一种GPS软件接收机的同步算法研究与仿真*
2012-12-10周帆
周 帆
(沈阳理工大学信息科学与工程学院,沈阳 110159)
0 引言
众所周知,导航信号是一种可供无数用户共享的信息资源,对陆地、海洋和空间的广大用户而言,只要拥有对导航信号的同步处理方法,就具有了接收GPS信号的能力,从而实现相应的预测、侦察、对抗、测量等功能。目前,伴随着卫星导航系统应用领域的进一步拓展,寻求一种性能可靠、通用性强、易于实现的软件接收机同步算法成为研究领域新的风向标[1]。
同步主要包括捕获和跟踪两个阶段,也称之为粗同步和精同步。就粗同步而言,主要包含伪码捕获与载波捕获,前者的目的在于复现扩频伪码,后者的目的在于对Doppler频移的补偿。粗同步不但可将收、发PRN码的相位差拉近在一个码元范围内,而且也将载波误差控制在一定范围之内,为精同步做准备。就精同步而言,同样包含伪码跟踪和载波跟踪,在完成粗同步的基础上,采用伪码跟踪环和载波跟踪环,进一步使码相位误差和载波误差控制在一个极小的范围内[2],为导航电文的顺利解调奠定基础。
1 GPS信号的粗同步
GPS卫星信号基于CDMA技术,采用不同的PRN码对不同卫星的导航数据先进行扩频处理后再进行载波调制。钟差和Doppler频移导致PRN码和载波频率发生偏移,这对接收机而言是无法容忍的。因此,为了接收某一卫星的导航信息,除了复现调制该导航数据的PRN码外,还必须搜索到对应卫星所产生的Doppler频移,这个过程即GPS信号的二维捕获过程[2]。考虑到捕获速度和硬件实现的便捷性,目前针对GPS L2频段信号主要采用圆周相关捕获算法[3]来实现GPS信号的二维捕获,该算法较传统捕获算法有明显优势。
1.1 圆周相关捕获算法工作原理
圆周相关捕获算法的理论依据是时域卷积定理,其目的是把GPS卫星基带信号与本地信号的相关结果转化为二者频域信号的乘积结果,即在频域实现信号的相关运算。其工作原理如图1所示。
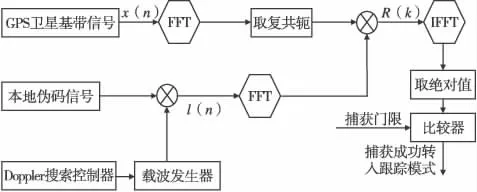
图1 圆周相关捕获算法工作原理
设x(n)表示GPS卫星基带信号,l(n)表示本地产生的PRN码和初始载波的乘积,则其时域相关结果r(n)可表示为,其中N为运算中所取数据段的长度。若对r(n)做FFT变换可得其对应的频域相关值R(k)为:
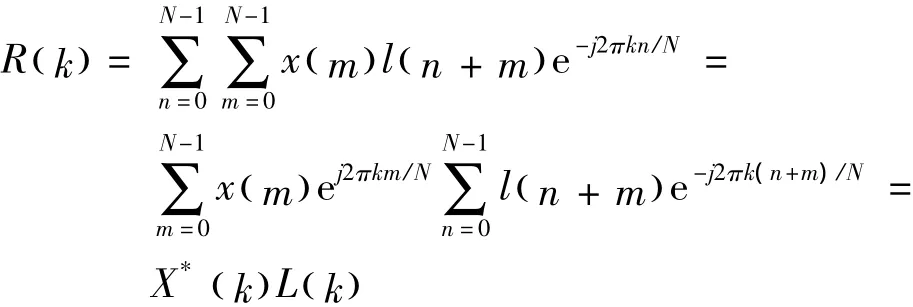
其中:L(k)表示l(n)的FFT变换;X*(k)表示x(n)的FFT变换的复共轭。若进一步对R(k)做IFFT变换便可以得到时域相关结果r(n),用此相关值和捕获门限相比较,便可达到捕获GPS信号的目的。
1.2 圆周相关捕获算法实现流程
Step1:C/A码周期为1ms,因此,对1ms接收到的GPS卫星基带信号x(n)进行FFT变换,将其转化成频域信号X(k);
Step2:求X(k)的复共轭X*(k);
Step3:在频率搜索范围内设定某一本地载波频率,并与本地伪码信号进行相乘后按照与接收信号相同的采样率进行数据采样,得到本地序列l(n);
