摆杆式操作机钳杆平升降缓冲刚度与阻尼研究
2013-09-09何琪功同新星
杨 晋,何琪功,同新星
(1.兰州交通大学 机电工程学院,兰州 730070;2.兰州兰石重工有限公司,兰州 730050)
我国锻造操作机研究起步晚,水平相对落后,与国际先进水平有较大差距[1]。随着大型锻件需求日益增多,锻造设备研究与设计得到发展与重视[2],国家973计划设立的“巨型重载操作装备基础科学问题”研究项目,为巨型重载操作装备系统自主化设计开发奠定了理论基础[3]。
轨道式全液压驱动的大型锻造操作机主要有摆动杠杆式与平行连杆式两种结构形式。主要运动包括钳杆平升降、钳杆倾斜、钳杆左右侧移、钳杆旋转、钳口开闭及操作机大车行走等。在实现钳杆平升降与倾斜的吊挂系统中,缓冲装置是减小振动与冲击力的重要部件,亦是重载操作机设计关键。文献[4]借鉴机器人学研究成果并引入相应的评价指标,通过对锻造工艺分析及与传统工业机器人对比,应用旋量理论计算操作机的雅可比矩阵,建立动力学模型,对两种锻造操作机各项性能进行对比,为操作机设计与优化提供参考依据。文献[5]将建立的操作机三维实体模型导入ADAMS系统,据实际使用工况施加约束及载荷,建立虚拟样机,通过不同的动力驱动,对虚拟样机模型进行动力学仿真,为锻造操作机零部件合理设计提供依据。文献[6]对操作机缓冲装置冲击力及冲击行程进行分析计算,为锻造操作机合理配置缓冲装置提供参考。
本文以摆动杠杆式操作机钳杆平升降运动为例,建立吊挂系统动力学模型,获得吊挂系统中杆件运动规律;研究缓冲装置刚度、阻尼与系统振动之关系,为合理设计缓冲装置提供依据。
1 系统物理模型
操作机缓冲装置由液压缸和蓄能器组成,两者相互连通,液压缸传递力,蓄能器实现缓冲与减震。摆动杠杆式锻造操作机吊挂结构如图1所示。
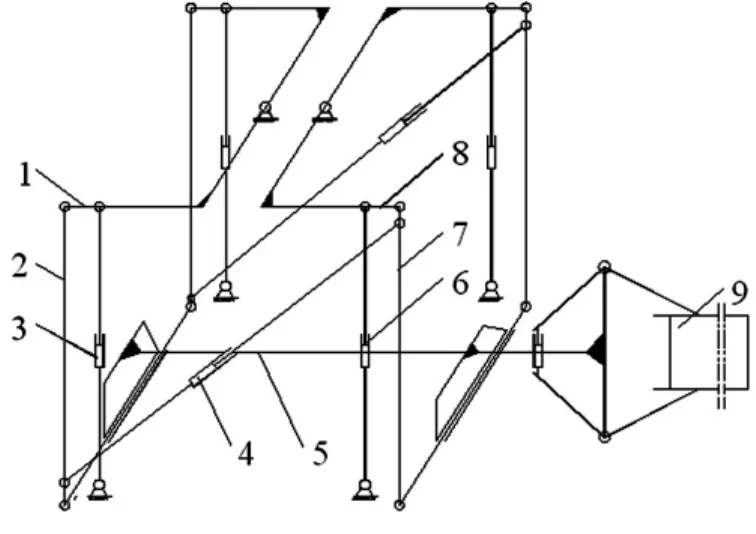
图1 锻造操作机吊挂结构Fig.1 Forging manipulator’s hanging system
对称于钳杆中心线布置的活塞缸3、柱塞缸6、前吊杆7、后吊杆2及左缓冲缸4组成钳杆5的吊挂系统。缓冲缸连接在前吊杆及后吊杆上。活塞缸3和柱塞缸6同时升降驱动前臂8及后臂1,带动前后吊杆与钳杆实现上下移动。由于钳口夹持锻件,造成整个钳杆重心向前移动,在锻件升降、倾斜时会产生较大冲击力与惯性力。通过左右缓冲缸由蓄能器吸收、缓解该冲击力及惯性力,以保证锻造过程中钳杆的平稳运动。
摆动杠杆式锻造操作机吊挂结构对称于钳杆中心线布置,进行机构动力学分析时,以中心假想平面结构简化吊挂系统力学模型,用刚度、阻尼等效缓冲装置,钳杆及工件质量由集中质量代替,忽略前后臂、吊杆质量,并假设全部为刚性杆。系统物理模型如图2所示。

