宽频带相位测向系统相位补偿方法
2012-12-03李明亮刘晓宁李悬雷
李明亮, 刘晓宁, 李悬雷
(1.上海无线电设备研究所,上海200090;2.海军驻上海地区航天系统军代室,上海200233)
0 引言
被动导引头是反辐射导弹(ARM)的关键部件。被动导引头截获目标辐射的信号并实时检测出导弹与目标的角信息,传送给控制系统,导引导弹实时跟踪直至命中目标。方向角信息由导引头前端的微波接收机获得,再由后面的信号分选装置进行信号分选及角度处理。微波接收机是一个宽带的信号及角信息的接收系统,用于接收目标的角度信息和脉冲信息,由于目标辐射源频率范围较广,微波接收机的工作频带较宽,通常在几个GHz甚至十几个GHz以上。
为了消除信号幅度起伏的影响,以及提高测角精度并实现测角的实时性,多数被动导引头采用单脉冲体制,单脉冲的测角测向方法是用两个及两个以上的独立支路同时接收目标信号,然后再将这些信号加以比较[1]。单脉冲侧向法有振幅测向法和相位测向法,本文涉及的被动导引头测角系统采用的是相位测向法。对于相位测向系统,相位测量误差和零位误差直接决定了系统的测角精度。本文介绍了一种宽频带测向系统的相位补偿方法,以提高测向系统的测角精度,并给出了试验结果。
1 单脉冲相位测向原理
单脉冲的测向原理就在于用两个及两个以上的独立支路同时接收目标信号,然后将这些信号加以比较。通常对每个测向坐标平面都要采用两个独立的接收支路。单脉冲测向法可分为两种:振幅测向法和相位测向法。这里主要介绍相位测向法的原理。
相位测向法系统中,是将两个天线所接收到信号的相位进行比较来确定目标在一个坐标平面内的角度和方向。在远场区域内,两个天线都照射着同一空间范围,因此点目标辐射的信号,实际是振幅相同而相位不同。
如图1中所示,在两个距离为L的天线间连线,在连线上作中垂线(即等强信号方向),目标观测线与此垂线间的夹角为θ。设天线1与目标间的距离为R1,天线2与目标间的距离为R2,目标至L中心点的距离为R,R1与R2的差值为ΔR,远场可以认为是平面波,故可得到各表达式为
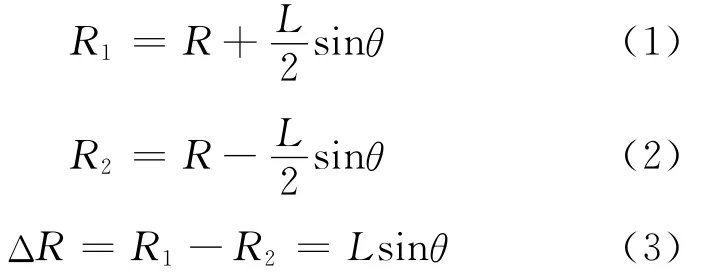
由此得到相位差为

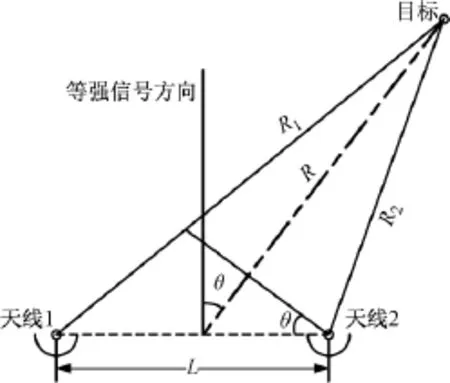
图1 相位法测向天线
式中:λ为信号波长。利用式(4),可以根据两个分开的天线所接收到信号的相位差来确定到达角θ即目标的方向[2]。
2 一种宽频带测向系统的相位补偿方法
2.1 系统基本构成
本文涉及的一种宽频带测向系统,采用两个独立通道的相位测角方法,工作带宽大于10 GHz,最高工作频率在X波段。微波接收机采用下变频方式,通过正交鉴相法测量通道相位差。系统简略原理示意图,如图2所示。
射频信号经混频后进行滤波放大等处理,最后两路信号通过正交鉴相器进行鉴相输出I、Q的正交信号。I、Q信号表示的是两路信号的相位差,按正余弦变化,I信号为相位差的正弦电压值;Q信号为相位差的余弦电压值,均为直流信号;系统输入单脉冲调制信号时,输出的I、Q信号为电压脉冲。其中一个通道加入移相器,其相移量为0°~360°,移相器的作用是补偿补偿通道的固有相差。对于相位测向系统,相位的准确度和零位误差将影响系统最终的测角精度。
