影响摩擦力形成的本质因素探讨
2013-01-11马敬中冯杰刘学堂翁崇涛郭乐峰
马敬中 冯杰 刘学堂 翁崇涛 郭乐峰
(上海师范大学数理学院 上海 200234)
1 摩擦力的产生
两个相互挤压的物体,一物体表面原子与另一物体的表面原子之间相互作用的矢量和在宏观上表现为摩擦力.若在高真空中将两个表面经过精心抛光与细心清洁的金属放在一起,就没有办法使它们产生相对滑动.这是因为在物体表面如此光滑的情况下,两个金属表面的原子充分接触而立即冷焊在一起,合二为一.若在空气中将上述两个金属放在一起,虽然表面原子之间的接触少了很多,但是两金属块仍会紧密地粘连,分开它们需要用拧扳的方法.通常情况下,这样大量原子对原子的接触不可能发生.因为,即便金属表面经过高精细抛光与细心清洁,平整级别离原子尺度还差很远,更不用说日常生活中遇到的物体表面通常有氧化物薄膜及其他污染物,所以,大面积冷焊现象的出现几乎是不可能的.
放在一起的两个平常表面,相互接触部分只有表面上少数凸出点,实际的微观接触面积可能比表现的宏观接触面积的万分之一还要少.的确,许多接触点是冷焊在一起的.当施加外力使两个表面有相对运动趋势时,静摩擦力就在这些悍点之间出现了.
当施加外力使两个表面出现相对运动时,先出现这些焊点被撕裂,接着,随着移动和偶然接触的发生,连续出现焊点的再形成与断裂.就是在那些许许多多偶然接触点上的力的矢量和形成阻碍运动的动摩擦力.
被压得更紧的两个表面会有更多的冷焊点,因此,就需要更大的力使两表面相对滑动,存在一个更大值的静摩擦力fs.当两个表面正发生相对滑动时,连续形成与断裂的瞬时冷焊点会更多,因此,动摩擦力fk也更大.
2 摩擦力大小与表观接触面积的关系
两物体接触时,由于表面是粗糙的,只有个别粗糙峰(即微凸体)的顶部会发生真正接触,大部分区域是有间隙的,接触点呈离散型分布状态.各真实接触点的总和称为真实接触面积.真实接触面积只占表观接触面积的很小一部分,在载荷作用下接触峰点处的应力会达到材料的抗屈服极限σs而产生塑性变形.此后,接触点的应力不再改变,只能依靠扩大接触面积承受继续增加的载荷.如图1所示为微凸体接触状况.
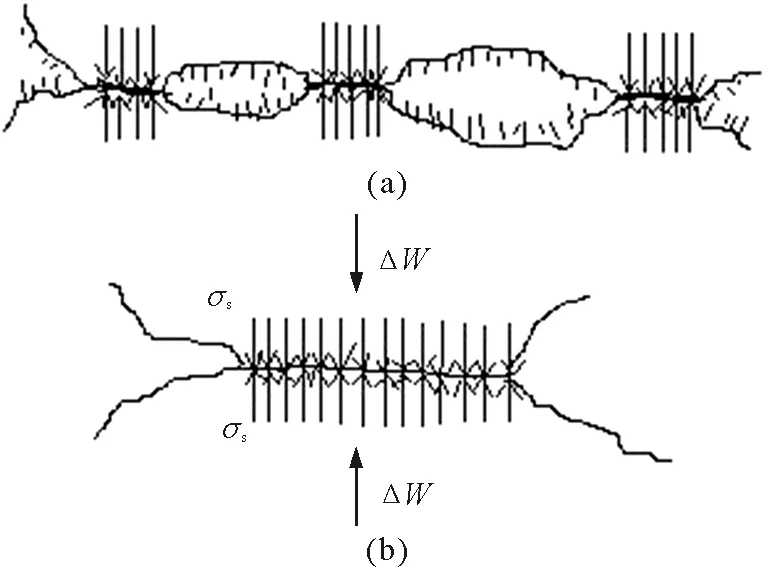
图1 微凸体接触状况
因为接触点的应力值为摩擦副中软材料的抗屈服极限σs,因而,真实的接触面积A可以表示为
(1)
其中W为载荷.由式(1)可知,摩擦力与表观接触面积无关.
3 摩擦力大小与法向力(正压力)的关系
(2)
其中FN为正压力.
