立式金属罐足式爬壁机器人的设计
2013-08-20方杰佟仕忠付贵增
方杰,佟仕忠,付贵增
(辽宁石油化工大学 辽宁 抚顺 113001)
近20年来,随着国内和国外对爬壁机器人的需求不断增加,爬壁机器人的研究得到很大的发展。爬壁机器人一般必须具备两个基本功能:吸附功能和移动功能[1]。针对立式金属罐爬壁机器人[2],吸附方式主要采用磁力吸附,移动方式主要采用轮式或者履带式。当金属罐的表面有缝隙或者凹陷时,采用轮式或者履带式爬壁机器人的磁力座的磁力随壁面和磁铁之间的间距的增大而呈急剧减小,导致爬壁机器人的倾覆,这样爬壁机器人的安全性就得不到保障。
为了实现立式金属罐表面的检测作业,研究设计了一种足式爬壁机器人。其越障能力能达到20 mm,运动时负重能力能够达到150 N,静止时负载能力达到1 000 N。
1 机器人的机械结构设计
1.1 机器人的总体结构
本爬壁机器人使用600 mm*300 mm的铝板作为承载平台,以4只仿生足作为支撑和主要运动支架。爬壁机器人的总体结构如图1所示。仿生足位于立方体侧下端,平均分布于铝板的4个方向,前后两个仿生足固定在机械平台上,中间两个仿生足衔接在滑块上,通过传送带的运动带动中间两个仿生足的移动。仿生足分为两部分:上半部分主要是一个推杆电机,能够控制仿生足的伸缩;下半部分主要是吸附部分;中间两个仿生足通过两个齿轮衔接在滑块上,通过电机控制齿轮的旋转,从而控制爬壁机器人的运动方向。衔接部分有180°的自由度,爬壁机器人可以向任意方向运动。
1.2 磁力座
磁力座的结构如图2所示,其采用的是第三代[3]稀土永磁钕铁硼。铁钕硼磁性能极高,能吸起相当于自身重量640倍的重物。钕铁硼磁铁的机械性能比钐钴磁铁和铝镍钴磁铁都好,更易于切割和钻孔及复杂形状加工。
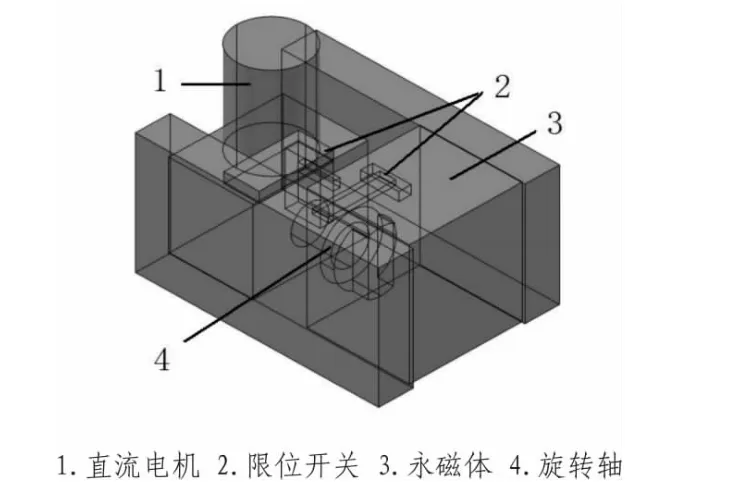
图2 磁力座的机械结构简图Fig.2 Mechanical structure diagram of magnetic block
本永磁体的磁力是可控的,当嵌入永磁体的旋转轴的角度为0°(设定嵌入部分旋转轴竖直方向为0°,水平方向为90°)时,永磁体的吸附力为0,当角度为90°时,永磁体的吸附力处于最大值。在0°和90°方向设置两个限位开关,通过旋转轴的转动控制永磁体的吸附与断开。
1.3 运动规划
爬壁机器人的运动示意图如图3所示。机器人在爬行过程中至少两个仿生足吸附在金属罐壁面上,才能保证机器人吸附在金属罐壁面上而不颠覆。

图3 爬壁机器人的运动示意图Fig.3 Movement diagram of wall-climbing robot