图2 吊挂系统物理模型Fig.2 The physical model of hanging system
图2中:L1为前后臂长度(m);L2为前后吊杆长度(m);L3为钳杆架两端支撑距离(m);L4为前后臂之间距离(m);L5为钳杆后支撑到整个钳杆系统重心距离(m);L6为钳杆架高度(m);L7为钳杆水平最低位时缓冲装置两端距离(m);L8、L9为缓冲装置连接位置(m);L10为钳杆最低位时重心垂直方向位移(m);θ1为后臂与x正方向夹角(°);θ2为后吊杆与x正方向夹角(°);φ为前臂与x正方向夹角(°);φ1为钳杆与x正方向夹角(°);φ2为前吊杆与x正方向夹角(°);J为钳杆绕前支撑D点转动惯量(kg·m2);K为缓冲装置等效刚度;C为缓冲装置等效阻尼;M1为施加在前臂上扭矩(N·m);M2为施加在后臂上扭矩(N·m)。
2 系统动力学模型
常用动力学建模方法有牛顿法、达朗贝尔原理、凯恩法、拉格朗日法等,各有特点,适合不同系统建模[7]。据吊挂系统特点,本文采用拉格朗日法建立模型。
锻造操作机在平升降时,前、后臂始终保持一致,为2自由度机构。据模型建立的难易程度选择广义坐标为:

2.1 动能分析
(1)非广义坐标表示
据前后臂运动关系有:

据图2吊挂系统模型,利用矢量封闭法建立方程[8]:

求解方程得:

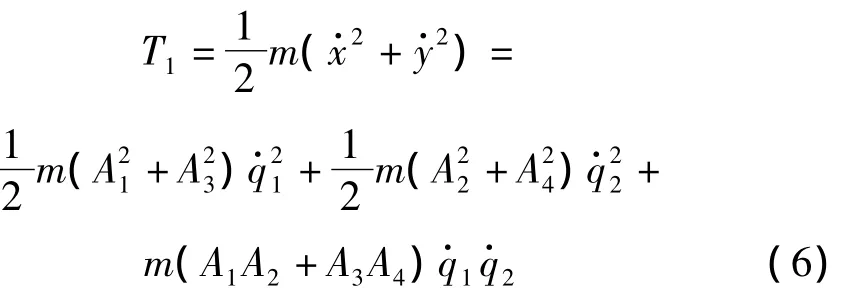
(2)平动动能
夹持工件后钳杆质心G的坐标为:

式中:

钳杆转动动能为:

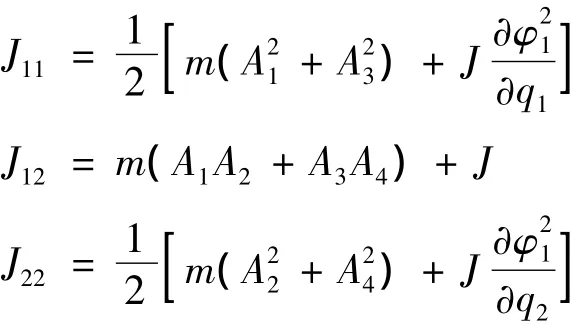
由式(6)、式(7)得吊挂系统动能为:

式中:
2.2 势能分析
吊挂系统势能包括钳杆重力势能与缓冲装置弹性势能[9]。以吊挂系统处于最低位置、钳杆水平作为势能零点,此时弹簧两端距离为L7,图2中P、Q两点距离为:

式中:
最低位置为-L10时,分析得系统势能为:

2.3 耗能函数
研究系统运动方程时,缓冲装置阻尼为重要耗散元件,阻尼器两端几何关系见图3。

图3 几何关系Fig.3 Geometrical relationship
图3中,PQ直线与水平方向夹角为:

据式(11),耗能函数为:

式中:
2.4 拉格朗日方程
据拉格朗日法建模原理,含耗散阻尼系统第二类拉格朗日方程[10]为:


式中:
3 计算分析
以50 kN操作机为例,平升降机构匀速升降两个周期,在Matlab中求解动力学模型。
无缓冲装置时,前后吊杆摆动范围为12°左右,二者运动规律基本一致,摆动角度相差不大,如图4所示。由前后吊杆摆角差引起的钳杆摆角 φ1变化为1.2°(图5)。工件质心在垂直方向实现了匀速升降及位移要求(图6(a)),但在水平方向摆动明显,变化范围约300 mm(图6(b)),对正常锻造过程影响较大。
在吊挂系统平升降运动中,影响锻造操作机工作的主要因素为钳杆水平摆动及倾斜。因此,选择合理的缓冲刚度及阻尼,减小工件质心在水平方向的摆动量与钳杆摆角φ1变化是缓冲装置设计关键。若在吊挂系统中增加缓冲装置且预选刚度K=8×105N/m、阻尼C=2×103N·s/m时,工件质心水平位移变化曲线见图7;钳杆摆角φ1变化曲线见图8,钳杆整体摆动明显下降。
虽缓冲装置能改善工件质心在水平方向的摆动量及钳杆倾斜量,但同时会产生一定附加力,造成吊挂杆件受力情况复杂。因此,确定合理的缓冲装置刚度及阻尼对吊挂系统运动与受力极为重要。工件质心变化范围ξ1与缓冲装置刚度K及阻尼C的关系见图9、图10。钳杆摆角φ1变化范围ξ2与缓冲装置刚度K及阻尼C的关系见图11、图12。
