新型拟人机械腿的参数优化
2013-07-25李研彪李景敏计时鸣赵章风
李研彪 刘 毅 李景敏 计时鸣 赵章风
浙江工业大学特种装备制造与先进加工技术教育部重点实验室,杭州,310032
0 引言
拟人机器腿是拟人机器人的主要支撑部分,起保持拟人机器人身体平衡的作用[1-2]。目前,多数拟人机械腿采用串联结构,存在承载能力小、运动惯性大等问题[3-5],如日本早稻田大学研制的WL系列双足拟人机器人,该拟人机器人的双腿均采用串联机构,各腿具有5个自由度。另外,日本本田公司、美国Sarcos研究公司、德国Karlsruhe大学和北京航空航天大学等也相继研制出多种串联结构的仿生机械腿。相对串联机构,并联机构具有结构紧凑、承载能力大等优点。
合理的结构参数一直是机械设计的基础,直接影响机械运动性能的优劣[6-8]。目前,很多学者在结构参数优化方面已经做了大量的研究。刘辛军[9]研究了结构参数与各性能指标之间的分布规律,刘冰等[10]应用遗传算法优化了微动机器人的结构参数,Hao等[11]提出了一种工作空间优化方法。上述设计方法均存在一些不足,如存在受主观性影响以及数学应用条件的限制等。
根据人体腿部结构特点,笔者提出了一种新型并联拟人机械腿[12]及其概率参数设计方法,其机构原型采用一种4-DOF欠驱动并联机构。本文对该拟人机械腿进行了运动学性能研究,定义了运动传递性能评价指标和力传递性能评价指标及各全域性能评价指标,绘制了各全域性能图谱,应用概率参数设计方法优化了拟人机械腿的各结构参数,给出了一种拟人机械腿的设计方案。相对于以往串联机械臂,这种机械臂的电机均置于固定件上,减小了可动构件的质量,且由三个电机共同承载末端件的承载重量。
1 新型拟人机械腿的结构布局特点
笔者提出的拟人机械腿通过三个电机驱动,实现膝关节和踝关节的运动,类似于人体膝关节和踝关节的结构特点,其驱动装置安放在固定件的位置上。该机构的运动杆件不必承载驱动电机的重量,减少了电机数量,这种拟人机械腿具有结构简单、承载能力强、运动惯性小、运动灵活等优点,克服了传动系统复杂、动态特性差等缺点。
这种拟人机械腿的结构布局特点如下:①三个直线移动副P1、P2和P3相互平行;② 三个直线移动副P1、P2和P3均安装在基座上;③ 当杆FO2垂直于面MNO2、平行于杆FO1,且各移动副输入均为零时,这种膝关节和踝关节机构处于初始位姿。移动副P1、P2和P3的初始长度分别为Li0(i=1,2,3),Δli分别为各直线移动副的输入位移。建立两个坐标系:静坐标系R(O1X1Y1Z1)、动坐标系S(O2X2Y2Z2),如图1所示,点O2为这种机构的参考点。
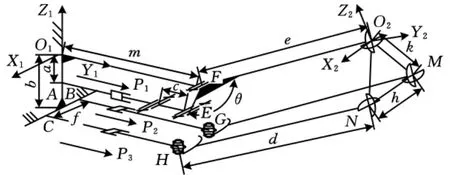
图1 拟人机械腿机构简图
2 位置分析
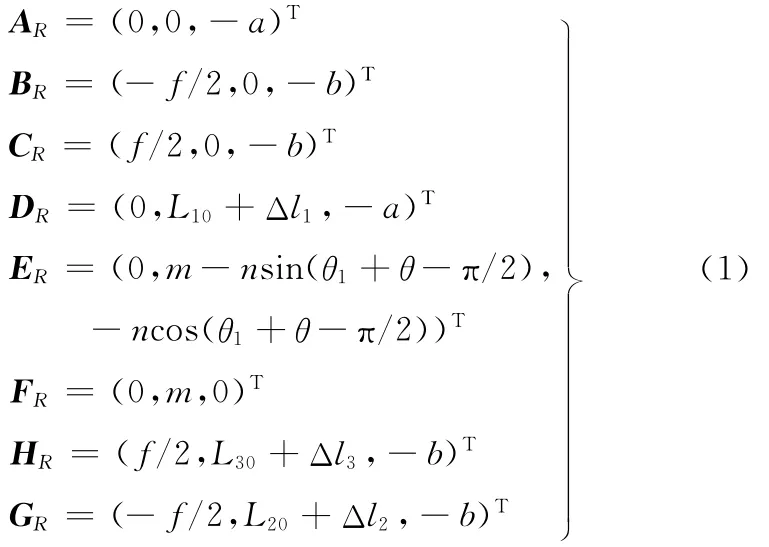
位置分析是机械运动分析和应用的基础[13]。设(0,y,z)T为参考点O2的位置坐标,(α,0,γ)T为参考点O2的姿态坐标,如图1所示。由这种机构的布局特点知,A、B、C、D、E、F、H和G在坐标系R中的位置矢量为
其中,n为杆EF的长度,θ1为杆FO2绕F点的转角,逆时针为正,顺时针为负,则

