基于滑模变结构MARS的PMSM速度观测器研究
2013-03-20潘文英屈百达徐保国
潘文英,屈百达,徐保国
(江南大学轻工过程先进控制教育部重点实验室,江苏无锡214122)
永磁同步电机是交流伺服电机的一种,具有高转矩惯性比、高能量密度、高效率等优点,在航空、航天、电动汽车、工业控制领域获得了越来越广泛的应用。在伺服系统中,对速度的稳定精度提出较高要求,能够实行速度的闭环控制。因此速度检测元件的正确选择和构成速度负反馈控制的电路形式十分重要。高精度、高分辨率的速度传感器(例如光电编码器等)价格昂贵,不仅提高了伺服系统的成本,还限制了伺服驱动装置在恶劣环境下的应用。运用无速度传感器控制技术,通过各种速度观测方法在线估计电动机的速度,从而省去传感器,已成为一个研究热点。
近年来,国内外学者就如何辨识电机的转速做了大量的研究工作,提出了许多种方法,如直接计算法、模型参考自适应法(MARS)、扩展卡尔曼观测器、转子齿谐波法和高频注入法等。文献[1]采用了基于定子磁链矢量的参考模型和可调模型的MRAS方法。采用自适应算法调节上述两种模型计算的定子磁链一致,进而观测出电机转速,该方法的精度依赖于电机参数的准确性。文献[2]提出了一种高频注入法的控制方法,通过给电机注入高频电流,并检测电机电流的响应值来获取转子的速度信息,但只适用于低速无速度控制,对于无凸极效应的面装式PMSM控制效果不是很好。文献[3]研究了扩展卡尔曼滤波器估算方法,尽管采用该方法能获得较准确的转子速度,但仍然存在模型复杂、计算量大等不足。
目前,模型参考自适应法以其算法不太复杂、抗干扰性能好、能保证参数估计的渐进收敛性、稳态精度较高等优点而颇受重视,已经应用在无传感器PMSM 矢量控制中。但只有解决高性能伺服系统中的参数变化、扰动等控制问题,才能进一步提高系统的控制性能。滑模控制不依赖于控制对象的数学模型,只按实际效果进行控制,在控制中有能力并可以充分考虑系统的不精确性和不确定性。文中提出了基于滑模控制的模型参考自适应控制速度观测器的方法,仿真和实验结果表明,所提出的控制方法具有较强的鲁棒性和令人满意的动静态性能。
1 基于模型参考自适应控制速度观测
1.1 永磁同步电机数学模型
三相永磁同步伺服电动机在dq坐标系下的数学模型:
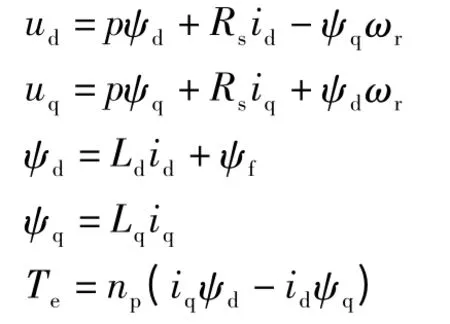
式中:ud、uq分别为d、q坐标系上的电枢电压分量;id、iq分别为d、q坐标系上的电枢电流分量。
图1为PMSM 无速度传感器系统框图。