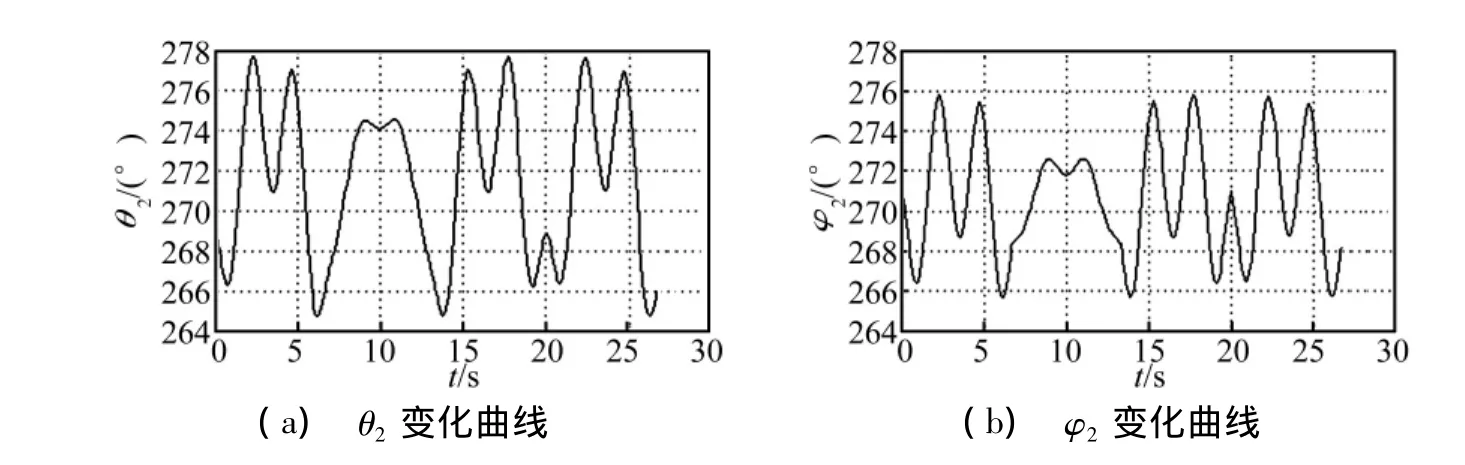
图4 无缓冲吊杆变化曲线Fig.4 No-buffering hanging bar’s transforming curve
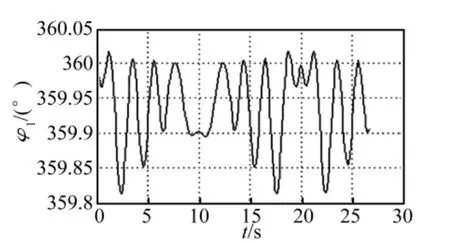
图5 无缓冲φ1变化曲线Fig.5 φ1’s Transforming curve in no-buffering condition
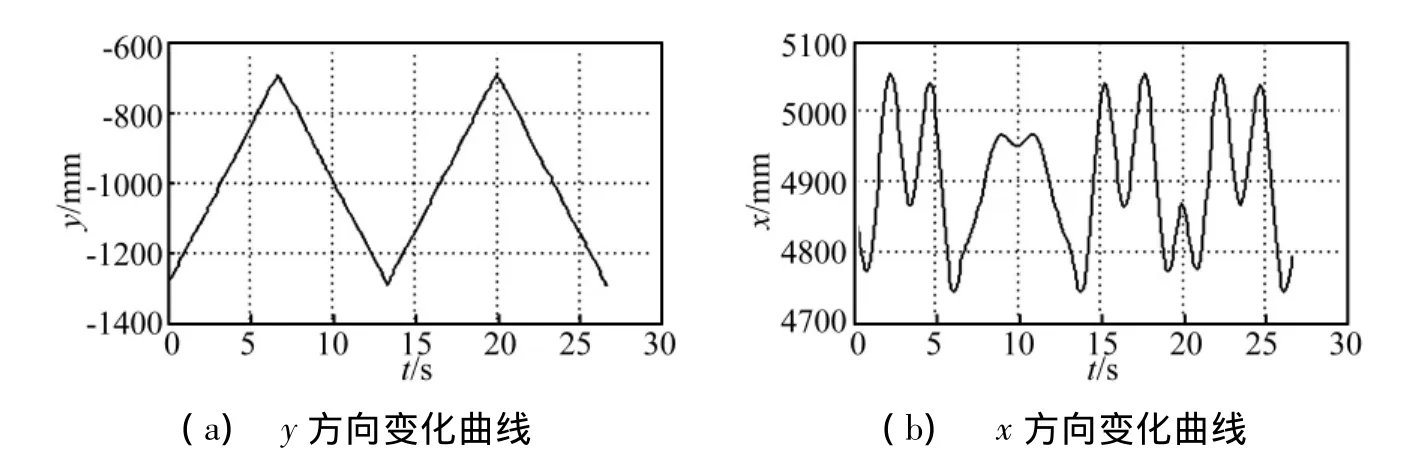
图6 无缓冲时工件质心变化曲线Fig.6 Workpiece centroid transforming curve in no-buffering condition
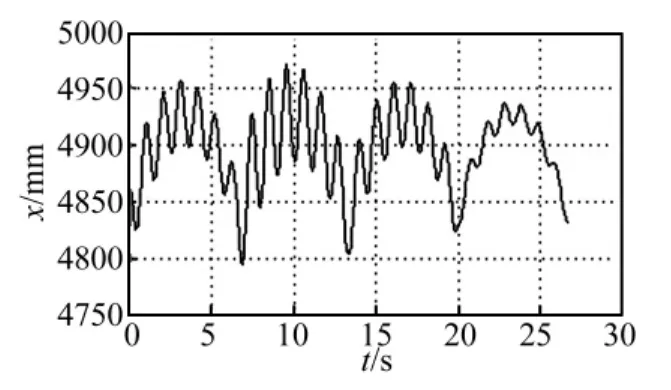
图7 有缓冲工件质心水平变化曲线Fig.7 Workpiece centroid’s transforming curve in buffering condition