M和N在坐标系S中的位置矢量为

则M和N在坐标系R中的位置矢量为

式中,O2R为参考点O2在静坐标系中的位置矢量;T为转换矩阵。
由这种膝关节和踝关节机构的结构几何关系可得
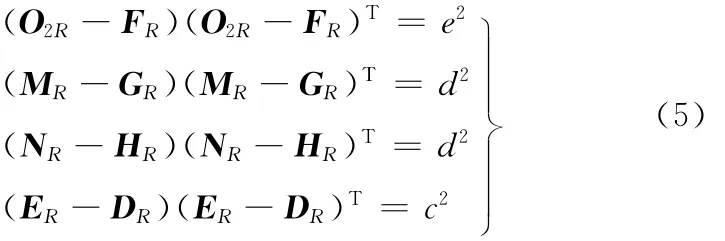
由式(1)~式(5)可得这种机构的位置反解:
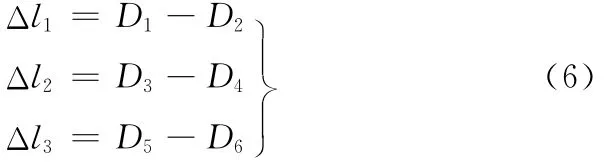
其中,D1=m-nsin(θ-θ1-π/2)-L10;D1、D2、D3、D4、D5、D6分别是关于机械腿各结构参数的函数。式(6)为该拟人机械腿机构的膝关节和踝关节机构的位置反解表达式,也是其唯一反解。
3 结构约束分析
设σ1、σ2、λ1、λ2、ζ1和ζ2分 别 为 沿 定 长 杆O1F、BG、CH、FO2、GM和HN方向的单位矢量,η1、η2和η3分别为定长杆O1F与杆FO2、定长杆BG与杆GM、定长杆CH与杆HN之间的夹角,则
其中,σ1= (FR-O1R)/m,σ2= (GR-BR)/|GR-BR|,λ1= (HR-CR)/|HR-CR|,λ2= (O2R-FR)/e,ξ1= (MR-GR)/d,ξ2= (NR-HR)/d。假设ηi(i=1,2,3)的最小转角和最大转角分别为ηimin和ηimax,则这种机构的转角约束为

设三个直线移动副P1、P2和P3输入位移的最大值和最小值分别为Limax和Limin(i=1,2,3),则直线移动副的长度约束为

4 运动学性能研究
设V=(VY,VZ,ωZ,ωX)T为参考点O2在静坐标系R中的广义速度矢量,输入速度矢量为v=(v1,v2,v3)T,vi为Pi(i=1,2,3)的输入速度。由这种膝关节和踝关节机构结构特点,可得

