车载毫米波高分辨实时SAR系统对江中船只识别的方法
2013-08-20崔开博赵宏宇袁乃昌
崔开博,赵宏宇,陈 曦,朱 红,袁乃昌
(国防科学技术大学 电子科学与工程学院,湖南 长沙 410073)
近年来,江河上行驶的船只种类越来越多,如采沙船、渔船、客运船等等,很多船只不按照规定的时间段和航线行驶,很容易造成不必要的事故发生,这给有关部门的监管造成了极大地不便。一些采集资源的船只,如采沙船、渔船等,为了谋取暴利,违反规定进行作业,严重的破坏了环境。由于这些不法行为大多在夜间进行,给执法部门进行监管和处理工作造成很大的困难。本文提出了一种采用车载毫米波高分辨SAR技术进行河流采沙船只监控的方法,首先简单的介绍了毫米波合成孔径雷达的概况、实时成像系统的算法过程,目标识别算法过程、ISAR成像跟踪以及整个SAR系统的工作流程,然后对实测河流进行了实验,验证了该毫米波SAR系统可以全天候实时的对河流进行高分辨成像,识别出船只种类,进行实时跟踪,从而可以方便的进行管理。
1 毫米波SAR系统介绍
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种主动式电磁波成像传感器,可全天候全天时获得高分辨率雷达图像,在机载和星载平台上已经得到了广泛的应用[1]。毫米波SAR近年来成为了研究的重点、热点,并已应用于许多重要的民用和军用系统中,如近程高分辨力防空系统、导弹制导系统、目标测量系统等。毫米波频谱介于微波和红外波段之间,因此兼有微波和红外波段的优点:与微波相比,毫米波系统的绝对频带较宽,天线波束窄,旁瓣低,抗干扰性能强;与红外相比,毫米波通过烟、雾、灰、尘的能力强,具有较好的全天候能力;并且毫米波系统体积小,质量轻、易于高度集成化,可以采用车载平台。近年来SAR信号处理技术的进步、微电子技术的发展、大规模集成电路的开发以及并行处理器的产生已经使得实时成像不再受到诸多因素的制约。
作为一种高分辨率毫米波成像雷达,毫米波SAR通过发射高稳定度的相干脉冲,综合运用合成孔径技术、脉冲压缩技术等信号处理方法来获得高分辨率。距离向通过发射大的时宽带宽积信号,进行脉冲压缩来实现高分辨率;方位向则利用雷达和目标之间的相对运动—多普勒效应,通过匹配滤波或频率分析的方法进行脉冲压缩,实现高分辨率。SAR成像技术发展到如今已经有适应于不同平台、不同成像场景、不同应用领域的多种算法,如RD算法、算法、CS算法、FS算法等等。RD算法是通过距离向和方位向分别使用匹配函数进行脉冲压缩来获得时域图像的一种经典算法,针对不同的成像条件和距离徙动量影响的不同,其存在多种改进形式。进行河面检测的毫米波SAR,一般工作在正侧视或者小斜视,这种情况下,采用校正距离徙动的改进RD算法:将距离脉压后的信号乘以一个线性相位项来校正距离徙动,然后进行方位匹配滤波。