图8 有缓冲钳杆φ1变化曲线Fig.8 Transforming curve of buffering clamping bar’s φ1
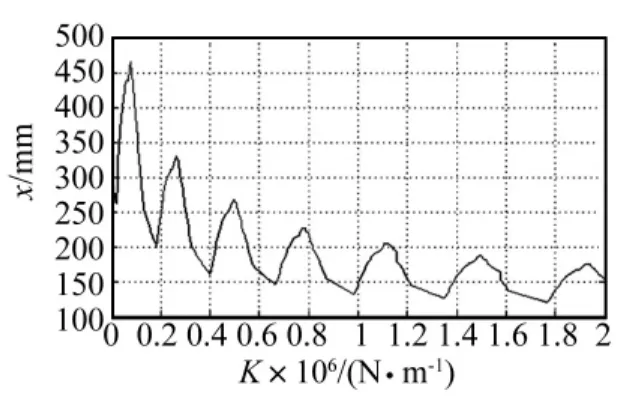
图9 ξ1与K的关系曲线Fig.9 ξ1and K’s relation curve
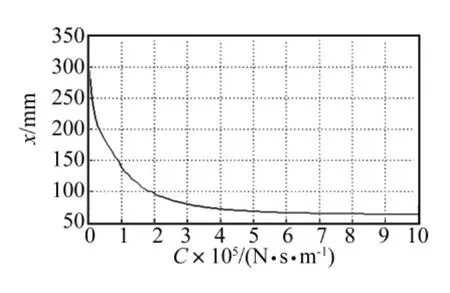
图10 ξ1与C的关系曲线Fig.10 ξ1and C’s relation curve
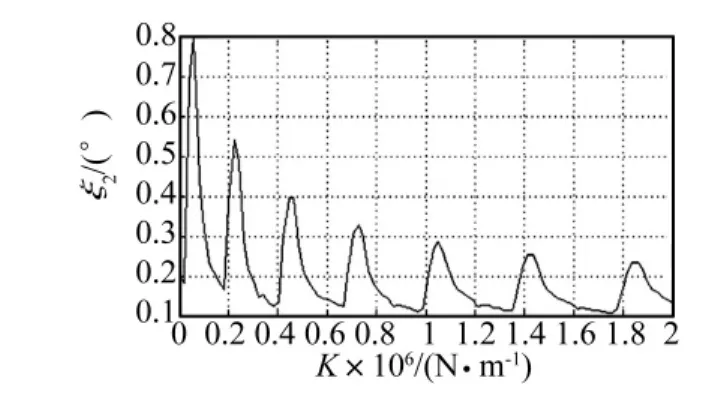
图11 ξ2与K的关系Fig.11 ξ2and K’s relation curve
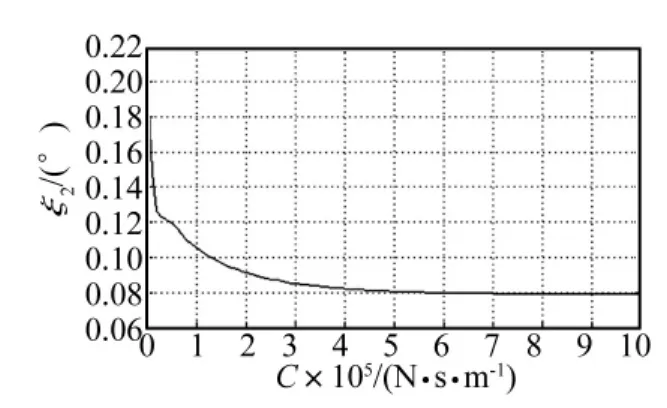
图12 ξ2与C的关系曲线Fig.12 ξ2and C’s relation curve
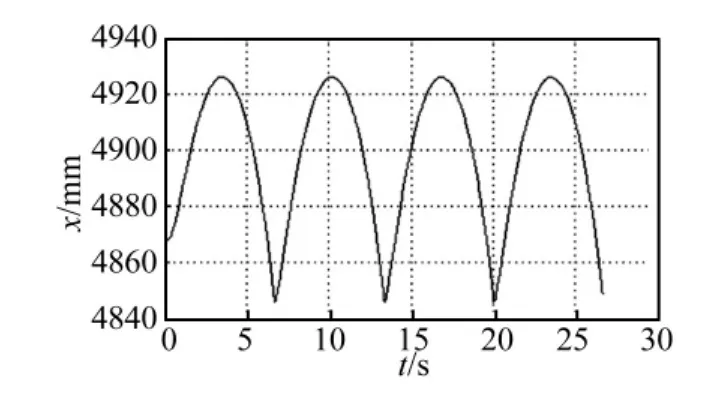
图13 工件质心水平变化曲线Fig.13 Workpiece centroid’s horizontal transforming curve
随缓冲装置刚度及阻尼的增加,工件质心水平位移及钳杆摆角φ1的变化量逐渐降低。其中,工件质心水平位移变化对钳杆工作影响较大,以工件质心最小水平位移确定缓冲装置刚度及阻尼较合理。
由图9看出,阻尼为零时,工件质心水平位移变化范围ξ1随刚度K的增加逐渐降低。当刚度增大到一定程度后,工件质心水平位移变化范围状态相对稳定。充分考虑缓冲装置对吊挂系统杆件作用影响,并满足工件质心水平位移变化相对较小,确定刚度选取范围为0.9×106~1×106N/m 之间;由图10看出,刚度为零时,工件质心水平位移变化范围ξ1随阻尼C的增加而降低,同刚度范围选取。确定阻尼选取范围3×105~4×105N·s/m之间。
由于刚度、阻尼共同发挥作用,因此在刚度确定范围内选m个点,在阻尼确定范围内选n个点,利用循环方式确定刚度及阻尼。当刚度迭代次数m与阻尼迭代次数n足够大时,经运算获得刚度与阻尼为K=0.965×106N/m,C=4×105N·s/m。据确定的刚度与阻尼值,工件质心在水平方向的变化曲线见图13,钳杆摆角φ1变化曲线见图14。吊挂系统摆动明显得到改善,能保证设备的正常使用。
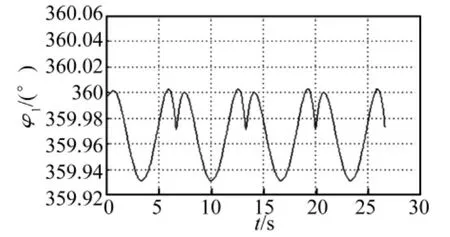
图14 钳杆φ1变化曲线Fig.14 Transforming curve of clamping bar’s φ1
4 结论
(1)针对摆动杠杆式锻造操作机的平升降运动进行系统动能、势能分析,建立吊挂系统动力学模型,为研究操作机缓冲装置提供了条件。
(2)以50 kN操作机为例,在Matlab中求解动力学方程。利用计算结果分析了刚度与阻尼对吊杆摆动、工件质心变化、钳杆摆角变化影响,提出了确定缓冲装置刚度及阻尼思路。
(3)通过求解操作机吊挂系统动力学方程,研究刚度、阻尼对系统运动影响,确定了合理的缓冲装置参数,为锻造操作机提供了设计依据。
[1]傅 新,徐 明,王 伟,等.锻造操作机液压系统设计与仿真[J].机械工程学报,2010,46(11):49-54.
FU Xin,XU Ming,WANG Wei,et al. Hydraulic system design and simulation of the forging manipulator[J].Journal of Mechanical Engineering,2010,46(11):49-54.
[2]蔡 墉.我国自由锻液压机和大型锻件生产的发展历程[J].大型铸锻件,2007(1):37-44.