其中,φ1为杆DE绕D点的转角。式(10)对时间求导并整理,可得FO2绕F点的转动角速度为

其中,逆时针为ω1正方向,顺时针为ω1负方向。则参考点O2的线速度矢量为

其中,n1为垂直于杆FO2方向的单位矢量,V′仅受角速度ω1的影响。
由式(10)~ 式(12),可得

由这种膝关节和踝关节机构的结构特点,设M和N点相对于静坐标系的速度矢量分别为VM和VN,则有
式中,VO2为参考点O2在静坐标系下的线速度矢量;ω为参考点O2在静坐标系下的角速度矢量。
设ei为移动副Pi(i=1,2,3)的单位方向矢量,n2和n3分别为定长杆GM和HN的单位方向矢量,当这种机构不在奇异位姿时,M和N点分别沿杆GM和HN的速度矢量为

又

综合式(10)~ 式(18),可得
由式(19)可得
考虑线速度矢量V′仅受角速度ω1的影响,为了便于性能分析,本文推导这种机构的速度雅可比矩阵J,由式(11)和式(21)可得
这种机构不在奇异位形时,考虑线速度和角速度为不同的量纲,式(22)可改写为

其中,JV、Jω分别为这种膝关节和踝关节机构的线速度和角速度雅可比矩阵。式(25)反映了输入速度和输出速度之间的关系。
5 运动学性能评价指标的定义
当机构不在奇异位形时,雅可比矩阵Jω有奇异值分解,则存在正交阵Aω∈R2×2、Bω∈R3×3使
式中,σ1ω、σ2ω分别为Jω的两个奇异值,且σ1ω≥σ2ω。
当这种机构不在奇异位形时,设输入向量为单位向量,即

综合式(23)~ 式(27),可得以下方程:

由式(28)可知,当输入速度为单位向量时,输出角速度分布在一个椭圆上[14],其轴长分别为σ1ω和σ2ω,为了评价这种机械臂的速度传递性能,本文定义线速度传递性能评价指标KV和角速度传递性能评价指标Kη:

在拟人机械腿机构的工作空间内,速度传递性能评价指标在不同的姿态有不同的值。为此,分别定义KV和Kη在工作空间内的平均值为该拟人机械腿机构的全域线速度传递性能评价指标R(V)和全域角速度传递性能评价指标R(η):
式中,V为拟人机械腿机构的工作空间。
6 静力学性能研究
假设基座和各运动构件均为刚性构件,且忽略摩擦力。设F= (FX,FY,MZ,MX)T为参考点O2的广义输出力矢量,f′= (f1,f2,f3)T为驱动力,fi(i=1,2,3)分别为沿Pi(i=1,2,3)方向的驱动力,F′= (FX,FY)T仅受杆FO2绕F点的力矩M1的影响。为了便于分析,设F″= (M1,MZ,MX)T为参考点O2的广义输出力矢量。利用虚功原理,可以推导出f′与F″之间的关系。设在外力F″的作用下,参考点O2的广义虚位移为δι′,相应的输入端的虚位移为δp′。因此,各关节驱动力f所做的虚功之和为

外力F″所作的虚功之和为

由虚功原理知,当这种机构处于平衡状态时各外力所做元功之和等于零,即

虚位移δι′和δp′并非独立,由该并联机构速度雅可比矩阵所决定,即

综合式(31)~ 式(36),整理得

其中,G为这种机构的力雅可比矩阵。由式(37)可得

7 静力学性能评价指标的定义
考虑力和力矩为不同的量纲,式(39)可改写成如下形式:

其中,GM为力雅可比矩阵G的后两行。当这种机构不在奇异位形时,由矩阵分析理论,力雅可比矩阵G有奇异值分解,则存在正交阵CM∈R2×2、DM∈R3×3使:
式中,σ1、σ2分别为GM的两个奇异值,且σ1≥σ2。
当这种机构不在奇异位形时,设输入向量为单位向量,即

综合式(40)~ 式(42),可得
由式(43)知,当输入力为单位向量时,输出力分布在一个椭圆上[14],其轴长分别为σ1和σ2。由于力雅可比矩阵G随着动平台姿态的变化而变化,为了评价这种机构的力传递性能,本文定义力传递性能评价指标KF和力矩传递性能评价指标KM:

在拟人机械腿的工作空间内,机械腿不同姿态时,其力和力矩传递性能评价指标的值也不同。为此,定义KF和KM分别在拟人机械腿机构的工作空间内的平均值,为该拟人机械腿机构的全域力传递性能评价指标R(F)和力矩传递性能评价指标R(M):
8 拟人机械腿的各全域性能图谱
空间模型技术给出了各结构参数与各全域性能指标之间的分布规律[15-16]。这种膝关节和踝关节机构主要有10个结构参数,它们分别为a、b、c、f、θ、e、d、k和h。考虑拟人机械腿结构形式,将分别讨论大腿和小腿的结构参数优化。由于h=f和k=b/cos(θ1/2),结构参数a对整个拟人机械腿机构的运动学性能没有影响,故大腿的结构参数为b、c和f,小腿结构参数为θ、e和d。分别对大腿的主要结构尺寸参数与小腿的主要结构尺寸参数建立空间模型,并对大腿与小腿的结构尺寸参数进行量纲一化,令
则,k′1=b/P′,k′2=c/P′,k′3=f/P′,k″1=e/P″,k″2=d/P″,k″3=θ/P″。由于结构与装配的工艺性的要求,定义参数k′1、k′2、k′3和k″1、k″2、k″3的取值范围分别为
分别以k′1、k′2、k′3为横坐标轴和k″1、k″2、k″3为横坐标轴,由式(46)~式(48)建立大腿和小腿的几何空间模型ΔM′N′Q′和ΔM″N″Q″,如图2a所示。为了方便起见,将几何空间模型 ΔM′N′Q′和ΔM″N″Q″投影到xy系内(图2b),投影方程为
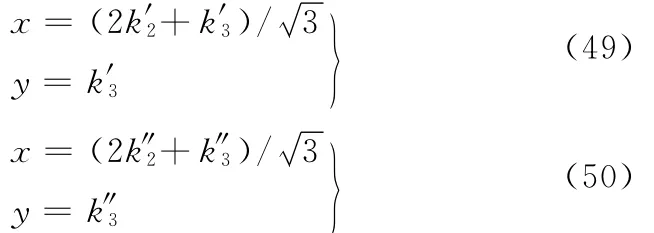
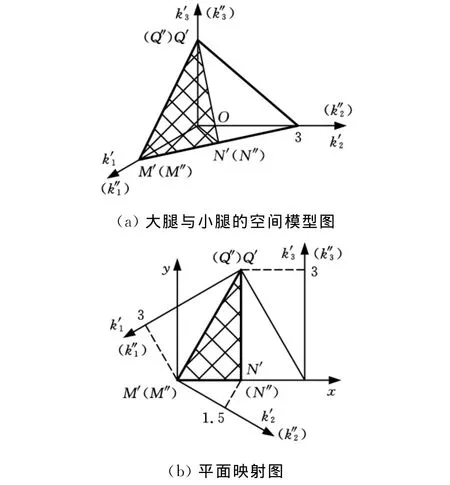
图2 大腿与小腿的几何空间模型及其平面映射
由式(1)~ 式(50),各性能评价指标与各结构参数之间的分布规律如图3、图4所示。
9 拟人机械腿的参数设计
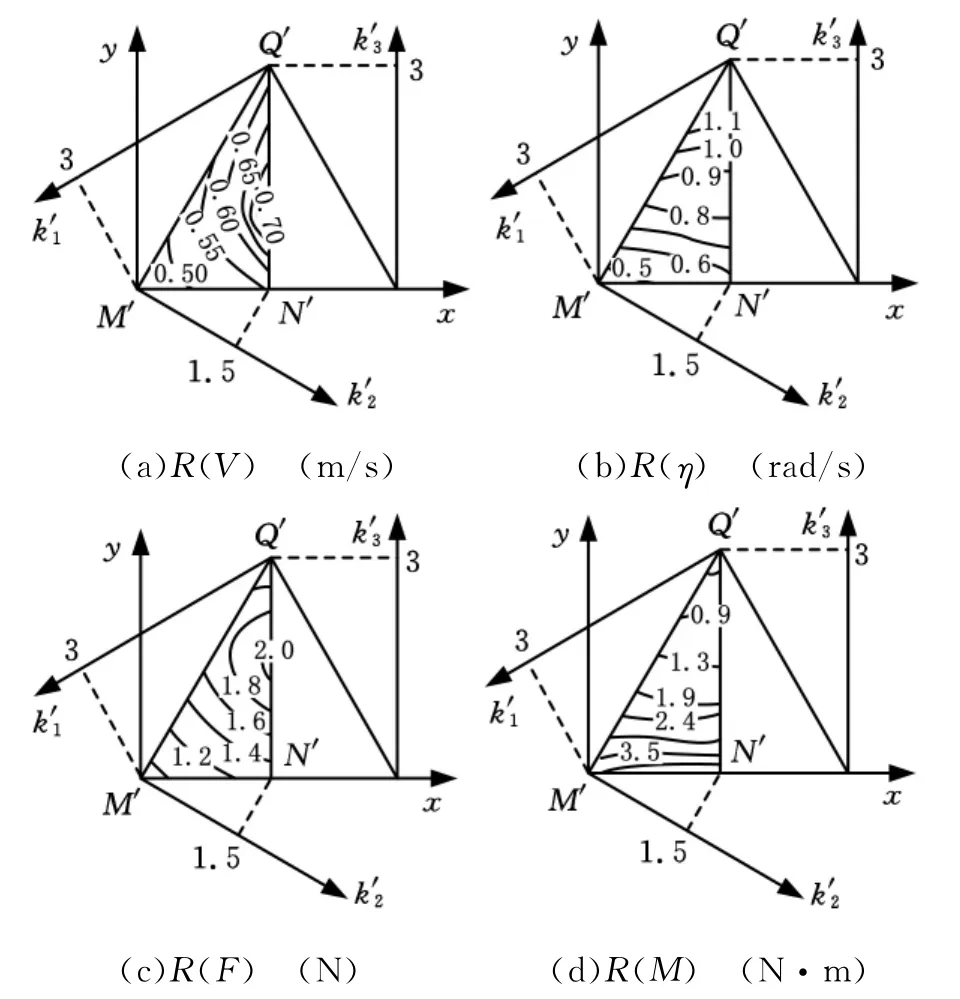
图3 拟人机械腿大腿机构的全域性能图谱
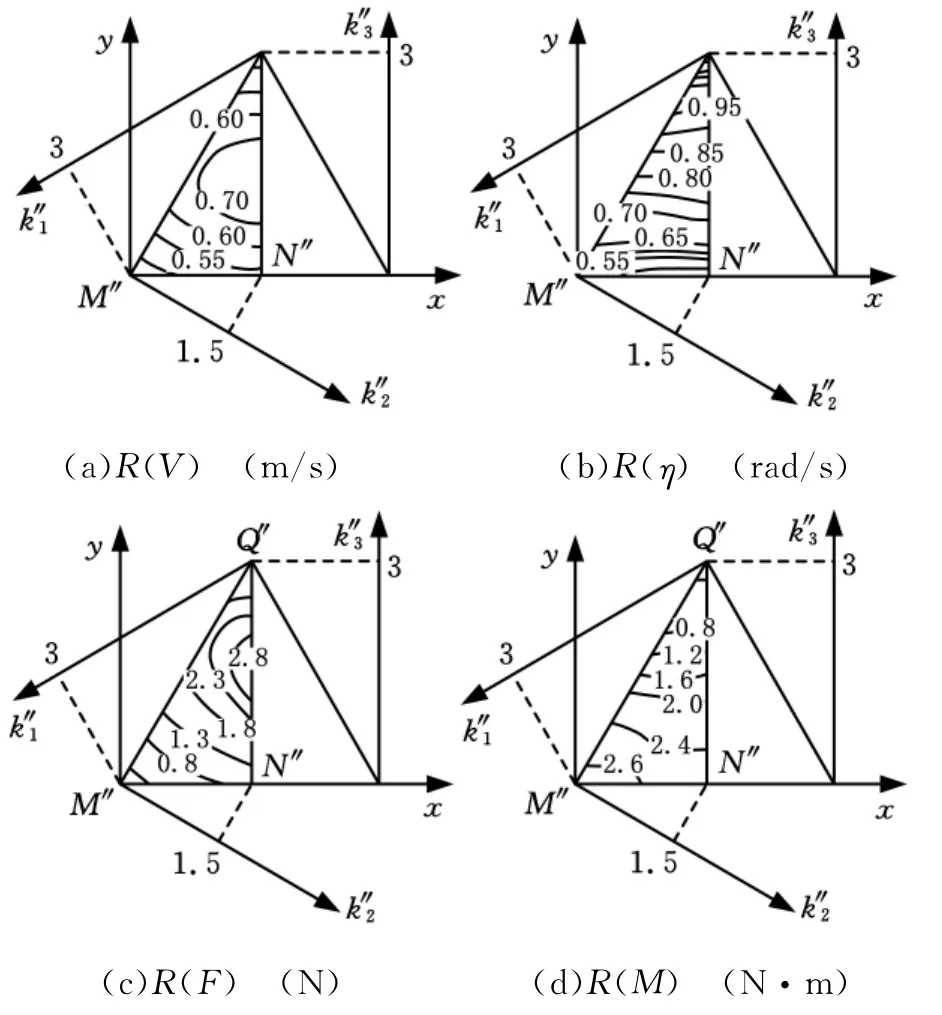
图4 拟人机械腿小腿机构的全域性能图谱
本文提出了一种多目标概率参数设计方法,该方法以多个全域性能评价指标为目标,在各个参数的取值范围内进行抽样,分别计算各组参数抽样值对应的各全域性能评价指标的值,判断是否满足各全域性能设计目标,给出各参数满足各全域性能评价指标的分布规律,选取合理的结构几何参数。