Step4:对本地序列l(n)做FFT,将其转化成频域信号L(k);
Step5:将X*(k)和L(k)序列相乘,用R(k)来表示;
Step6:对R(k)做IFFT得到时域上的相关结果r(n);
Step7:将r(n)和捕获门限进行比较,超出捕获门限的r(n)对应的码相位和载波频率就是捕获到的伪码相位和Doppler频率。
2 GPS信号的精同步
在成功捕获到GPS卫星信号后,便可以采用锁相环对捕获环路的输出信号进行动态跟踪了。由于GPS信号是双相编码的信号,载波和码速率都会受到Doppler效应的影响,因此,为了跟踪GPS卫星信号就需要两个锁相环,一个跟踪伪码信号;另一个跟踪载波信号。
①伪码跟踪
伪码跟踪环是实现伪码同步的关键部件,该环路的设计是建立在载波频率未知这一假定基础上的,即在载波偏离标准值的某个确定范围内,这种码跟踪锁相环仍然能够继续发挥作用。因此,文中采用非相干全时间超前-滞后结构形式的锁相环作为伪码跟踪环路[4]。其工作原理见图2所示。
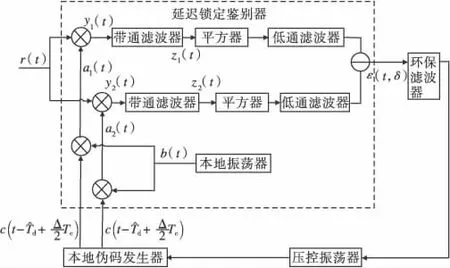
图2 非相干全时间超前-滞后锁相环工作原理
设输入信号r(t)是带导航电文的扩频信号与加性高斯白噪声信号之和,可以表示为 r(t)=其中:p表示输入信号功率;Td表示传输延迟;φ表示载波的随机相位;ω0表示载波的角频率;θ( t-T)d表示任意数据相位调制;n(t)表示高斯白噪声信号。


其中:k1表示从输入到平方器输入端之间的传输增益;ωIF表示中频频率;φ'表示随机本地振荡相位;Tc表示码片长度;表示延迟估计量,1/2·ΔT表示超前的码相位,-1/2·ΔTc表示滞后的码相位。
设带通滤波器的中心频率为ωIF,单边等效噪声带宽是BNHz。则带通滤波器的输出为式(3)和式(4),其中,Rc表示伪随机码的自相关函数,δ=表示相对时延误差。
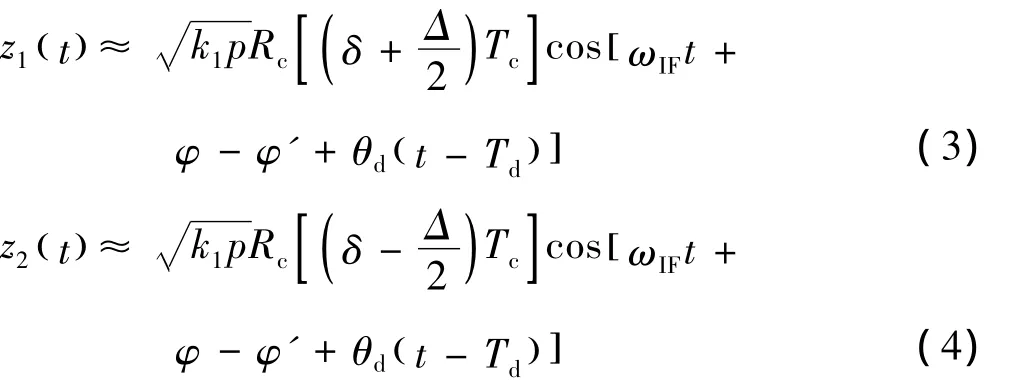
易知,平方器输出是基带分量和ω=2ωIF的倍频分量,而低通滤波器只允许基带分量通过。因此,延时锁定鉴别器的输出为式(5):
由式(6)易知,延迟锁定鉴别器的输出误差函数DΔ(δ)为周期函数,在δ=0附近DΔ(δ)是δ的线性函数。因为,当Δ =2时DΔ(δ)在δ=0附近的斜率为零,所以非相干延时锁定鉴别器的超前码和滞后码的相位差不能超出两个码元范围。
延迟锁定鉴别器的输出误差函数通过环路滤波器后,修正压控振荡器的频率控制字,使得压控振荡器的输出频率按照DΔ(δ)函数变化,从而进一步去控制本地伪码发生器的输出,以此达到跟踪的目的。
②载波跟踪
