三相四桥臂逆变电源控制策略
2013-07-06肖蕙蕙
余 雷,肖蕙蕙,李 山
(重庆理工大学电子信息与自动化学院,重庆 400054)
传统的三相三桥臂逆变电源拓扑结构简单、功耗小、逆变效率高,但当三相的负载不对称,或者承受大量的非线性负载时,就会使三相电压产生畸变,影响三相电压对称输出[1]。随着三相负载不平衡的普遍应用,三相四线制逆变电源也逐渐被广泛使用。目前,使用最多的是带NFT的三相逆变电源,这种结构在输出端增加了中点形成变压器(neutral formed transformer,NFT),构成了变比为1的自耦变压器,如图1所示。
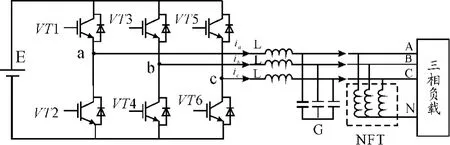
图1 带NFT的三相逆变电源
NFT的次级绕组的星形接法给不对称负载所产生的中性电流提供一个回路来抑制三相不平衡。但NFT的体积、质量随系统容量以及负载不对称程度的增加而增加,绕线与接线工艺更加复杂,NFT的自身功耗也降低了整机效率。
为了解决逆变电源供电系统带不平衡负载引起的电压畸变和降低整机成本、提高效率等问题,在图1所示的电源中加入一对新的桥臂构成中点来代替NFT,将此桥臂的引出线与三相输出公共点连接构成中线,从而构成三相四桥臂逆变电源[2-3],如图 2 所示。
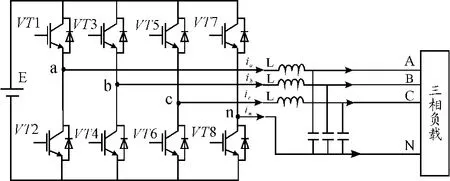
图2 三相四桥臂逆变电源
通过增加的这对桥臂,直接控制中性点电压,并且产生中性点电流流入负载。增加了一对桥臂,也就增加了一个自由度,使三相四桥臂逆变电源具有3个独立的可控电压,从而有能力在不平衡负载下维持三相电压的对称输出。
1 三相四桥臂逆变电源状态分析
三相四桥臂逆变电源可以看成3个单相逆变器的组合,VT1、VT2、VT7、VT8 构成 A 相逆变器,同理,VT3、VT4、VT7、VT8 构成 B 相逆变器,VT5、VT6、VT7、VT8构成C相逆变器。3个单相逆变器共用VT7和VT8组成的这对桥臂。三相四桥臂逆变电源的拓扑结构有4对桥臂,每对桥臂有2种开关方式,即上管导通、下管关断或者下管导通、上管关断,4对桥臂一共组成16种开关组合状态,由图2可以看出,各对桥臂的开关状态用状态符号 Si表示[4]。