由图3和图4知,R(V)、R(η)、R(F)和R(M)的 最 大 值 和 最 小 值 分 别 为 0.9132m/s、1.1937rad/s、3.9086N、4.0183N·m 和 0.3218 m/s、0.2018rad/s、0.5321N、0.3561 N·m。以各性能评价指标的中间值为设计目标,即以R(V)=0.6265m/s、R(η)= 0.6978 rad/s、R(F)=2.2204N和R(M)=2.1872N·m为设计目标,当R(V)≥0.6265m/s、R(η)≥0.6978rad/s、R(F)≥2.2204N和R(M)≥2.1872N·m 时,各性能评价指标较好,分别在各主要设计参数的取值范围内按均匀分布进行抽样,在满足设计目标的情况下,统计各参数抽样值的分布规律,绘制频率直方图,见图5。图5中,横坐标分别表示各结构参数的取值大小,当给定一个结构参数时,可得到多组结构参数组合,计算出多组结构参数下的性能评价指标值,计算得到优于设计目标值的结构参数的组数与总结构参数的组数的比值。
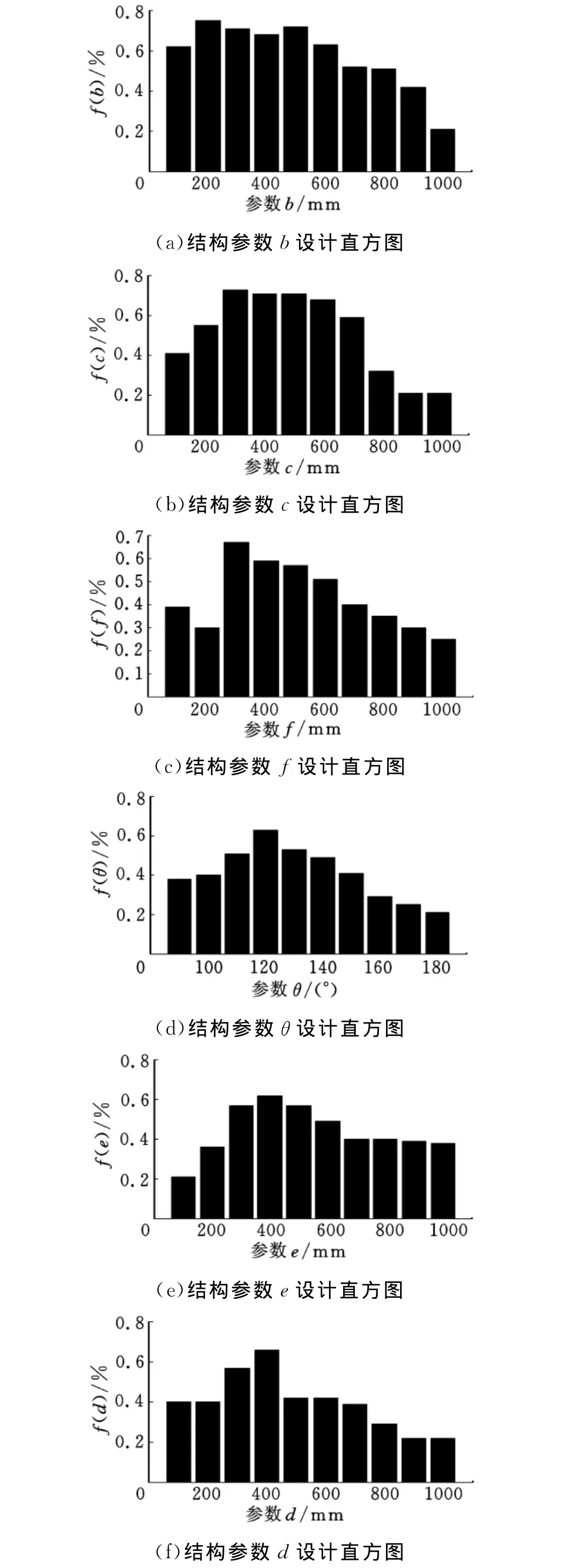
图5 拟人机械腿结构参数设计直方图
图 5 中,f(b)、f(c)、f(f)、f(θ)、f(e) 和f(d)分别表示达到设计目标值的概率。通过上述分析,同时考虑加工与装配工艺性,为这种腿关节机构选取了一组较合理的结构几何参数:b=200mm,c=150mm,d=450mm,e=450mm,f= 310mm,θ= 120°。 此 时,f(b)、f(c)、f(d)、f(e)、f(f)和f(θ)的值较大,R(V)=0.8927m/s、R(η)=0.8763rad/s、R(F)= 3.1856N、R(M)=3.9201N·m。
基于拟人机械腿的参数优化结果,同时考虑加工与装配工艺性,给出一种拟人机械腿的设计方案,如图6a所示,这种拟人机械腿与球面三自由度并联机构(作为拟人髋关节机构原型)串联在一起,构成拟人下肢的设计方案,如图6b所示。这种拟人机械腿机构的膝关节和踝关节采用4-DOF欠驱动机构为机构原型,通过三个电机实现膝关节和踝关节的运动方式,电机等固定件靠近腰部附近,减小电机等固定件产生的力矩,增加腿部的承载能力,减小运动惯性,发挥并联机构的优点,同时,这种新型拟人下肢可实现任何步态状况,具有主动控制步态的优点。因此,这种新型拟人下肢具有结构简单、承载能力强、运动惯性小、运动稳定等优点。