如果需要一个切应力τc来剪切一个冷焊点,那么,最大静摩擦阻力为
(3)
由式(3)可知最大静摩擦力与正压力成正比关系.
4 动摩擦力大小与滑动速度的关系
滑动摩擦力的产生是由于随着移动和偶然接触的发生,连续出现焊点的再形成与断裂.阻止运动的动摩擦力就是在那些许许多多偶然接触点上的力的矢量和.由式(3)可知,当正压力一定时,两物体的实际接触面积是恒定的,也就是说,焊点形成的数目与撕裂的数目处在一个动态的平衡中.形成焊点的力与撕裂焊点的力的合力就与这种动态变化的数目有关.物体运动速度越快,焊点的形成与撕裂的变化也越快,所以,两接触体相对滑动速度越大,这种合力也越大,摩擦力越大.
以上分析可知,正压力一定时,滑动摩擦力的大小与滑动速度的大小正相关.
在中学物理探究滑动摩擦力大小与滑动速度大小的实验中,设计的实验是在同一水平桌面上两次拉动同一物体,使之相对桌面匀速运动,第一次速度较小,第二次速度较大,在误差允许的范围内弹簧测力计的读数是相等的,此实验的结论说明,滑动摩擦力大小与滑动速度大小无关.
这里存在一个疑问,为什么理论分析与实验结论是矛盾的呢?理论解释,动摩擦力的大小与滑动速度的大小有一定程度正相关是肯定的.但是实际上滑动摩擦力大小随滑动速度的大小变化时的改变量不是特别明显.假设在一定正压力下,两个接触的物体有N个焊点,由于焊点是原子或分子级别的,两个物体相对运动的一瞬间,N个焊点全部断裂又重新形成,焊点如此循环往复地断开与形成,摩擦力几乎为一个定值,而与相对运动速度无关.为了方便起见,经常假设滑动摩擦力大小与滑动速度大小无关.在速度不是很大或者很低的情况下,这是一个很好的科学近似.
尼姑寺的建筑多半都是新的,厨房、僧舍、大殿、甚至停车场,都给人一种欣欣向荣的感觉。陈莲曲珠师父说:“近年来,党委、政府十分重视尼姑寺的建设工作,才有了尼姑寺如今的良好局面。”
5 摩擦力大小与表面粗糙程度的关系
高中物理在探究滑动摩擦力的大小与接触表面粗糙程度时,设计了如图2所示实验,让同一个木块从木板斜面的同一高度滑下,水平面一个铺上毛巾,一个铺上棉布,通过比较三次木块的滑动距离得出结论,正压力一定时,接触表面越粗糙,物体受到的滑动摩擦力也越大.
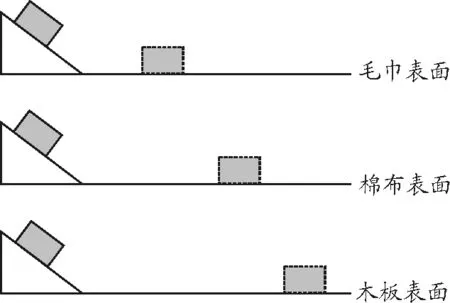
图2 探究摩擦力与接触表面粗糙程度的关系
其实,这是一个有争议的实验结论,在这个实验中, 木块的三次滑动过程中不只是接触面的粗糙程度改变了, 接触面的材料也发生了变化.从摩擦力的本质出发,接触面的材料改变,必然引起分子接触点的改变.所以,这个实验得出的结果是值得商榷的.
人们经常用表面粗糙程度来解释摩擦的产生.在力学中,人们描述有摩擦存在的表面为“粗糙”,而通常将“光滑”表面视为无摩擦.其实,对于多数粗糙表面而言,摩擦力与粗糙度无关,或者关系甚微.但是,对于特别光滑的金属表面,摩擦系数甚至要大于粗糙表面.粗糙度对摩擦的影响取决于很多因素,如在摩擦接触中存在的杂质或液体油膜.
放射性元素在两个接触体之间转移的实验证明摩擦与表面的关系很微弱[1].实验中一个放射性铜块放置在一个铜盘上拖动,铜盘的一部分粗糙度为25 nm,另一部分粗糙度是它的20倍(500 nm).粗糙程度有如此大的区别,但几乎对摩擦力和接触体间的材料传输没有影响(可以通过后来的放射性测
量看到),即摩擦力和磨损几乎与粗糙程度无关.