式中:i=A,B,C,N,分别代表 A相、B 相、C 相和N相。
三相四桥臂逆变电源各状态及处于此状态的各相电压值,如表1所示。
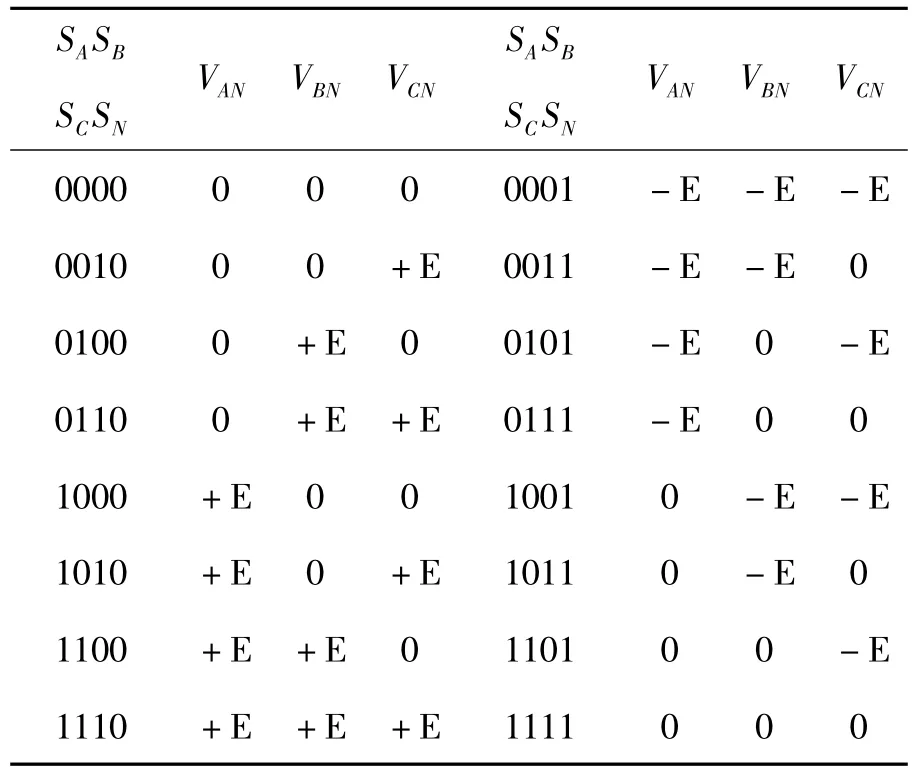
表1 三相四桥臂逆变电源状态表
由表1可以看出,0000和1111两种开关状态是一样的,这2种开关状态下,三相电路处于自由续流状态,所以三相四桥臂逆变电源一共有15种有效的开关状态。表1中的VAN、VBN、VCN为三相输出电压,当SN的开关状态为1,A、B、C三相任意一相开关状态为0时,则该相输出电压为反向电压-E;当SN的开关状态为0,A、B、C三相任意一相开关状态为1时,则该相输出电压为正向电压+E。
2 3D-SVPWM调制
3D-SVPWM即三维空间矢量脉宽调制,其主要思想是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,产生不同的电压矢量控制实际输出的磁链矢量,使其轨迹逼近圆形[4]。在三相四桥臂逆变电源的空间矢量调制中,普遍方法是将a-b-c静止坐标系转换为αβ-γ旋转坐标系,由于增加了一个桥臂,参考电压矢量轨迹由二维变为三维,实际上这种变换增加了控制的复杂程度,而在a-b-c静止坐标系下进行空间矢量合成可以省去坐标系变换中复杂的矩阵变换,其方法更为简单[5]。
将表1的16种开关状态分别表示为16个开关矢量,如表2所示。
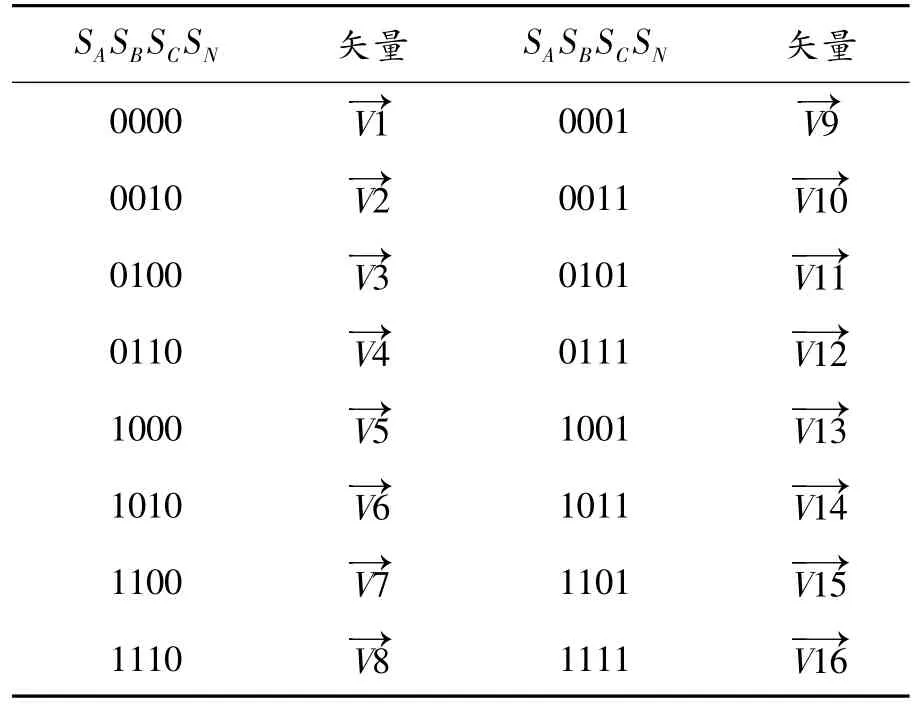
表2 开关状态与开关矢量对应表
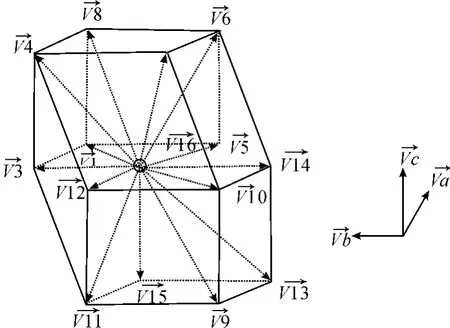
图3 逆变器a-b-c坐标系下开关矢量图
由图4得,所有开关矢量与坐标轴平行或成45°角,因此可以用平面和将控制区域分割成24个空间四面体。每一个空间四面体由2个零矢量和3个非零矢量构成,由此来判断给定参考电压矢量的位置。
为了使判断简单化,做如下定义:
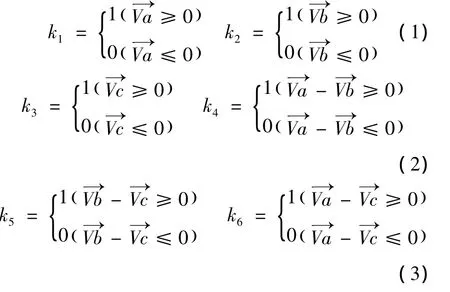