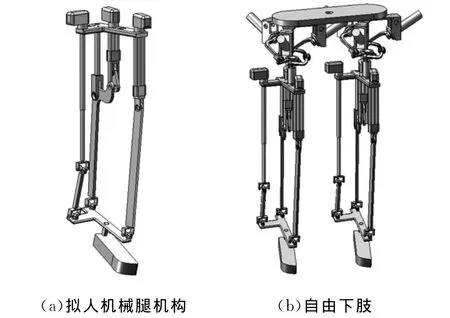
图6 拟人下肢的设计方案
10 结论
(1)提出了一种新型拟人机械腿及其概率参数设计方法,给出了位置反解方程、运动传递平衡方程和静力学平衡方程,定义了运动和静力学传递性能评价指标及各全域性能评价指标。
(2)对一种新型拟人机械腿进行了运动传递性能分析,给出了位置反解方程、运动传递平衡方程和静力学平衡方程,定义了运动和静力学传递性能评价指标及各全域性能评价指标。
(3)应用空间模型技术绘制了各全域性能图谱,给出了各结构参数与各全域性能图谱之间的映射关系图谱,为这种新型拟人机械腿的参数优化、轨迹规划和应用奠定基础。
(4)应用概率参数设计方法,选取了较合理的结构参数,同时考虑加工与装配工艺性,给出了拟人机械腿的设计方案。
(5)对新型拟人机械腿的承载能力进行了研究,与传统的串联机械腿相比,这种机械腿的承载能力大大增强,且其速度和力传递性能较好。
(6)这种新型拟人机械腿具有结构简单、承载能力强、运动惯性小和加工工艺性好等优点,适用于仿生机器人等领域。
[1]李艳杰,徐继宁,王侃.仿人机器人发展现状及其腰关节作用[J].沈阳工业学院学报,2004,23(1):18-23.
Li Yanjie,Xu Jining,Wang Kan.Development of Humanoid Robot and Its Function of Waist Joint[J].Journal of Shenyang Institute of Technology,2004,23(1):18-23.
[2]武明,季林红.基于能量的人体动力学平衡评价指标的仿真研究[J].清华大学学报,2002,42(2):138-171.
Wu Ming,Ji Linhong.Energy Based Criterion for Dynamic Balance of Human Body[J].Journal of Tsinghua University,2002,42(2):138-171.
[3]Lim H O,Ishii A,Takanishi A.Emotion-based Biped Walking[J].Robotics,2004,22(5):577-586.