6 摩擦力方向与运动方向的关系
摩擦力的方向跟物体的相对运动方向或相对运动趋势方向相反.这里,相对性不是指别的参照物,而是指发生摩擦的另一个物体.这与摩擦力的起因有关,摩擦力的产生是由于焊点的形成与断裂,而焊点是由于两个接触体接触形成的,焊点的位置是关于两个接触体的相对位置,而不是由一个物体决定的,所以,摩擦力的方向是与两接触体的相对运动方向或相对运动趋势有关,而摩擦力总是阻碍这种相对运动或相对运动趋势,所以,摩擦力的方向跟物体的相对运动方向或相对运动趋势方向相反.
很多初学者会认为,某物体受到的摩擦力一定与该物体速度的方向在一条直线.其实不然,一个物体受到的摩擦力可与这个物体的运动方向成0°~180°夹角,下面举例说明.
【例题】如图3所示,一物体P放在水平转动的圆盘上随圆盘逆时针转动,求物体受摩擦力的方向.
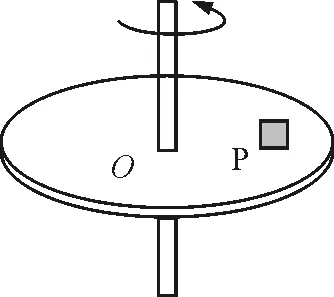
图3 小物体放在圆盘上转动模型图
解析:分下列3种情况讨论.
(1)当物体做匀速圆周运动时,受到的静摩擦力指向圆心,速度方向与摩擦力的方向如图4所示,α=90°.
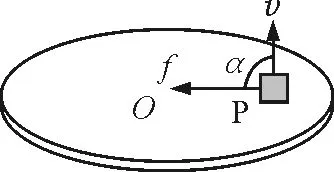
图4 情境1
(2)当物体与圆盘做加速转动时,物体受到的摩擦力与速度的夹角为α,α在0°~90°之间, 速度方向与摩擦力的方向如图5所示.
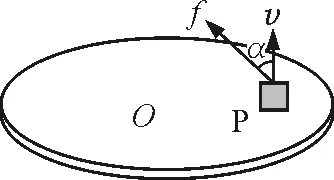
图5 情境2
(3)当物体与圆盘做减速转动时,物体受到的摩擦力与速度的夹角为α,α在90°~180°之间, 速度方向与摩擦力的方向如图6所示.
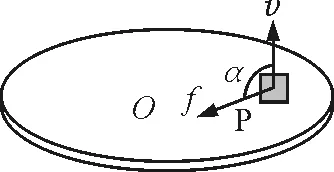
图6 情境3
7 结论
摩擦力形成的微观机制是一个相当复杂的过程,至今为止还没有定论.研究人员通过建模的方法来研究这个问题.20世纪50年代的Bowden和Tabor提出的“粘着摩擦模型”,他们认为摩擦力来自对真实接触面积粘着点或表面膜的切应力.用这一模型解释上述几个因素与摩擦力关系是相当契合的.但是微观上的精密分析有的时候与宏观表现是有差别,所以,研究问题时通常会有科学近似处理.摩擦力的大小还和很多因素有关,如两个接触体的接触时间、接触面的温度、接触面的表面膜等.没有统一的理论可以从微观上完全解释摩擦现象,但是随着现在摩擦学的发展,很多模型能分别应用于解释一些摩擦不同的微观原理.作为物理教师,我们可以用经典摩擦理论完成物理教学,但是有必要对摩擦的微观机制有一定的认识与见解,这样,才能把握好物理教学中的难点.
参考文献
1 (美)哈里德,瑞斯尼克,沃克著. 物理学基础.张三慧,李椿译.北京:机械工业出版社,2005.110~111
2 黄平, 孟永钢,徐华.摩擦学教程.北京:高等教育出版社,2008.64~65
3 (德)瓦伦丁,L·波波夫著.接触力学与摩擦学的原理及其应用.李强,雒建斌译.北京:清华大学出版社,2011.107~112
4 贺建制.有关摩擦力方向几个问题的探讨.科教纵横(科技创新与应用),2012(8)
5 周仲荣,雷源忠,张嗣伟.摩擦学发展前沿.北京:科学出版社,2006.117~118
6 E.Rabinowicz. Friction and Wear of Wear Materials.Second Edition.John Wiley & Sons. Inc.,1995
