基于正交试验法的工业机器人定位误差测量
2013-09-07齐立哲余蕾斌
齐立哲 陈 磊 王 伟 余蕾斌 贠 超
1.北京航空航天大学,北京,100083 2.上海飞机制造有限公司,上海,200436
0 引言
工业机器人重复定位精度很高,但绝对定位精度很差。为了提高机器人的性能及拓展工业机器人的应用范围,需要对机器人运动学模型的参数进行标定来降低它的绝对定位误差。机器人标定一般分4个步骤进行:建模、测量、辨识与补偿[1]。机器人工作空间内采样点对应的绝对定位误差的测量是机器人结构参数标定的前提,测量数据的有效性决定了能否正确实现机器人参数的标定。“测量数据样本”选择的有效性很大程度上决定了机器人结构参数标定的效率与精度,一般采集的数据越多越有利于标定过程,但假设机器人6个关节每个关节取5个关节角组合测量,就需要测量15 625次,实际数据采集过程是不可能实现的。因此,测量数据样本空间的研究,对于工业机器人运动学模型参数的正确标定有重要的意义。
关于工业机器人定位误差的测量,已经有很多专家学者进行了研究。Goswami[2]采用球杆仪测量了机器人末端点与工作空间内某一固定点之间的距离。Driels等[3]采用三坐标测量机实现了机器人末端点位姿测量。黄晨华等[4]提出了采用视觉测量机器人三维姿态的方法,并通过仿真验证了基于此建立的以世界坐标系为标定的基准坐标系的机器人标定误差模型。叶声华等[5]采用激光跟踪仪并通过测量机器人1轴和2轴的回转面及基座平面标定机器人基坐标系后,采用各个轴等步长的方式进行末端凸缘盘中心点的误差样本数据采集。韩翔宇等[6]在忽略其他参数的影响后,根据实际测量的关节转角偏差,计算获得了规定的测试体、测试面及测试线上的轨迹误差。郭剑鹰等[7]采用摄像机获得了机器人末端法兰盘在世界坐标系下的位姿。这些研究主要侧重于测量工具、测量过程建模等内容,对于“测量数据的样本”的选择,提到了采用各个关节轴等距采集的测量方法,但这种方法不仅测量数据量大,而且也不能充分反映整个机器人工作空间内的定位误差分布情况。
本文基于6因素5水平的正交试验表,设计了机器人定位误差测量样本空间。同时建立了机器人定位误差测量系统数学模型及基于FARO ARM的实际机器人定位误差测量实验系统,测得了ABB1410型机器人在其样本空间内的定位误差。采用这种方法不仅可以大大减少测试工作量,而且能保证测得的数据充分反映机器人在其工作空间内的定位误差分布情况,为深入开展工业机器人定位误差的补偿研究工作打下基础。
1 基于FARO ARM的工业机器人定位误差测量系统描述
如图1所示,工业机器人定位误差测量系统由FARO ARM、测量靶标及工业机器人组成。图中P为待测量的靶标中心,B为机器人基坐标系,F为机器人法兰盘坐标系,M为FARO ARM坐标系。
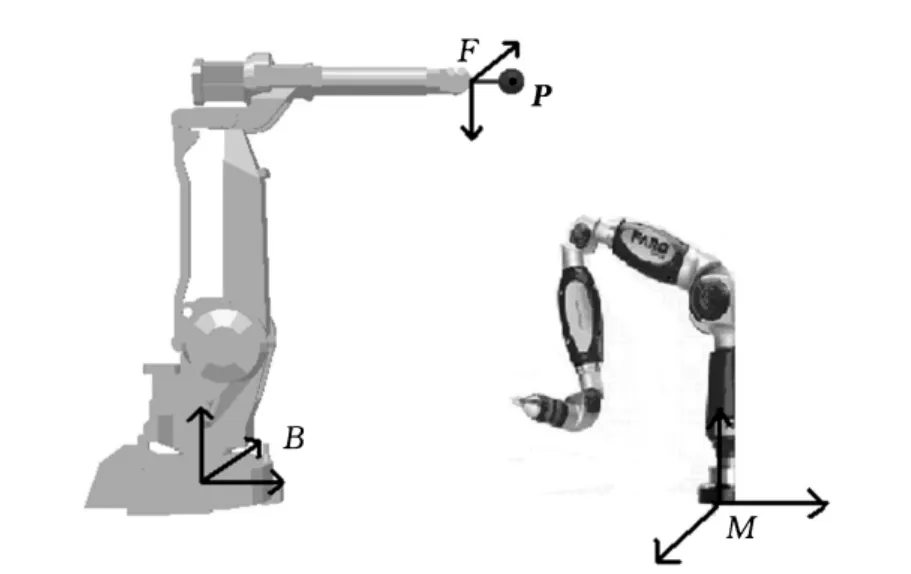
图1 工业机器人定位误差测量系统组成原理图
在图1所示工业机器人定位误差测量系统中,FARO ARM可以直接测量出靶标中心P在M 坐标系下的坐标,同时机器人本身也可以作为测量装置获得被机器人抓着的靶标中心P在机器人B坐标系下的坐标,两者进行坐标变换便可以统一到同一个坐标系下,进而进行比较获得工业机器人在其工作空间内各个测量点的位置误差。工业机器人定位误差测量系统的数学模型可表示为