[4]Berns K,Asfour T,Dillman R.ARMAR——an Anthropomorphic Arm for Humanoid Service Robot[C]//IEEE International Conference on Robotics and Automation.Detroit,Michigan,1999:702-707.
[5]马宏绪,应伟福,张彭.两足步行机器人姿态稳定性分析[J].计算机与自动化,1997,16(3):14-18.
Ma Hongxu,Ying Weifu,Zhang Peng.Posture Stability Analysis of Biped Walking Robot[J].Computing Technology and Automation,1997,16(3):14-18.
[6]Rao N M,Rao K M.Dimensional Synthesis of a Spatial 3-RPS Parallel Manipulator for a Prescribed Range of Motion of Spherical Joints[J].Mechanism and Machine Theory,2009,44(2):477-486.
[7]Huang T,Li Y,Tan G B,et al.Error Modeling,Sensitivity Analysis and Assembly Process of a Class of 3-DOF Parallel Kinematic Machines with Parallelogram Struts[J].Science in China Series E:Technological Sciences,2002,45(5):467-476.
[8]Liu H T,Mei J P,Zhao X M,et al.Inverse Dynamics and Servomotor Parameter Estimation of a 2-DOF Spherical Parallel Mechanism[J].Science in China Series E:Technological Sciences,2008,51(3):288-301.
[9]刘辛军.并联机器人机构尺寸与性能关系分析及其设计理论研究[D].秦皇岛:燕山大学,1999.