CAI Yong.The developmental course of our free-forging hydraulic press and the heavy casting and forging production[J].Heavy Casting and Forging,2007(1):37-44.
[3]高 峰,郭为忠,宋清玉,等.重型制造装备国内外研究与发展[J].机械工程学报,2010,46(19):92-107.
GAO Feng,GUO Wei-zhong,SONG Qing-yu,et al.Current development of heavy-duty manufacturing equipments[J].Journal of Mechanical Engineering,2010,46(19):92-107.
[4]赵 勇,林忠钦,王 皓.重型锻造操作机的操作性能分析[J].机械工程学报,2010,46(11):69-75.
ZHAO Yong,LIN Zhong-qin,WANG Hao.Manipulation performance analysis of heavy manipulators[J].Journal of Mechanical Engineering,2010,46(11):69-75.
[5]任云鹏,韩清凯,张天侠,等.基于虚拟样机技术的锻造操作机的动力学仿真[J].东北大学学报,2010,31(8):170-173.
REN Yun-peng,HAN Qing-kai,ZHANG Tian-xia,et al.Dynamic simulation of forging manipulator based on virtual prototyping[J].Journal of Northeastern University,2010,31(8):170-173.
[6]高惠敏.锻造操作机缓冲装置的配置[J].重型机械,2010(S2):249-251.
GAO Hui-min.Introduction to buffering device of forging manipulator[J].Heavy Machinery,2010(S2):249-251.
[7]杨义勇,金德闻.机械系统动力学[M].北京:清华大学出版社,2009.
[8]陈美钰,辛洪兵.平面五杆并联机器人动力学分析[J].北京工商大学学报,2009,27(6):7-11.
CHEN Mei-yu,XIN Hong-bing.Dynamics analysis of planar five-bar parallel robot[J].Journal of Beijing Technology and Business University,2009,27(6):7-11.
[9]白志富,韩先国,陈五一.基于Lagrange方程三自由度并联机构动力学研究[J].北京航空航天大学学报,2005,30(1):51-54.
BAI Zhi-fu HAN Xian-guo CHEN Wu-yi.Study of a 3-DOF parallel manipulator dynamics based on Lagrange’s equation[J].JournalofBeijing University ofAeronauticsand Astronautics,2005,30(1):51-54.
[10]赵 强,吴洪涛,朱剑英.多体系统结构动力学建模[J].南京航空航天大学学报,2006,38(4):443-446.
ZHAO Qiang,WU Hong-tao, ZHU Jian-ying. Structural dynamics modeling of multibody system [J].Journal of Nanjing University ofAeronautics &Astronautics,2006,38(4):443-446.