载波跟踪环的主要作用是对伪码跟踪环的输出信号进行解调,在得到导航电文数据的同时得到载波Doppler频移量,以实现对接收机的高精度测速。考虑到GPS信号中导航数据存在相位反转,因此文中选择对相位反转不敏感的Costas锁相环来实现载波跟踪,其工作原理见图2中载波跟踪环路部分。其工作过程是:首先,将输入的中频信号分别与本地载波的正弦和余弦分量相乘;然后,再分别通过低通滤波器I和低通滤波器Q,得到同相分量I和正交分量Q,这个过程相当于完成积分的作用;最后,把通过反正切鉴别器对同相和正交分量处理后得到的相位误差信号,作为环路滤波器的输入,其输出对应的误差信号反馈给压控振荡器,当环路进入锁定状态时,该环路的I支路输出导航电文数据,Q支路输出噪声能量。
载波跟踪环路中的鉴别器和环路滤波器是衡量一个环路工作状态的重要标志。考虑到反正切鉴别器具有高精度和对相位反转不敏感的特性,因此选择其作为载波跟踪环路的鉴别器[5-6],其计算公式为φ =arctan(Q/I)。此外,设计了两阶的环路滤波器来跟踪Doppler频移的变化,工作过程中每毫秒调整一次,使之接近输入的中频信号。设K1为压控振荡器的增益,K2为反正切鉴别器的增益,B是带宽,ξ为阻尼系数,T为积分时间,ωn为环路固有震荡频率,则环路滤波器函数及相关参数如下:
3 同步算法总体设计及测试评估
3.1 同步算法总体设计
图3给出了GPS软件接收机同步算法的总体设计框图。由图可知,捕获成功后立刻转入跟踪模式,跟踪过程中伪码跟踪环路和载波跟踪环路二者相互协同工作,伪码跟踪环路用到载波跟踪环路得到的载波频率,而载波跟踪环路同样也利用伪码跟踪环路获知的码相位偏移来实现对导航电文的解调。
3.2 同步算法测试评估
针对该算法的实现文中是在Windows平台环境下进行的,并选用Matlab为仿真工具,遵照GPS-ICD-200C中P码信号的产生机理生成PRN码。在试验中选取的仿真参数为:软件接收机中频1.25MHz、导航电文为50Hz的方波信号、采样频率5MHz、每次处理的数据段长度为1ms、每次处理数据点数为5000、FFT点数为5000、Doppler频移搜索范围为1.25MHz±5kHz、Doppler频移搜索步长为 100Hz、信号功率为-120dBW、信噪比为-35dB。

图3 GPS软件接收机同步算法总体设计框图
图4是针对GPS中第7#卫星捕获的测试结果,其中x坐标表示1~5000个采样点,对应于P码的相位;y坐标表示1.25MHz±5kHz的载波搜索范围;z坐标表示相关结果。由图4可知,最大相关峰值很明显的对应到1.251MHz和第4438个采样点的位置,即捕获到的Doppler频移为1kHz,捕获到的P码相位偏移量为4438个样点。测试结果表明,文中粗同步算法可以快速有效的捕获到载波频率和P码相位。
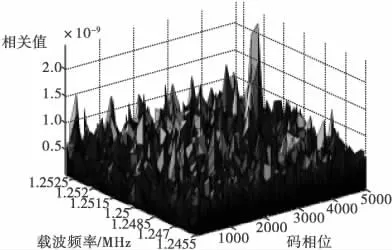
图4 圆周相关捕获算法相关峰值
由图3可知,当信号捕获成功后便可以转入信号的跟踪模式。伪码跟踪环路的输入来自于载波跟踪环路跟踪到载波频率和捕获环路输出的乘积信号;载波跟踪环路的输入来自于伪码跟踪环路跟踪到的伪码和捕获环路输出的乘积信号;只有当载波信号和伪码信号完全同步后,才能准确解调出导航电文。