[10]刘冰,李剑锋,费仁元.基于遗传算法的并联微动机器人的机构优化设计[J].中国机械工程,2007,18(5):554-559.
Liu Bin,Li Jianfeng,Fei Renyuan.Design Optimization of Parallel Micromanipulator Based on GA Algorithm[J].China Mechanical Engineering,2007,18(5):554-559.
[11]Hao F,Merlet J P.Multi-criteria Optimal Design of Parallel Manipulators Based on Interval Analysis[J].Mechanism and Machine Theory,2005,40(2):157-171.
[12]李研彪,计时鸣,袁巧玲,等.机器人腿机构:中国,200910098461.6[P].2011-04-06.
[13]金振林,余跃庆.三维平动球平台机器人的位置与工作空间分析[J].中国机械工程,2006,17(6):574-577.
Jin Zhenlin,Yu Yueqing.On the Position and Workspace of a Novel 3- DOF Translational Spherical Platform Manipulator[J].China Mechanical Engineering,2006,17(6):574-577.
[14]熊有伦.机器人学[M].北京:机械工业出版社,1993.
[15]Li Y B,Jin Z L,Ji S M.Design of a Novel 3-DOF Hybrid Mechanical Arm[J].Science in China Series E:Technological Sciences,2009,52(12):3592-3600.
[16]Gao F.Relationships between the Shapes of the Workspaces and the Link Lengths of 3- DOF Symmetrical Parallel Manipulator[J].Mechanism and Machine Theory,2001,36(2):205-220.