图3(A)-(F)展示爬壁机器人向上运动全过程。 图 3(A)表示机器人处于初始状态推杆电机的推杆达到最大行程。四足全部处于吸附状态。图3(B)-(C)表示中间两个永磁体不吸附,收缩仿生足并通过传送带带动仿生足前进。图3(D)-(E)中间仿生足伸长并吸附,前后两仿生足不吸附并收缩。图3(F)中间支撑点固定,平台前进,前后仿生足伸长并吸附,爬壁机器人回到初始状态。
图3(a)-(f)展示爬壁机器人旋转运动过程。图 3(b)-(c)中间仿生足不吸附,收缩中间仿生足,然后旋转中间仿生足。图3(d)中级仿生足伸长吸附,前后仿生足不吸附并收缩。图3(e)-(f)中间支撑点固定,平台旋转,然后前后仿生足伸长并吸附。
2 爬壁机器人的控制结构设计
2.1 总体方案设计
爬壁机器人控制系统主要由单片机,红外遥控模块,电源模块,驱动模块组成。红外遥控模块主要负责遥控爬壁机器人的运动;摄像头模块负责金属罐壁面信息的采集;各模块之间的关系如4所示。
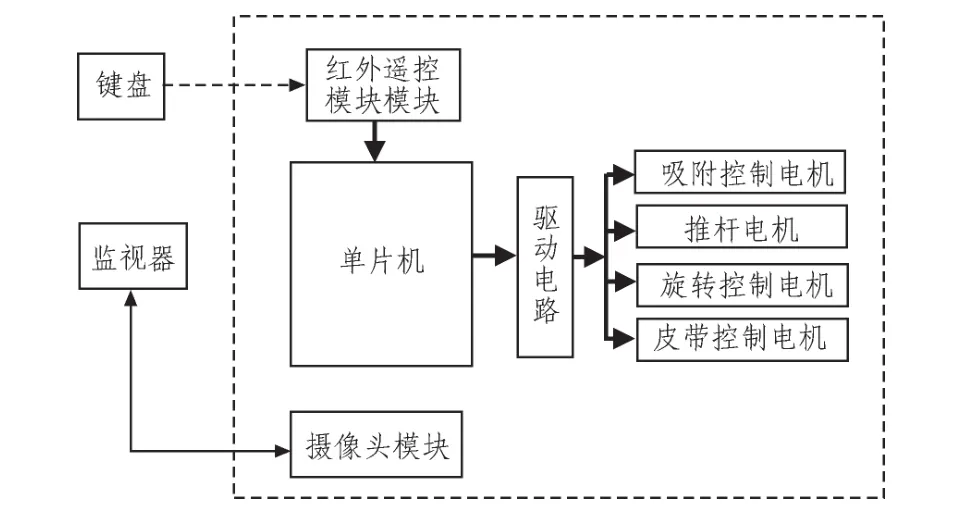
图4 系统总体结构Fig.4 System architecture
2.2 遥控模块
红外遥控模块主要完成对爬壁机器人的运动进行实时控制,由发送和接收两个组成部分。发送端采用单片机将待发送的二进制信号编码调制为一系列的脉冲序列[4],通过红外发射管发射红外信号。红外接收完成对红外信号的接收、放大、检波、整形,并解调出遥控编码脉冲。红外接收头接收红外信号[5],它同时对信号进行放大、检波、整形得到TTL电平的编码信号,再送给单片机,经单片机解码并执行去控制相关对象。如图5所示。

图5 红外通信原理图Fig.5 Schematic of the infrared communication
红外发射二极管采用IR204C-A,红外接收二极管采用PT204-6B。SAA3010是飞利浦公司设计的通用红外遥控系统的红外发射器电路[6]。SAA3010使用单级开关键盘,可产生2048条不同指令。SAA3010红外遥控发射集成电路具有低电源电压工作、双相传送技术、串联谐振和误码率低等特点。BC7210是一款低成本通用红外遥控解码芯片,可以完成目前应用最广泛的多种红外遥控编码的解码,其可选择并行或者串行解码输出,兼容SPI及UART的串行输出,采用数字滤波技术,高抗干扰,无误码。
2.3 摄像头模块
摄像头模块主要通过现场摄像头来实现。现场的摄像头进行视频采集后的信息,经过传输和处理后在监视器上进行显示,从而达到实时监控的目的。
3 系统软件设计
整个控制系统通过红外遥控器接收来自控制系统的指令,根据该指令控制爬壁机器人各种电机的协调运转,从而保证爬壁机器人能够按照预期的设想在金属罐壁面上实现前进、后退和转向。系统中,首先初始化保证爬壁机器人4只仿生足都能吸附在金属罐壁面上,然后根据发送的控制指令,来执行前进、后退、旋转、停止等动作。当爬壁机器人到达预定的区域时,启动摄像头工作,开始拍照,采集金属罐壁面图像。当接收到停止指令时,爬壁机器人暂停运转,等待接收下一个指令。当任务完成时,机器人结束任务。系统控制流程图如图6所示。