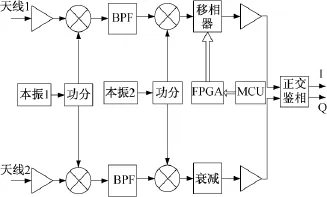
图2 宽频带测角系统示意图
移相器为数控移相器,由FPGA控制,相位补偿值通过MCU计算后传送给FPGA。移相器有八位主控、四位辅助控制,四位辅助控制主要进行移相精度补偿。
2.2 系统相位分析
当接收的信号的工作频率和接收机的本振源频率是恒定时,对公式(4)进行求导可得到角误差dθ和相位误差d(Δφ)的关系式为

由式(5)可知:为了使角误差dθ足够小,必须使相位误差d(Δφ)足够小。为此,对于系统两个通道的相位差,在硬件电路方面需保持高度的一致性,尤其是射频端,由于波长很小,较小的不一致也会产生较大的相位误差。系统两个通道由于不一致性而产生的相位差称为固有相位差,此相位差可以通过移相器进行补偿,使系统固有相差为零,但实际上,进行补偿后的相差不能绝对为零,称为剩余相差,此剩余相差应尽可能地小。
两个通道的电路可以等效为两根微带传输线,当两根传输线电长度完全相同时两者是没有相位差的。当信号变频时,采用可变本振,中频固定不变。设此时一路信号(天线1)为A1cos(ω0t +φ1),另 一 路 信 号 (天 线2)为A2cos(ω0t +φ2),两路信号的相位差为φ2-φ1(φ2>φ1);本振信号为B cos(ωLOt+φLO),当本振为高本振时,天线1通道中频信号为aBA1cos[ (ωLO-ω0)t+ (φLO-φ1) ],天线2通道中频信号为bBA2cos[ (ωLO-ω0)t+ (φLO-φ2) ],变频后两路中频信号的相位差为 (φLO-φ2)-(φLO-φ1)=φ1-φ2。可以看出经过下边带下变频时,两路信号的相位差值不变,但符号发生了翻转;同样可以证明经过上边带下变频时,两路信号的相位差值和符号都不变,即信号虽然变频,但相位差是连续不变的,因此两路信号鉴相前在任何位置接入移相器都具有相同的相位校准和补偿能力,并且需要校准和补偿的相位差值是相同的,但由于经过下边带下变频时,相位差符号有翻转现象,因此在不同位置接入移相器,其相位调整方向需要进行判断,移相器前有一个下边带下变频,移相方向就需要翻转一次。
此系统中,移相器放置在中频端,一方面可以节约成本;另一方面中频带宽较窄,有利于相位稳定。两个通道中只需放置一个移相器即可,且应放在相位差测试的基准通道上,如图2所示,此系统中输出的相位差为天线2通道的相位减去天线1通道的相位,移相器需放在天线1的通道中。
由于只在一个通道放置了移相器,且相位差有正负之分,当天线2通道减天线1通道的相位差为正值时,只需将移相器移相应的度数;反之当相位差值为负值时,将相位差加上360,得到一个小于360的正值,控制移相器移相与之相等数值的度数,即实现了通道相位差正负两个方向的相位补偿。
2.3 通道固有相差的补偿方法
据前所述,通道的固有相差是由于两个通道的不一致性而产生的,跟信号频率有关,并且与频率相关的部分主要产生于射频端,因为在第一混频之后为固定中频,此后产生的相位差不再与输入信号的频率有关,无论两路产生多大的相差都可以通过移相器进行补偿,固有相差补偿的难点在射频部分。
