基于MATLAB/GUI的GUSA无级变速器的运动研究
2013-03-20孙付春李玉龙
孙付春,李玉龙
(成都学院工业制造学院,四川成都610106)
20世纪70年代以来,由于汽车工业的快速发展,机械无级变速器获得了广泛的发展[1]。脉动无级变速器作为机械无级变速器中的一大类,其传动机构采用的均是平面四连机构的型式[2],结构上主要包括三相并列连杆脉动无级变速器(即GUSA型)和四相并列连杆脉动无级变速器(即ZERO-MAX型)。其中,GUSA型的技术更成熟、结构更紧凑、传动更可靠,目前应用较为广泛。平面四连机构作为经典的传动机构,历来是研究的重点,现有文献分别基于AUTOCAD[3]、Pro/E[4]、UG[5]、SolidWorks[6]、VC[7]、MATLAB[8]、ADAMS[9]、OpenGL[10]和 易 语言[11]等软件平台对其进行了运动仿真的研究,不过,采用MATLAB/GUI 图形用户界面系统对其进行界面和参数化的设计和仿真,尚不多见。为此,论文将针对GUSA型变速器中的连杆机构,展开进一步的研究。
1 GUSA型脉动式无级变速器
脉动式无级变速器结构上由传动机构、输出机构和调速机构3个基本部分组成[12],如图1所示。图中的平面四杆机构作为传动机构,将输入轴的匀速转动转变为摇杆的往复摆动;调速机构通过改变曲柄的长度来改变摇杆往复摆动的幅度;作为输出机构的超越离合器最后将可调幅的摇杆摆动变为脉动的单向转动输出。通过数个具有一定相位差的连杆-单向超越离合器组合机构,就可以使输出轴获得脉动幅度很小的单向旋转运动。
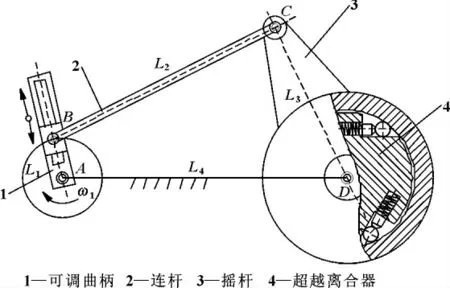
图1 脉动无级变速器的基本结构
2 运动分析
由图1知,曲柄摇杆机构是脉动式无级变速器的基本组成部分。在进行运动分析时,可以通过分析曲柄摇杆机构的运动规律,得到脉动无级变速器每一相的运动情况,对三相运动规律进行叠加,即可得到GUSA 脉动式无级变速器的运动规律。
在对机构进行分析之前,必须判断输入的杆长能否满足机构成为曲柄摇杆机构的杆长条件,即最短杆+最长杆≤其余两杆长度之和[13],如不满足,则要求重新输入杆长。
建立如图2所示的直角坐标系,设各构件的长度分别为L1、L2、L3、L4,其方位角分别为θ1、θ2、θ3、θ4。其中,θ1=0,θ2为待输入的已知值,θ3、θ4分别为
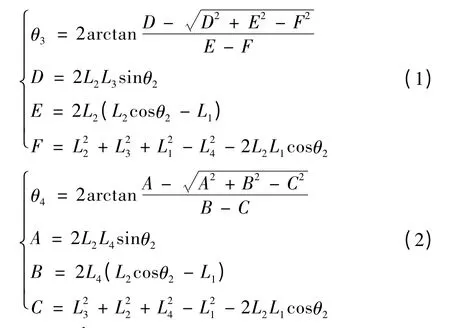
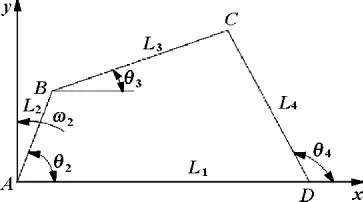
图2 四连杆机构简图
在图2中,以各杆矢量组成一个封闭矢量多边形,即ABCDA。由其个矢量之和必等于零。得