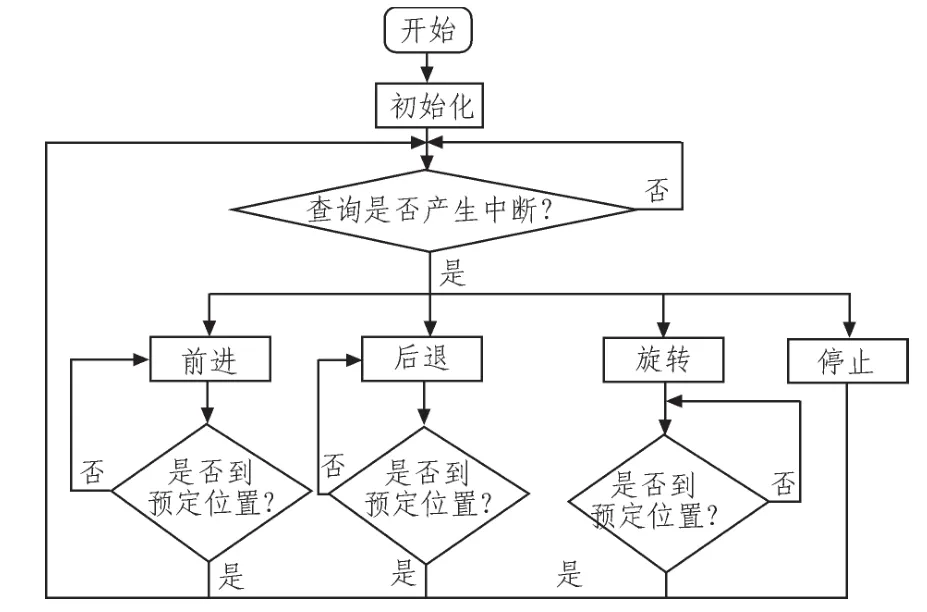
图6 系统控制流程图Fig.6 System control flowchart
4 结 论
文中介绍了一种足式爬壁机器人的机械结构和运动过程。通过一体化的设计,不仅降低了机器人的体积和重量,还提高了其驱动效率。实践表明:立式金属罐足式爬壁机器人具有结构简单、可靠性高、功耗低、越障能力强、负载能力强等优点。
[1]WANG Zhi-heng,BAO Guan-jun,ZHANG Li-bin.Development and control of flexible pneumatic wall-climbing robot[J].Cent.South Univ.Technol.,2009(16):961-970.
[2]刘爱华,王洪光,房立金.一种轮足复合式爬壁机器人机构建模与分析[J].机器人,2008(6):486-490.
LIU Ai-hua,WANG Hong-guang,FANG Li-jin.Modeling and analysis of a wheeled and myriapod wall-climbing robot[J].Robot,2008(6):486-490.
[3]胡文艳.钕铁硼永磁材料的性能及研究进展[J].现代电子技术,2012,35(2):151-153.
HU Wen-yan.Property and research progress of NbFeB permanent magnets[J].Modern Electronics Technique,2012,35(2):151-153.
[4]求是科技.单片机典型模块设计实例导航[M].北京:人民邮电出版社,2004.
[5]王成义,郭秀梅,丛晓燕.一种可靠地红外通信协议设计与实现[J].激光与红外,2009,39(10):1070-1073.
WANG Cheng-yi,GUO Xiu-mei,CONG Xiao-yan.A reliable design and implement of infrared communication protocol[J].Laser&Infrared,2009,39(10):1070-1073.
[6]张玉香.彩电红外遥控发射电路[J].器件与元件,1999:42.
ZHANG Yu-xiang.TV infrared remote control transmitter circuit[J].Devices and Components,1999:42.