射频端由于频率高、频带宽,两个通道的硬件电路要做到高度一致才能保证两路相位差波动较小,而这在微波频段很难做到,因此整个频段内的相位差波动将无规律可循,采用线性插值的方法不能做到每个频点都能补偿的很好。这里采用逐点补偿的方法:
a)首先,设置移相器相移量为0°,从射频输入端口输入幅度和相位均相同的扫频信号,同时控制本振频率随之改变;
b)其次,逐个频点测试通道固有相位差,通道相位差可通过读取鉴相输出的I、Q信号获得;
c)最后,分别记录每个频点的通道固有相差,通过移相器移相进行补偿,即可将通道的相位差校准为零。
其中,本振频率的选择由本振码(二进制码)控制,本振码由外部传送给MCU,MCU通过读取的本振码计算本振频率控制信息,从而控制本振输出。
对于相位的温度补偿,由于环境温度改变时,根据试验验证,通道固有相差随温度近似呈线性关系且变化范围较小,故可采用线性插值的方法:
a)首先,测量正负极限温度及常温时通道的固有相差,建立成表;
b)其次,由温度传感器读取环境温度信息,MCU通过ADC将温度传感器输出的模拟电压信号转换为数字信号;
c)最后,根据温度信息,通过对常温与正负极限温度的三张数据表进行插值计算,得到当前环境温度下的通道相位补偿值,将此相位值按相位周期性换算至0°~359°之内。
将计算后的相位补偿值,通过并行方式传送给FPGA,由FPGA控制移相器移相,实现相位的补偿。FPGA的控制时间可以达到ns级,类似于开关的速度,可以达到相位快速转换的目的。
3 相位测试结果
某一频点下,输入两路幅度相同的射频信号,通过外部计算机控制,线性地改变两路输入信号之间的相位差,测试不同相位差时I、Q信号的变化。实测I、Q信号曲线,如图3所示。
在信号输入口输入幅度和相位相同的扫频信号,10 MHz一个频率点,同时控制本振频率同步改变,测试两个通道不同信号频率下的剩余相差。图4为通道全频带剩余相差的测试曲线,全频带剩余相差在±6°之内。根据测试,全温范围内的剩余相差也能满足系统的测角测向精度要求。
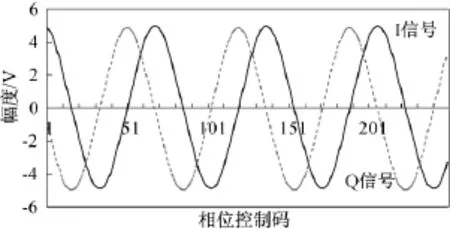
图3 实测I、Q信号曲线
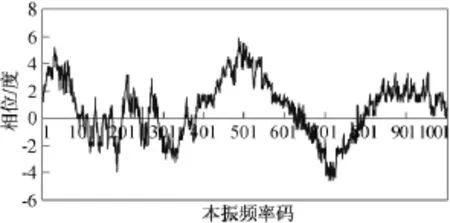
图4 剩余相差测试曲线
4 结束语
从试验结果可以看出,通过在双通道测向系统的基准通道放置一个移相器,由MCU软件计算,通过FPGA控制移相器逐频点进行通道固有相差补偿的方法,可以得到很好的测试结果,即宽频带剩余相差控制在系统允许的范围内,同时固有相差的温度变化也得到了很好的补偿。经过整个测角系统的试验验证,方向角测角误差小于1°,能满足高精度的测角测向要求。
[1] 赵建民,司锡才.宽频带被动雷达导引头的信号选择[J].船工科技,1987,(2).
[2] 司锡才,等.宽频带反辐射导弹导引头技术基础[M].哈尔滨:哈尔滨工业大学出版社,1996.
[3] 顾其净,等.微波集成电路设计[M].北京:人民邮电出版社,1978.