将式(1)分解到xy坐标轴上,即得到

式(4)等式两边对时间求一阶导数为

从而即可求得连杆和摇杆的角速度为

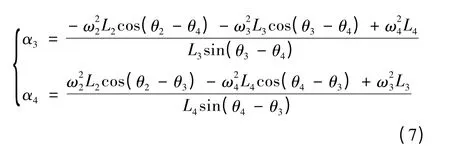
由式(6)可求得连杆和摇杆的角加速度为
3 MATLAB/GUI分析
首先设定曲柄转角θ2的范围和步长,然后每隔一定角度执行一次程序,可求得单相机构在某指定调速点位置时的运动规律;最后对同一θ2每相隔120°再进行两次调用,即可得到三相脉动无级变速器(GUSA型)无级变速器的运动曲线。
为便于参数化设计和仿真,采用MATLAB /GUI模块进行分析[14]。主要流程是在MATLAB 中启动GUIDE,并生成两个文件:一个文件是对GUI 和GUI组件进行完整描述的FIG文件;另外一个文件是包含控制GUI代码和组件回调事件代码的M文件,这两个文件与GUI 用户界面和后台程序相对应。程序设计的过程如图3所示。
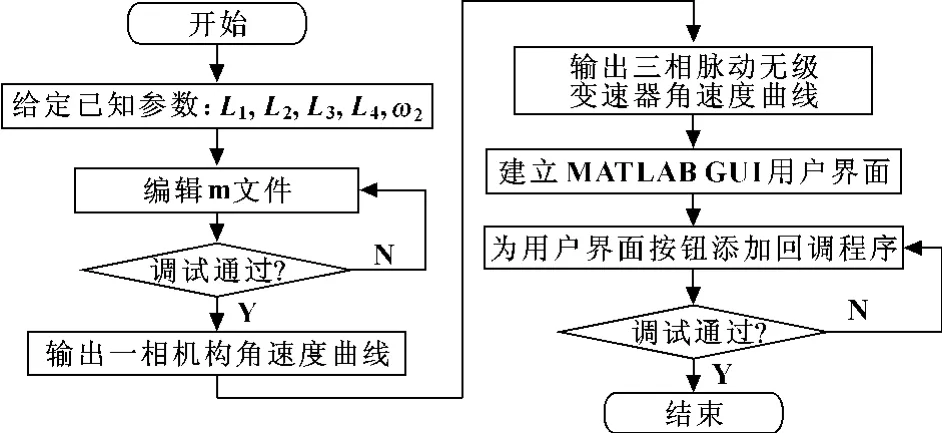
图3 程序设计流程图
具体步骤如下:(1)编写M文件。根据式(1)— (7)编写M文件,对编写的程序进行调试,在调试成功并得到预期的曲线之后,再进行MATLAB/GUI的用户界面设计。(2)界面设计。应用“拖拽”的方式在界面上设置文本框、输入输出框、下拉菜单、图形坐标、按钮和菜单栏等。(3)编辑回调函数。用户界面中的每一个输入输出框、下拉菜单和按钮等都有自己的回调函数。回调函数直接决定其功能的实现,因此必须对每一个进行编辑回调函数的操作。此用户界面的主要功能由下拉菜单决定,因此下拉菜单的回调函数就是整个GUI的主程序。
程序运行结果如图4所示,可以看出:由于三相脉动无级变速器只有角速度最大的那一相工作,三相机构是在曲柄的不同转角范围内分别起作用,故曲线的虚线部分将被“滤去”,实线部分将是变速器的工作曲线。
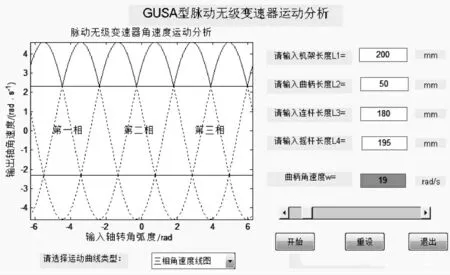
图4 GUSA脉冲式无级变速器运动特征的GUI分析
4 结论
GUSA脉冲式无级变速器可以看成由三相曲柄摇杆机构组成,可以通过分析曲柄摇杆机构的运动特性来研究该无级变速器的运动规律。应用MATLAB GUI可以实现对GUSA脉冲式无级变速器运动特性的参数化可视分析,为设计和分析GUSA脉冲式无级变速器提供帮助。
【1】周有强.机械无级变速器[M].北京:机械工业出版社,2001.
【2】孙付春.无级变速传动技术的研究[J].煤矿机械,2009(9):81-83.
【3】许翊鸣,沈希忠.基于AutoLISP的四连杆机构运动轨迹分析及应用[J].上海应用技术学院学报:自然科学版,2006(4):236-239.
【4】高辉,陈再良,吴电礼,等.基于Pro/E的四连杆机构运动仿真设计[J].苏州大学学报:工科版,2010(3):47-49.
【5】余振华.基于UG软件平台的四连杆机构运动仿真分析[J].机械研究与应用,2010(1):10-11.
【6】姜渭.SolidWorks 二次开发平面四连杆机构系统[J].现代机械,2011(3):59-61.
【7】李秋生,王勇,教光印,等.基于VC++液压支架四连杆机构的优化设计与分析[J].煤矿机械,2010(11):23-24.
【8】刘龙,黎炯宏.基于MATLAB的平面四连杆机构运动仿真[J].机电工程技术,2011(4):51-52.
【9】邱海飞.基于ADAMS的四连杆打纬机构动态设计与仿真[J].机械传动,2011(7):52-55.
【10】张俊文,董长吉.OpenGL 在煤矿液压支架四连杆机构运动仿真中的应用[J].矿业研究与开发,2006(1):54-56.
【11】郑晓伟,罗亚波.基于易语言的平面四连杆机构运动仿真[J].湖北工业大学学报,2007(8):54-55.
【12】阮忠堂.机械无级变速器设计与选用指南[M].北京:化学工业出版社,1999.
【13】王知行,邓宗全.机械原理[M].北京:高等教育出版社,2008.
【14】刘卫国.MATLAB程序设计教程[M].北京:中国水利水电出版社,2005.