式中,ΔP为工业机器人测量点P的位置误差;PM为测量点P在M坐标系下的坐标(由测量设备直接读取);BTM为机器人B坐标系与M坐标系之间的转换矩阵(未知量);FTB为工业机器人F坐标系与机器人B坐标系之间的转换矩阵(可通过机器人示教器直接读取);PF为P点在F坐标系下的坐标(未知量)。
采用机器人D-H方法建立的连杆坐标系,在运动学分析时,其相邻连杆间的坐标系转换矩阵可表示为
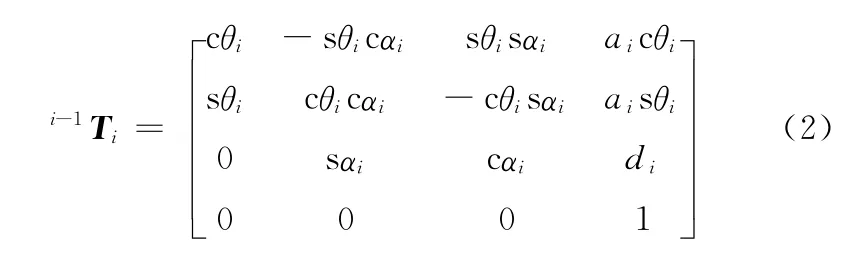
式中,c=cos,s=sin。

由此可知,为了获得工业机器人在其工作空间内各个测量点的定位误差,需要对BTM及PF进行预先标定。相关坐标系标定后,只要改变机器人的各个关节角便可以测量出机器人工作空间内的多组定位误差数据。
2 测量样本空间分析
工业机器人定位误差与机器人所在的工作空间内的位姿有关,为了充分体现机器人的实际定位误差分布情况,理论上讲,采集的数据越多越有利于标定机器人的结构参数。但实际情况是希望采集的数据越少越好,为了解决这一矛盾,可以采用正交试验法的设计原理在试验前对试验过程进行合理安排。在确定测量样本空间的正交试验过程中,可将工业机器人的6个转动关节作为确定机器人空间位姿这一指标的影响因素,考虑到实际情况,每个因素可取5个左右的水平。
采用的正交试验表为Ltu(tq),其中:t为水平数;u为基本列数,为任意正整数;q为正交表总的列数,即纵列总数;tu为正交表总的行数,即试验次数。
在此应用中可采用6因素、5水平及25试验次数的正交表,即L52(56)。
将正交表空间和机器人定位误差测量的样本空间分别记为V和S,则正交表空间有25组样本点,每组包含6个元素,记为:

式中,Vi为正交表空间中的第i个样本点;vij为正交表中第i行第j列对应的值。
同样,机器人定位误差测量的样本空间也包含25组样本点,每组也包含6个元素,记为:

式中,Si为机器人误差测量样本空间的第i个样本点;sij为样本空间中第i个样本点对应的机器人的第j个关节角值。
从V到S的映射可表示为

式中,aSj、bSj分别为机器人第j个关节角的最大值和最小值。
3 试验与定位误差测量
FARO ARM作为标定环节中的测量工具,因其具有操作简单、精度高及适合于工业现场标定应用等优势,越来越受到机器人厂家及研究学者的青睐。因此,在工业机器人定位误差测量系统中的测量设备选择了FARO ARM来进行标定研究。
建立的工业机器人定位误差测量系统如图2所示,它包含了被标定工业机器人、FARO ARM及测量靶标。工业机器人采用ABB IRB 1410机器人,该机器人是一种机身紧凑的机器人,最高承受载荷可达49N,具有较高的重复定位精度,对其绝对定位误差进行标定后,可以大大拓展其应用领域;误差测量设备采用USB型FARO ARM,该测量设备具有测量精度高、操作简单等优点,可以直接测得机器人手臂上靶标在其坐标系下的坐标。

图2 工业机器人定位误差测量系统
3.1 数据的采集
为了标定机器人定位误差,需要根据前面确定的采集数据的样本空间进行数据采集。考虑到测量范围的有限性,实际测量样本空间采用两次正交表获得,先将机器人整个工作空间划分成25个样本子空间,然后在每个子空间内设计25个测量点。ABB IRB1410机器人的子空间划分的测量因素及其各水平值见表1,并选取第16个子空间进行采样。实际测量过程、所有子空间中心点分布及第16个子空间内测量点分布情况分别如图3、图4、图5所示。
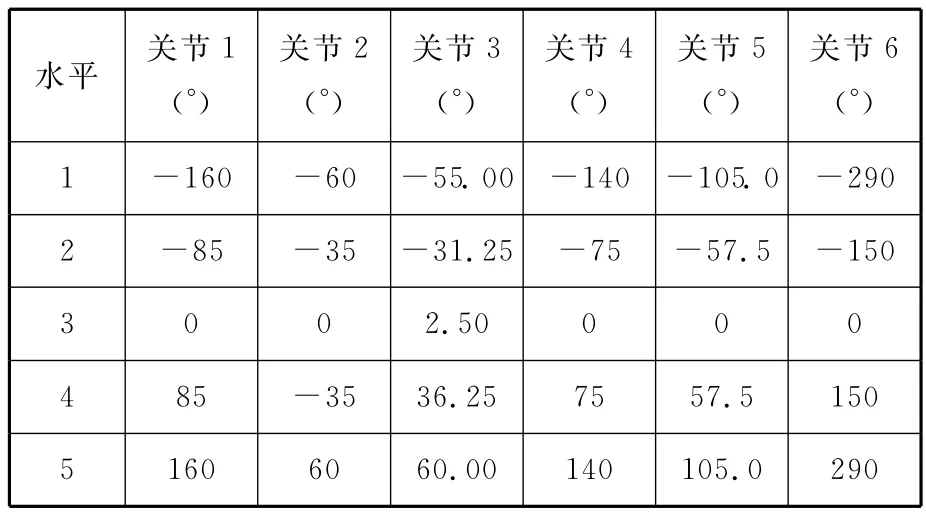
表2 测量因素水平