为满足实时处理的要求[4],在距离脉压多普勒参数估计和徙动校正时将数据按方位向分块进行处理,再将校正后数据进行距离向分块,同时方位向整合进行整体的匹配滤波、多视处理,最后将距离向数据整合得出一副完整的高分辨SAR图像[2],算法框图如图1所示。成像处理模块采用FPGA+多块DSP的方法,距离和方位的分块处理有利于实时成像的实现,优化处理速度。
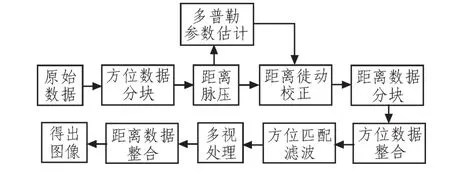
图1 成像算法框图Fig.1 Imaging algorithm block diagram
在得到高分辨率的SAR图像以后,对图像进行一定的处理,从而识别出河流湖泊中的船只目标[3]。船只一般情况下会在河湖中行驶或者停靠在岸边,在河流中行驶的船只通过河岸分离便能够从陆地中分割开,但停靠在岸边的船只会由于与陆地距离太近而无法直接分割,本系统中采用角点判断方法,提取可能为驻泊船只的陆地部分,然后利用驻泊船只判断准则切割二值图像,得出河岸分离的结果,从而提取出陆地模板,进行CFAR求解。然后对CFAR结果进行聚类,合并一定区域的二值图像,去除大于船只面积的岛屿等信息。一般来说CFAR会将所有船只全部提取出来,但会存在虚警,本系统中采用提取特征特性的方法,根据船只的长度、宽度、长宽比、直径、面积、周长、形状复杂度、归一化转动惯量、主轴转动惯量、方差系数、加权填充比、分形维数、间隙度等特性去除虚警目标,提取出正确的目标[5-6,8]。系统中带有GPS+INS组合的导航器件,提取出目标后,根据其在SAR图像中的位置信息便可以得出它的地理信息,如:位置,与雷达的相对距离,方位角度等等,方便下一步进行跟踪。目标识别算法框图如图2所示。

图2 目标识别算法框图Fig.2 Target recognition algorithm block diagram
提取出船只目标和其地理信息后,便对目标进行ISAR成像,实现实时跟踪。同SAR一样,ISAR也是依靠雷达与目标之间的相对运动进行成像的,但ISAR一般是雷达不动,目标移动。本系统中,通过ISAR成像可以观测船只在河流中的是否在运动、运动的方向等各项参数,并且实时的更新船只的地理信息。ISAR也采用RD算法,与SAR成像做相同的处理,来满足实时性的要求。
通过高分辨SAR成像、目标提取、ISAR成像跟踪,便可以识别出船只种类,并确定其运动状态以及地理信息,从而实现对船只的管理。整个毫米波高分辨SAR系统的工作过程框图如图3所示。
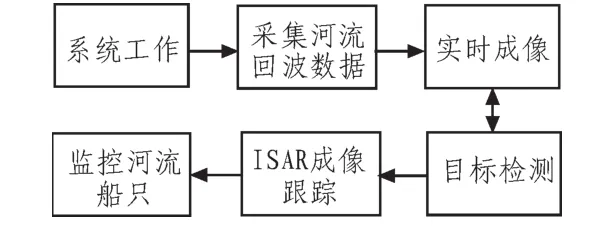
图3 系统工作流程图Fig.3 System block diagram
2 实测结果
使用该车载毫米波高分辨SAR系统在湘江的三叉矶大桥上对湘江进行实测实验,识别、跟踪江上的船只。