设 K1=1,K2=1,B=100Hz,ξ=0.707,T=1ms,中频 ωIF=1.25 MHz,则由式(8)可求出ωn=283.0622Hz,另外由式(9)、式(10)可求出环路滤波器系数C1=0.3280,C2=0.0657。由图5可知,Costas环路只需25ms便可达到稳定状态,此时成功跟踪到的Doppler频移为1.2505MHz-1.25MHz=500Hz。
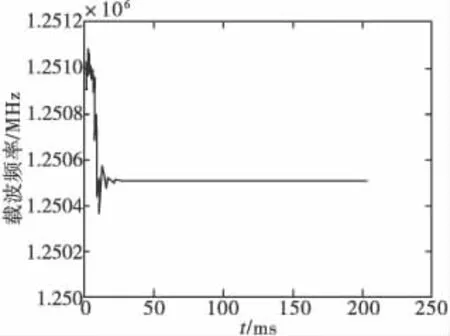
图5 Costas环路载波频率跟踪结果
图 6、图 7分别为载波跟踪环路进入稳定状态后 I支路解调出的导航电文和Q支路输出的噪声能量。若进一步对 I支路输出的导航电文进行抽样判决就可以得到电文对应的数据流。测试结果表明,该同步算法中各环路工作正常,可以快速准确的解调出导航电文。
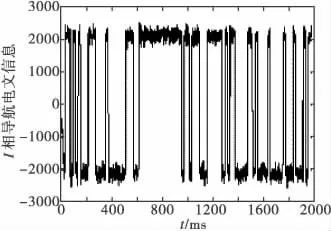
图6 Costas环路I支路解调出的导航电文
4 结论
文中从分析粗同步和精同步的算法角度出发,提出了一种GPS软件接收机的同步算法,并通过Matlab软件对该算法进行了测试评估,仿真结果表明,此算法可以很好的实现对导航信号的同步,并最终准确的解调出导航电文。考虑到同步过程是改善GPS软件接收机工作性能的关键,因此,文中的研究工作极大的促进了GPS软件接收机的理论开发,对今后GPS接收机的硬件开发具有一定的现实意义。

图7 Costas环Q支路输出的噪声能量
[1]Tsui J B.GPS软件接收机基础[M].陈军,潘高峰,李飞,等,译.2 版.北京:电子工业出版社,2007.
[2]Laura A Cheung.GPS receiver analysis[D].California State University,Fullerton,2000.
[3]Jing Pang,Frank Van Graas,Janusz Starzyk,et al.Fast direct GPS P-Code acquisition[J].GPS Solutions,2003(7):168-175.
[4]Peter Rinder,Nicolaj Bertelsen.Design of a single frequency GPS software receiver[M].Aalborg University,2004.
[5]Jin Seok,Jung Won Lee,Gyu-In Jee,et al.GPS signal processing algorithm for software GPS receiver[C]//ION GPS 2000:2338-2345.
[6]Premal Harish Madhani.GPS receiver algorithms for suppression of narrowband and structured wideband interference[M].University of Colorado,2002.