图3 测量过程
3.2 机器人定位误差测量
系统中的坐标系标定完后,根据工业机器人的定位误差进行系统的测量过程数学模型测量,便可以获得测量点的定位误差。图6所示为机器人第16个样本子空间内25个测量点的定位误差图,从图上可以看出:测量范围内的最大定位误差达到了近1.5mm。需要说明的是,这些误差也包含了因机器人误差带来的标定误差而引起的定位误差,但都与连杆参数误差有关。

图4 样本子空间中心点分布图
图5 第16个样本子空间内测量点分布图
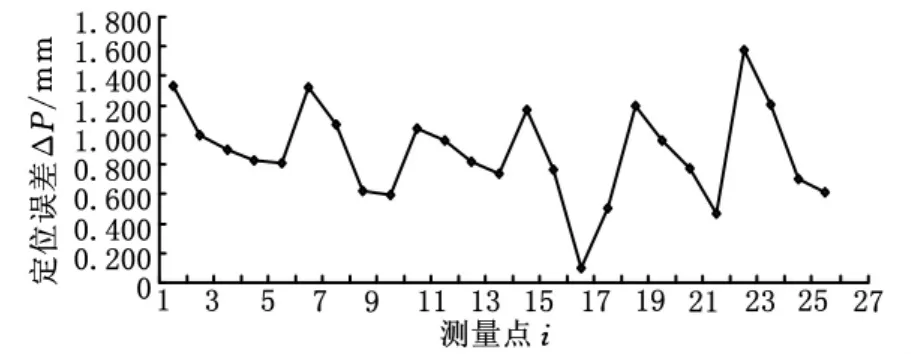
图6 第16个测量样本子空间内各个测量点的定位误差
4 结束语
本文采用FARO ARM作为机器人定位误差测量系统中的测量工具,建立了机器人定位误差测量系统数学模型;提出了测量系统中样本数据的采样方法;建立了实际机器人定位误差测量系统,测得了ABB1410型机器人在部分样本空间内的定位误差,为工业机器人定位误差的补偿打下了基础,后续需要进一步研究机器人定位误差补偿的有效方法。
[1]Roth Z S,Mooring B W,Bahram R.An Overview of Robot Calibration[J].IEEE Journal of Robotics and Automation,1987,3(5):377-385.
[2]Goswami A.Identifying Robot Parameters Using Partial Pose Information[C]//IEEE International Conference on Systems,Man and Cybernetics.Chicago,1992:18-21.
[3]Driels M R,Swayze L W.Full—pose Calibration of a Robot Manipulator Using a Coordinate Measuring Machine[J].International Journal of Advanced Manufacturing Technology,1993,8:34-41.
[4]黄晨华,张铁,谢存禧.工业机器人位姿误差建模与仿真[J].华南理工大学学报:自然科学版,2009,37(8):66-70.Huang Chenhua,Zhang Tie,Xie Cunxi.Modeling and Simulation of Pose Error of Industrial Robot[J].Journal of South China University of Technology:Natural Science Edition,2009,37(8):66-70.
[5]叶声华,王一,任永杰,等.基于激光跟踪仪的机器人运动学参数标定方法[J].天津大学学报,2007,40(2):202-205.Ye Shenghua,Wang Yi,Ren Yongjie,et al.Calibration of Robot Kinematic Parameters Based on Laser Tracker[J].Journal of Tianjin University,2007,40(2):202-205.
[6]韩翔宇,都东,陈强,等.基于运动学分析的工业机器人轨迹精度测量的研究[J].机器人,2002,24(1):1-5.Han Xiangyu,Du Dong,Chen Qiang,et al.Study of Measurement of Trajectory Precision for Industrial Robot Based on Kinematics Analysis[J].Robot,2002,24(1):1-5.
[7]郭剑鹰,吕恬生.基于主动视觉的机器人末端姿态测量[J].上海交通大学学报,2003,37(5):715-719.Guo Jianying,LüTiansheng.Robot End-effector Pose Measurement with Active Vision[J].Journal of Shanghai Jiaotong University,2003,37(5):715-719.