在桥上以60 km/h的速度进行车载实时成像,成像结果如图4所示。图(a)为实时的SAR图像,图(b)为从googlemap上下载的光学图像,两者对比可以发现该实时的SAR图像具有较高的分辨率,完全呈现了该地区的特征。
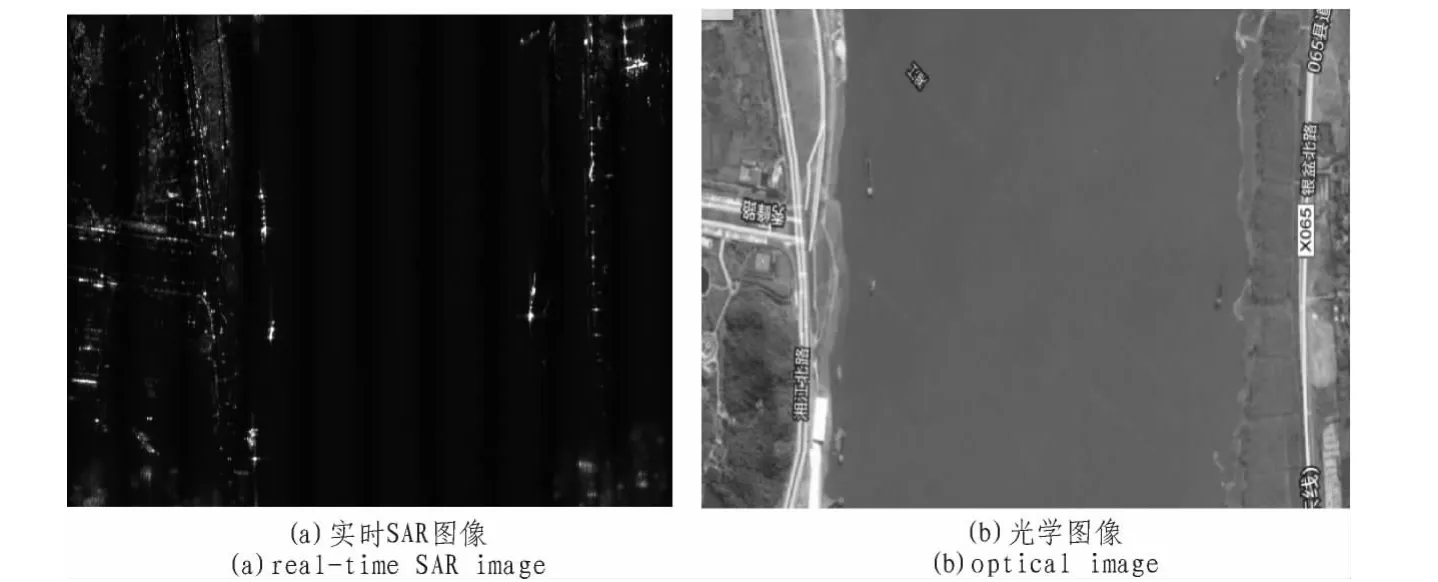
图4 实时SAR图像和光学图像对比图Fig.4 Contrast diagram from real-time SAR image to optical image
得到高分辨的SAR图像后,对图像进行实时的处理,根据目标特性提取出江面上船只,算法如图3所示。图5-(a)列出了船只的部分特征参数提取结果,图5-(b)为船只目标的识别结果,图5-(c)为提取出的单个船只的SAR图像,其中白框圈出的是船上的传送带,初步识别为江中的采沙船只,传送带为运输沙子的工具。图(d)为提取出船只所对应的光学图像。从目标特性参数中可以看出,提出的该船只长度为80米,其中传送带的长度为20米,宽度为6米,和实际的采沙船只数据相吻合,提取识别结果正确。所以该系统实时的完成了目标的识别工作,将河流中的船只正确的提取并识别出来。
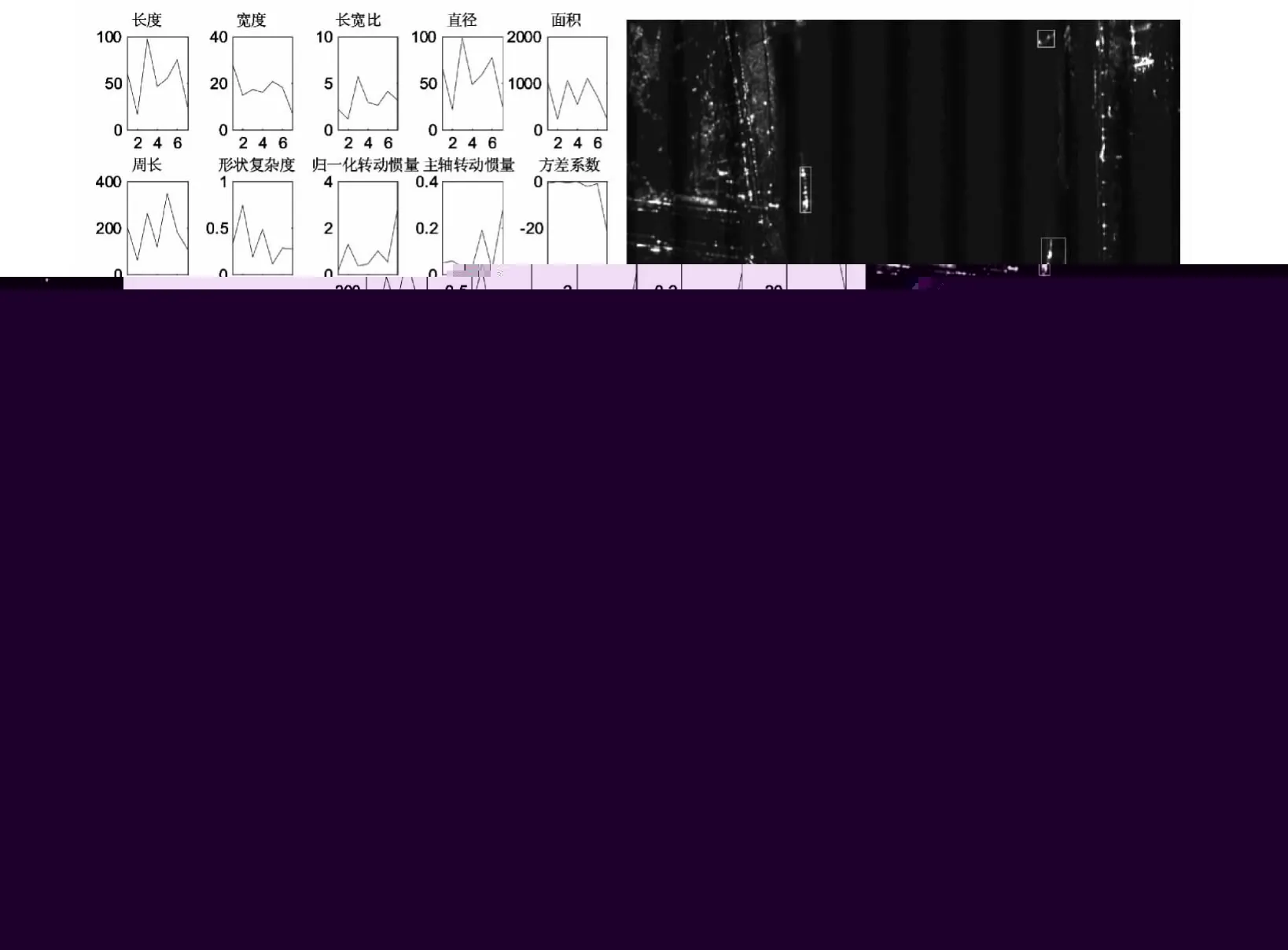
图5 目标识别结果图Fig.5 Diagram of results of target recognition
对识别出的船只计算出其位置信息,从而进行ISAR成像跟踪[7],ISAR成像结果如图6所示,图(a)为江面中一采沙船的光学图像,图(b)到图(f)为采沙船远离雷达时实时的ISRA成像结果。从图中可以看出该系统能够实时的对采沙船只进行跟踪,并实现清晰地ISAR成像,确定其位置、运动方向、运动速度等信息。这样,便实现了采用该车载毫米波高分辨SAR系统对河流船只进行实时的监控、管理。
3 结束语
本文针对江面上船只不按规定行驶和资源采集船只违法作业的现状提出了一种采用车载毫米波高分辨SAR系统实现对船只进行实时监控、管理的方法,通过对该系统的实时SAR成像、目标识别分割、实时ISAR成像跟踪模块的研究,论证了系统的可实时性和可实现性,并通过对实际河流中的船只进行成像、检测、跟踪实验完成了预计功能,证明该系统能够对河流中船只进行实时监管,从而在河湖资源管理和环境保护中具有较为广阔的应用前景。
[1]Ian G,Cumming,FrankH.Wong.Digital Processing of Synthetic Aperture Radar Data:Algorithms and Implementation[M].BeiJing:Publishing House of Electronics Industry,2007.