图1 无速度传感器系统框图
1.2 模型参考自适应控制方法
模型参考自适应法采用了基于定子磁链矢量的参考模型和可调模型的MRAS方法。如果由可调模型估计的定子磁链矢量与参考模型确定的ψs相同,那么转速估计值一定与实际值ωr一致;如果两者存在偏差,说明估计值与实际值ωr不符。显然,转速估计偏差与两个模型估计的定子磁链矢量误差间一定有必然的联系,就是利用这个定子磁链矢量误差构建一个合适的自适应律。调节上述两种模型计算的定子磁链一致,使得可调模型的能逼近真实的ωr,进而观测出电机转速。
1.3 模型参考自适应法速度观测器的实现
PMSM 在dq坐标系下得定子磁链数学模型
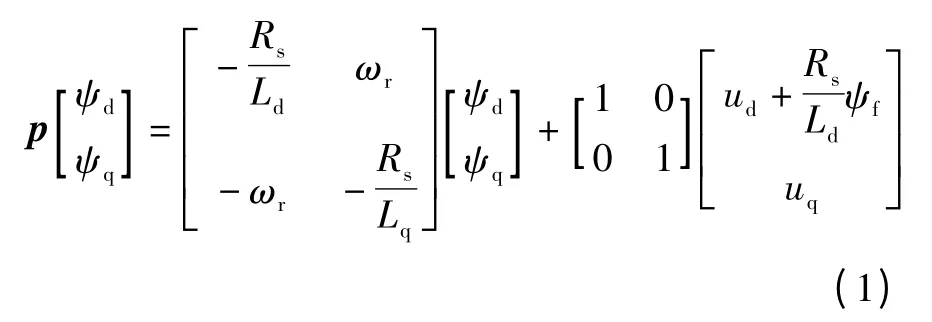
式中:ud、uq分别为定子电压d、q轴的分量;Rs为定子电阻;Ld、Lq分别为d、q轴电感;ωr为转速;ψf为转子磁链;ψd、ψq分别为定子磁链d、q轴分量。式中包含有转子速度,将其作为可调模型,ωr便是辨识的可调参数。
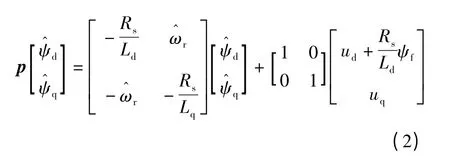
则构造参数可调的估算磁链模型为:
对应得:

线性时不变前馈系统G(S)=D(SI-Ae)-1为严格正实。
由popov 超稳定理论,若这个反馈系统稳定,其中非线性时变反馈环节必须满足下述不等式:

当D=1时,V=e,对popov 积分不等式进行逆向求解,便可得到自适应律。

式中:

将得到的ψd、ψq作为参考模型:

将式(2)作为可调模型,式(4)作为参考模型,组成模型参考自适应速度观测器如图2所示。

图2 模型PI 自适应速度器
2 基于滑模变结构自适应的速度观测
2.1 滑模变结构控制方法
根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动,即为滑模变结构控制。这种变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。
2.2 滑模变结构自适应速度观测器的实现
设计滑模变结构控制器的基本步骤包括两个相当对立的部分:
(1)设计切换函数s(x),使它所确定的滑动模态渐近稳定且具有良好动态性能。
滑动模态存在条件的成立是滑动模态控制应用的前提。如果系统的初始点x(0)不在s=0 附近,而是在状态空间的任意位置,此时要求系统的运动必须趋向于切换面s=0。式(2)为滑模控制的状态方程=f(x,u,t),设计切换函数
对切换函数求导得:
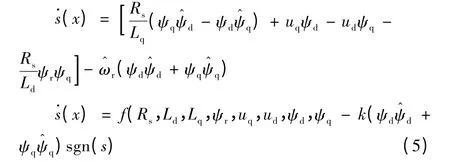
且当系统进入理想滑模状态时,即当s·(x)=0时,获得的为等效速度ωreq。
由式(5)得:

(2)设计滑动模态控制率u(x),使到达条件得到满足,从而在切换面上形成滑动模态区。常规滑模变结构控制的设计方法有常值切换控制、函数切换控制、比例切换控制。根据控制要求选用常值切换控制u=u0sgn(s(x)),其中,u0是待求的常数,sgn是符号函数。
一旦切换函数s(x)和滑模控制律u(x)都得到了,滑模变结构控制就建立起来。即=k·的低频分量为等效速度。
2.3 滑模变结构控制抖振问题
滑模变结构控制在本质上的不连续开关特性将会引起系统的抖振,抖振会影响控制的精确性,增加能量消耗,破坏系统的性能。可在滑动模态控制中引入准滑动模态,采用Sigmoid 连续函数代替切换函数,较传统滑模速度观测器减少了滤波环节和相位补偿环节。
滑模变结构自适应速度观测器(图3)转速估计为:

式中:H为Sigmoid函数,用连续函数代替切换函数。

式中:a为大于零的实数,根据实际情况而定。
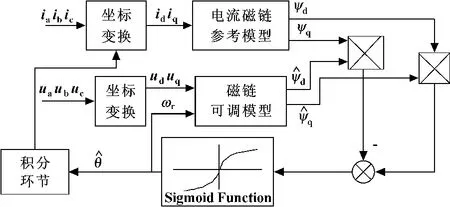
图3 滑模变结构自适应速度器
将基于模型参考PI 自适应无速度传感器的速度观测器与基于滑模控制的模型参考自适应无速度传感器速度观测器系统进行比较。
初始给定转速为2 000 r/min,在t=0.1 s时加入4 N·m的负载转矩,图4为突加扰动时的实际和估计转速。

图4 突加扰动时的实际和估计转速曲线
图4(a)为PMSM 实际转速输出与基于模型参考PI 自适应速度观测器的转速输出对比图,可以看出:估计转速输出与实际速度变化曲线几乎一致,t=0.04 s时趋向于稳定,且突加扰动时速度发生很小变化后稳定到给定值。图4(b)为PMSM 实际转速输出与基于滑模控制的模型参考自适应速度观测器的转速输出对比图,可以看出:加入滑模控制的速度曲线波动较小,更平稳,且于t=0.03 s时就趋向于稳定,突加负载扰动时速度变化更小。
当初始给定转速为2 000 r/min,在t=0.1 s给定转速变化为1 500 r/min,图5为此刻转速变换时的实际和估计转速。当速度发生突变时,速度观测器的估计转速动态响应快,跟踪性能好。图5(b)中加入滑模控制的速度观测器较图5(a)的模型PI 自适应速度观测器其稳态转速动态响应更快,更平稳,跟踪性能更好。从图6可以看出所提出的无速度传感器速度观测估计位置和实际位置几乎一致。由以上的仿真分析可以看出:无速度传感器的估计转速与实际转速非常接近,除了电机在刚启动时有较大误差,待系统稳定后,估计转速与实际转速趋向一致,达到很好的控制效果。而基于滑模控制的模型参考自适应无速度传感器具有更好的性能。

图5 转速变化时的实际和估计转速曲线
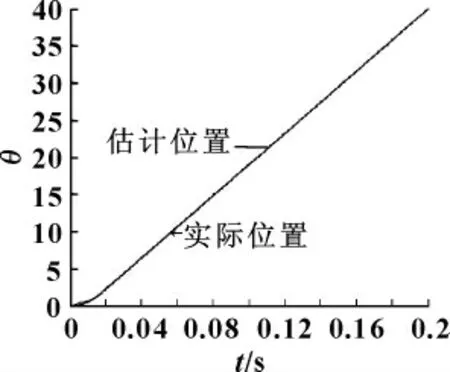
图6 实际位置和估计位置曲线
3 结论
采用无速度传感器辨识方法代替速度传感器来对永磁同步伺服电机进行速度辨识。通过对基于模型参考自适应控制的速度观测器和基于滑模控制的模型参考自适应控制的速度观测器方法进行仿真研究,可知后者能够更好地检测转子实际速度和位置,是性能更好的速度辨识方法,为交流伺服系统提出了一种很好的控制方法。
【1】秦峰,贺益康,贾洪平.基于转子位置自检测复合方法的永磁同步电机无传感器运行研究[J].中国电机工程学报,2007,27(3):12-17.
【2】王庆龙,张崇巍,张兴.交流电机无速度传感器矢量控制系统变结构模型参考自适应转速辨识[J].中国电机工程学报,2007,27(15):70-74.
【3】聂建华,燕婧婧.基于自适应EKF的PMSM 无速度传感器控制[J].电气传动,2011,41(3):16-18.
【4】樊立萍,杨林.电气伺服系统的自适应模糊积分滑模控制[J].电力系统及其自动化学报,2010,22(2):27-31.
【5】VACLAVEK P,BLAHA P.Lyapunov Function-based Flux and Speed Observer for AC Induction Motor Sensorless Control and Parameters Estimation[J].IEEE Trans Ind Electron,2006,53(1):138-145.
【6】HAN Y S,CHOI J S,KIM Y S.Sensorless PMSM Drive with a Sliding Mode Control Based Adaptive Speed and Stator Resistance Estimator[J].IEEE Trans on Magnetics,2000,36(5):3588-3591.
【7】刘金锟.滑模变结构控制Matlab仿真[M].北京:清华大学出版社,2005.