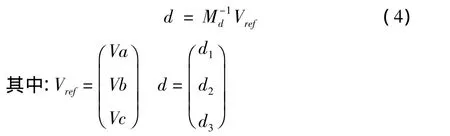
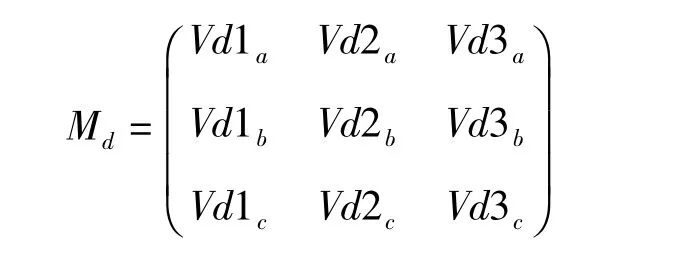
确定了24个空间四面体,需计算出3个非零矢量和零矢量所对应占空比,其中零矢量的作用时间d0=1-d1-d2-d3,共2个零矢量分别作用时间d0/2。非零矢量作用时间
对于任意时刻的合成矢量,首先确定其所在的四面体的3个非零矢量,然后加上2个零矢量来合理安排开关矢量作用时间顺序。本文选用双零矢量开关组合调制方式,这种对称排列方式使得THD最小,波形质量更好。以RP=23时各矢量开关占空比排列方式为例,此时RP对应的开关矢量为,开关的排列顺序如图4所示。
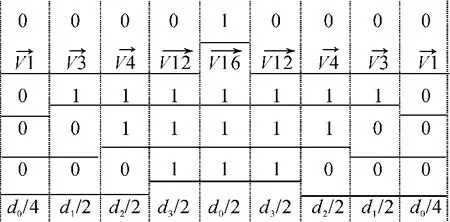
图4 双零矢量开关组合
3 前馈补偿控制
三相四桥臂逆变电源中,将三相滤波电感看成电源内部阻抗,当带不对称负载较重时,造成滤波电感产生的压降较大,使三相输出电压不对称输出。本研究将三相滤波电感上损失的电压作为前馈补偿,补偿叠加给各相输出电压参考给定值,就可以得到给定要求的三相对称输出电压[6],如图5所示。
4 系统仿真分析
根据以上分析,运用仿真软件Matlab/Simulink对三相四桥臂逆变电源进行系统仿真[7-8]。基本仿真参数:输入直流电压400 V;滤波电容30 μF;滤波电感2 mH;额定输出电压220 V;输出频率50 Hz;开关频率10 kHz;三相不对称阻性负载1:Za=5 Ω,Zb=1 Ω,Zc=30 Ω;三相不对称阻感负载 2:Za=5Ω +50mH,Zb=30 Ω,Zc=5Ω +2mH。分别对逆变系统2种不对称负载进行仿真。仿真结果如图6所示。
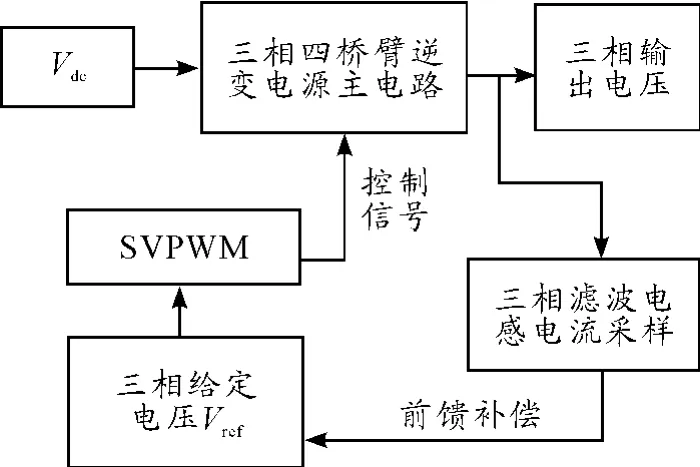
图5 加前馈补偿的3D-SVPWM控制原理
由仿真结果得到数据(表3),表明带不对称负载条件下三相输出相电压加前馈补偿控制依然能够保持对称输出,例如不对称负载1中不加前馈补偿的三相输出相电压THD均高于3%,加前馈补偿控制后三相THD分别为1.48%,1.56%,1.72%,三相输出相电压波形得到显著的改善。
