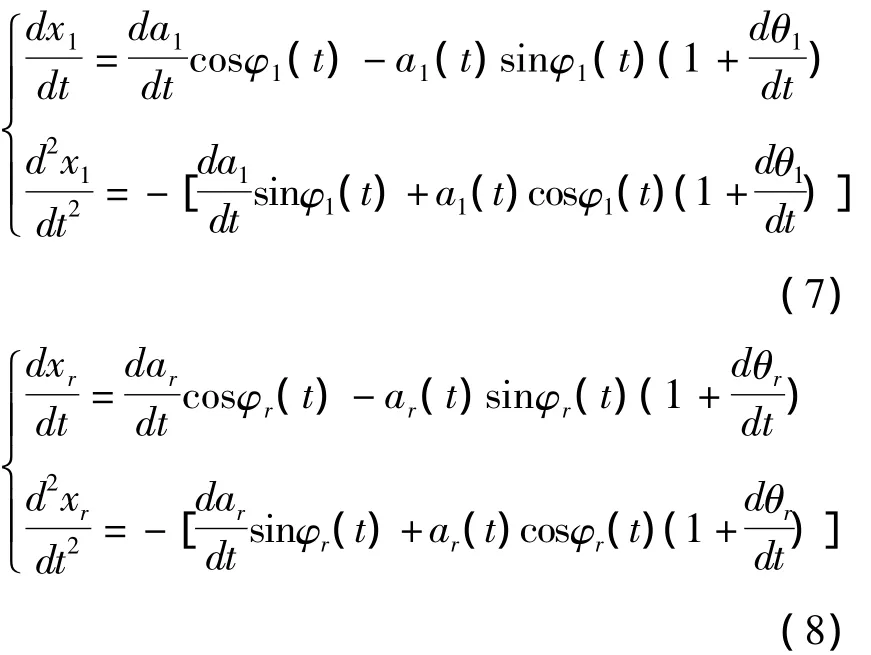

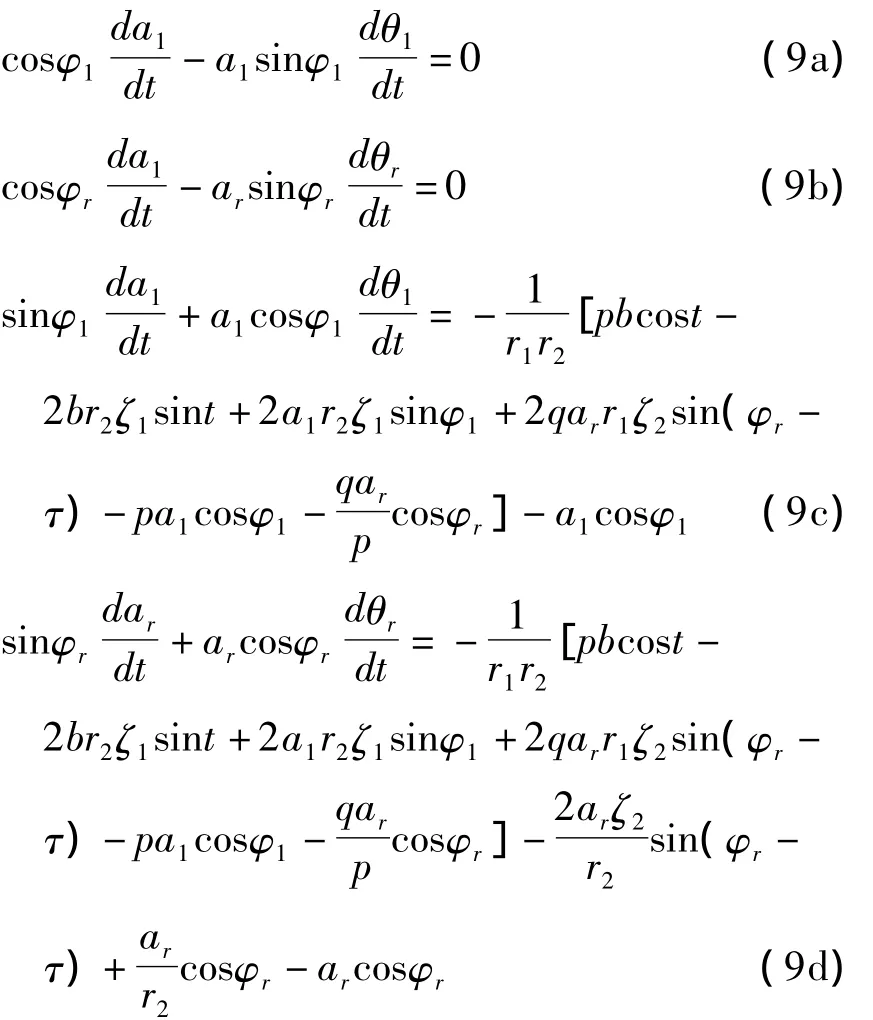
由方程(9)解得:

方程(10)在平均法中被称为关于振幅和相位的标准方程.
接下来通过对方程(10)的右侧在一个周期(如 φi=[0 2π],i=1,r)进行积分平均来得到振幅导数和相位导数的近似解.由于文中采用相对控制策略,式(1)中的控制逻辑可改写为:

其中ζmax为最大阻尼比,ζmin为最小阻尼比,xr表示轮胎相对于悬架的位移,xr表示相对速度.式(11)也可写成:


由于xr=arcos(t+θr),xr=-arsin(t+θr),式(12)可转换为:

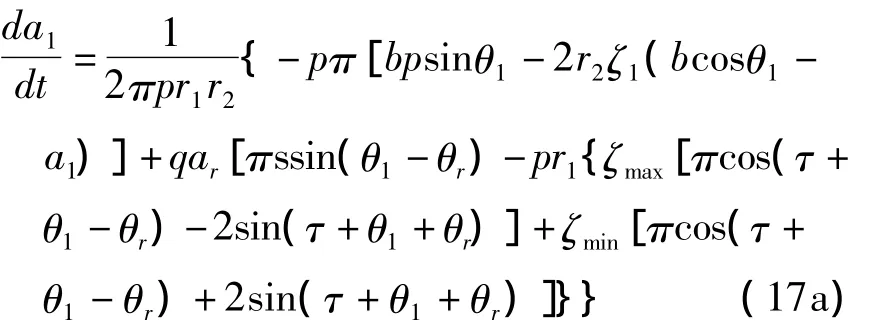
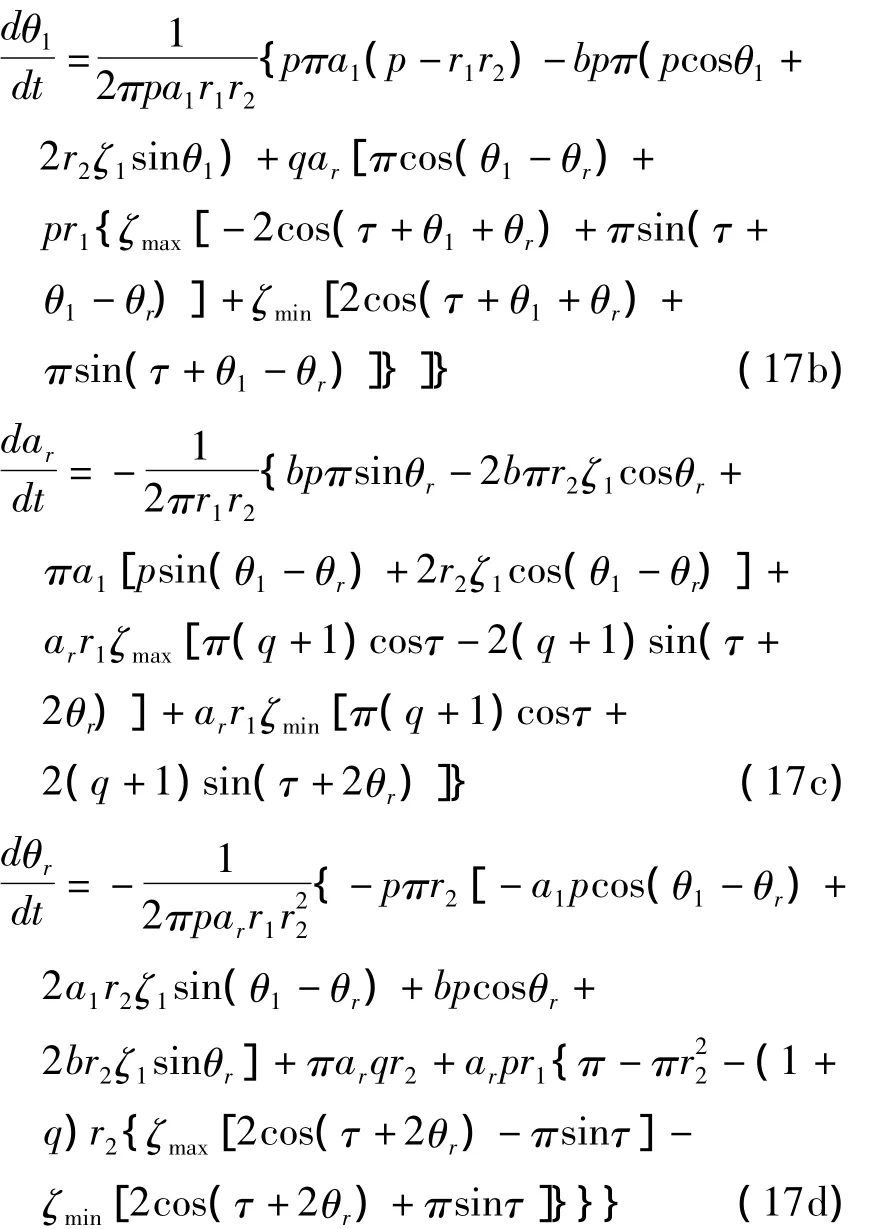
由平均法可知,悬架系统的近似解析解为:

由式(15),计算式(16)的结果如下:

2 近似解析解和数值解的比较分析
研究系统(4),选取基本参数如表1所示.根据式(17)可画出幅频曲线如图2实线所示.同时,为了进行比较,此文采用MATLAB中的DDE工具箱来研究系统(4),每一个激励频率下的计算时间为300s,将前200s响应略去并取后100s响应的最大值作为稳态响应的幅值,所得数值积分的结果也示于图2,以圆圈表示,可见二者的吻合程度较好,尤其是在低频段,高频段吻合程度虽然较低但是变化趋势一致,且第二阶共振频率也较为一致.
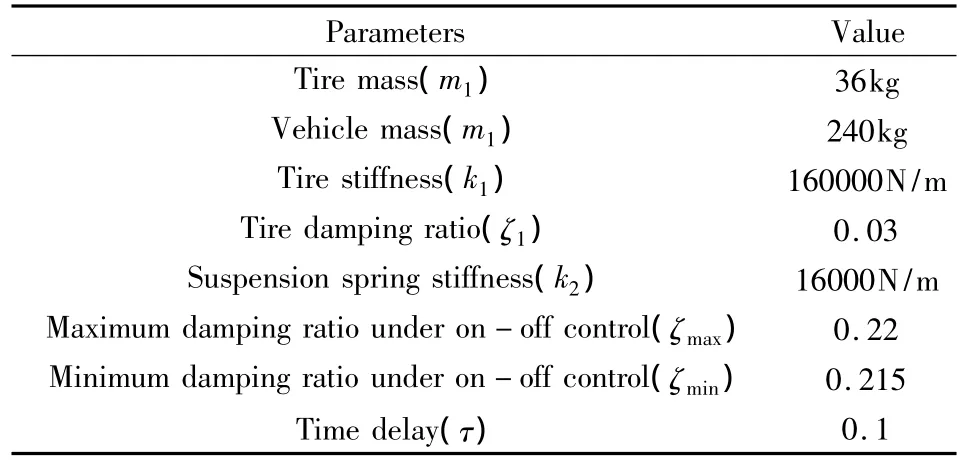
表1 基本系统参数Table 1 Basic System Parameters