[2]保铮,刑孟道,王彤.雷达成像技术[M].北京:电子工业出版社,2005.
[3]朱兵,李金宗,陈爱军.大尺度遥感图像中目标快速识别[J].模式识别与人工智能,2006,19(4):552-556.
ZHU Bing,LI Jin-zong,CHEN Ai-jun.Fast recognition of harbor target in large scale remote sensor images[J].PR&AI,2006,19(4):552-556.
[4]贺知明,朱江,周波.弹载SAR实时信号处理研究[J].电子与信息学报,2008,30(4):1011-1013.
HE Zhi-ming,ZHU Jiang,ZHOU Bo.Research on real-time signal processing of the missile-borne SAR [J].Journal of Electronics&InformationTechnology,2008,30(4):1011-1013.
[5]W.G.Carrra, R.S.Goodman and R.M.Majoswski,Spotlight Synthetie Aperture Radar:signal processing algorithms,Norwood,MA, Artech House,1995.
[6]李艳,彭嘉雄.港口目标特征提取与识别[J].华中科技大学学报:自然科学版,2001,29(6):10-12.
LI Yan,Peng Jia-xiong.Feature Extraction of the Harbor Target and Its Recognition.Journal of Huazhong University of Science and Technology:Natural Science,2001,29(6):10-12.
[7]Bao Z,Sun C Y,Xing M D.Time-Frequency approaches to ISAR imaging of maneuvering targets and their limitatuons[J].IEEETrans.on Aerospace and Electronic Systems,2001,37(3):1091-1099.
[8]Otsu N.A Threshold Selection Method from Grey-Level Histo-grams[J].IEEE Trans on Systems,M an,and Cybernetics,1978,9(1):62-66.

图6 采沙船实时ISAR图像Fig.6 The real-time ISAR image of mining large junk