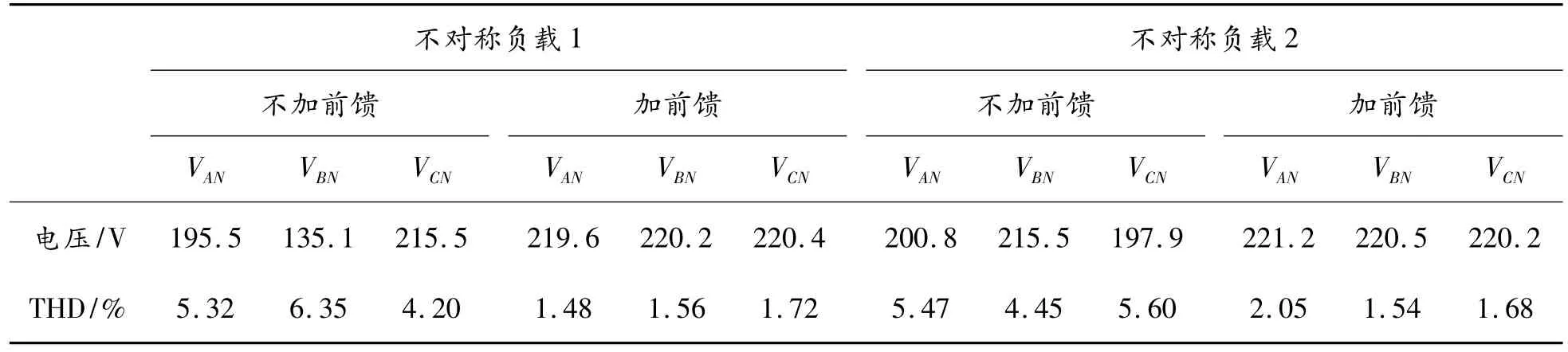
表3 仿真结果分析
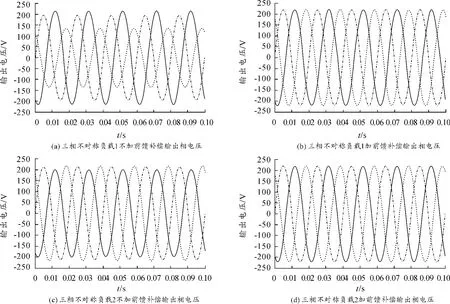
图6 不对称负载三相输出电压仿真图
5 结束语
三相四桥臂逆变电源减小了电源体积和质量,降低了整机成本,提高了直流母线侧电压利用率和整机效率。本文采用的3D-SVPWM与前馈补偿控制基本实现了三相逆变电路的电压解耦控制,使各相能实现独立调节。逆变控制系统具有带不对称负载的良好控制性能。
[1]彭力,白丹.三相逆变器不平衡抑制研究[J].中国电机工程学报,2004,24(5):174-178.
[2]Richard Zhang,Dushan Boroyevich,V.Himamshu Prasad.Three-Phase Inverter with A Neutral Leg Space Vector Modulation,conference Record of IEEE[J].APEC,1997,34:851-863.
[3]Jang-Hwan Kim,Seung-Ki Sul.A Carrier-based PWM Method for Three-phase Four-leg Voltage Source Converters[J].IEEE Transaction on Power Electronics,2004,19(1):66-75.
[4]曾允文.变频调速SVPWM技术的原理、算法与应用[M].北京:机械工业出版社,2010.
[5]吴睿.基于空间矢量控制的三相四桥臂逆变电源研究[D].南京:南京航空航天大学,2006.
[6]李登莹.静止坐标系下四桥臂逆变器3-DSVM调制方法研究[D].秦皇岛:燕山大学,2006.
[7]张化光.MATLAB/SIMULINK实用教程[M].北京:人民邮电出版社,2009.
[8]周又玲.MATLAB在电气信息类专业中的应用[M].北京:清华大学出版社,2011.