图2 近似解和数值解的幅频曲线Fig.2 Amplitude-frequency curves of the approximately analytical solution and numerical solution
3 结论
通过研究相对控制策略下的含时滞的半主动悬架系统,利用平均法得到了系统的近似解,并与数值仿真作了比较,证实了利用平均法分析本系统所得结论的合理性与准确性,也说明了相对控制策略具有较好的控制效果.该方法可以推广至其它类型的半主动控制系统.
1 Karnopp D,Crosbym M J,Harwood R A.Vibration control using semi-active force generators.Journal of Engineering for Industry,1974,96(2):619~626
2 Kim H,Yooh Y S.Semi-active suspension with preview using a frequency-shaped performance index.Vehicle Systems Dynamics,1995,24:759~780
3 Ahn Y K,Morishita S.Adaptive vibration control by a variable-damping dynamic absorber using ER fluid.Journal of Vibration and Acoustics,1999,121(7):373~378
4 张文丰,翁建生,胡海岩.时滞对车辆悬架“天棚”阻尼控制的影响.振动工程学报,1999,12(4):486~491(Zhang W F,Weng J S,Hu H Y.Effect of time delay on active vehicle suspensions equipped with “Sky-Hook”Damper.Journal of Vibration Engineering,1999,12(4):486~491(in Chiniese))
5 申永军,杨绍普,刘献栋.采用磁流变阻尼的一种改进型半主动控制汽车悬架研究.振动、测试与诊断,2001,21(4):253~257(Shen Y J,Yang S P,Liu X D.Studies on improve type of semiactive car suspension with magnetorheological damper.Journal of Vibration,Measurement&Diagnosis,2001,21(4):253~257(in Chiniese))
6 Hu H Y,Wang Z H.Stability of linear time variant dynamic systems with multiple time delays.Acta Mechanica Sinica(English Series),1998,14(3):274~282
7 胡海岩,王在华.非线性时滞动力系统的研究进展.力学进展,1999,29(4):501~512(Hu H Y,Wang Z H.Review on nonlinear dynamic systems involving time delays.Advances in Mechanics,1999,29(4):501 ~ 512(in Chiniese))
8 徐鉴,裴利军.时滞系统动力学近期研究进展与展望.力学进展,2006,36(1):17~30(Xu J,Pei L J.Advance in dynamics for delayed systerns.Advances in Mechanics,2006,36(1):17~30(in Chiniese))
*This Project supported by the National Natural Science Foundation of China(11072158,10932006),the Natural Science Funds for Distinguished Young Scholar of Hebei Province,China(E2010002047),the Program for New Century Excellent Talents in University,and the Program for Changjiang Scholars and Innovative Research Team in University of Ministry of Education of China(IRT0971)
† Corresponding author E-mail:shenyongjun@126.com
DYNAMICAL ANALYSIS OF SEMI-ACTIVE SYSTEM WITH TIME-DELAY*
Tian Jiayu Shen Yongjun†Zhao Yongxiang
(School of Mechanical Engineering,Shijiazhuang Tiedao University,Shijiazhuang050043,China)
The approximately analytical solution for a semi-active suspension system under relative control with time-delay is investigated in this paper.At first,the quarter-car model is established and dimensionless analysis is done.Then a system of four nonlinear algebra equations for the approximate solution is obtained by the averaging method,which could be easily treated by numerical methods for algebra equations.At last,the numerical solution of the semi-active relative-control suspension system is also obtained through the simulation in MATLAB software.The comparison of the two methods shows the approximately analytical solution is correct and has satisfactory precision.
time-delay, averaging method, semi-active control, approximate solution
21 April 2012,
8 July 2012.
10.6052/1672-6553-2013-011
2012-04-21 收到第 1 稿,2012-07-08 收到修改稿.
*国家自然科学基金(11072158,10932006)、河北省杰出青年科学基金(E2010002047)、教育部新世纪优秀人才项目和教育部创新团队发展计划项目(IRT0971)资助
E-mail:shenyongjun@126.com
