应用于激光成像引信系统的仿真软件设计与实现
2012-12-03潘太玉张顺法马惠敏
潘太玉, 张顺法, 马惠敏
(中国空空导弹研究院,河南 洛阳471009)
0 引言
激光引信利用激光束探测目标,具有对空中目标进行全向探测的能力,是一种先进的主动式近炸引信[1]。激光引信具有方向性强、距离分辨率高、对电磁干扰不敏感等特点,广泛应用在空空导弹中。但现今的激光引信也存在一些不可忽视的问题,特别是空气悬浮粒子后向散射、超低空地物背景杂波干扰对回波信号的不利影响,降低了激光引信的抗干扰能力[2]。这个问题的解决途径之一就是通过引信对目标形体进行成像探测。国内在空空导弹激光引信的研制过程中,已经采用分光技术实现了引信周向分辨率的提高,但是距实现目标形体成像探测仍有较大的差距,难以达到通过图像识别来区分目标与干扰的目的。
本文介绍了一种能够提升激光引信抗干扰能力的激光成像引信技术,并概述了激光成像引信的基本工作原理,详细阐述了一种适用于激光成像引信系统的成像仿真软件设计与实现的方法。
1 激光成像引信技术
成像已成为当前国内外引信探测技术的一个重要发展方向[3]。它能使引信获得目标的二维图像并进行处理与识别,因而与现有激光引信相比,它具有更好的抗干扰能力,可满足引信对成像实时性与识别精确性的要求,有利于改善引战配合性能,提高对目标的毁伤效果。目前,国外发达国家纷纷开展激光成像探测技术的研究工作,如瑞典国家防卫研究所已经完成直接探测三维距离激光成像仿真,正在进行系统硬件设计和工程研究[4]。
要实现激光引信的成像,探测方式大致可有以下几种:
a)高密度多元环视探测;
b)光机扫描探测;
c)电光扫描探测;
d)多象限阵列探测等。
由于多象限阵列探测成像方式具有高周向分辨率、高扫描频率、易于实现等优点,本文中介绍的激光成像引信采用该种方式实现对目标形体的图像探测,实现周向不低于96元分辨率的激光引信成像探测。
系统功能原理图如图1所示。其工作原理:发射采用分时扫描方式,6象限激光光源按照60 k Hz的重复频率轮流发出的激光经发射光学系统整形为视野角为60°的薄扇形光束,经发射窗口发射出去,遇到目标后,来自目标不同部位的后向散射信号经引信的成像光学系统汇聚到APD的对应单元上,完成一次扫描后,各个象限的对应的像点组合成一行图像,随着弹目交会的进行,得到的图像行数不断增多。接收到的目标多元回波脉冲信号由小型高速信号处理识别器处理,输出引炸信号。
激光成像引信技术,利用激光束扫描目标,经目标反射形成激光回波二维图像,通过图像处理算法来区分目标与干扰,可以有效提高激光引信的抗干扰能力,尤其是抗悬浮粒子后向散射干扰的能力。通过建立激光成像引信系统的仿真软件平台可以获得丰富的图像数据,对于目标识别算法和激光成像引信技术的研究都具有重要意义。
图1 多象限阵列探测成像激光引信电原理图
2 仿真软件设计与实现
激光引信通过接收自身发出的激光束经目标表面产生的反射回波信号形成目标图像[5]。成像机理如图2所示。激光发射与接收系统装配于弹头后部,具有360°视场,激光束垂直于弹体发射,vp和vm分别为飞机和导弹的飞行速度,Δa为接收元的视场角。
图2 激光引信成像原理
假设光学系统共有m个接收元,每个接收元Rx有n路输出,一周可获取的扫描点数为m×n,即图像列数。
弹目交会过程中,假设t1时刻导弹处于空间位置d1,此时机身A部分进入引信视场,回波信号被接收元R1接收。经过Δt时间后,导弹处于空间位置d2,此时机身A部分退出引信视场,机身B1、B2、B3部分进入引信视场,相应的回波信号分别被接收元R2、R1、Rn接收,以此类推,直至目标完全退出引信视场。这样,在弹目交会过程中,通过对目标的扫描即可获得目标的二维形体图像。
2.1 成像探测系统仿真模型
激光发射器安装在弹体中部,围绕弹体一周,有多个等效的激光发射器,如图3所示。经由光学镜头展宽后,每一个激光发射器发出的激光将形成一定角度的薄扇面。据此,根据导弹模型参数,计算安装部弹体的半径,忽略发射器本身尺寸,将其简化成为一个圆环。将发射曲面离散为一系列的发射线,即把激光发射器认为是一系列的点发射器,然后计算发射线与目标模型曲面的交线。

图3 激光发射器示意图
飞机图像的获取,主要是根据线列探测器的物理特性,在反射能量和二值图像之间建立一个模拟接收器响应的阈值函数。
在弹体一周,同样有数目与发射器相同的等效线列接收器,每个线列接收器有32路信号输出,如图4所示,每一路输出只对以某一特定角度范围入射的激光有效。由此,将线性阵列探测器等效为一系列的点接收器,位置可认为与点发射器重叠。
图4 单一线列接收器示意图
2.2 目标图像的生成
为得到更为真实的目标表面特性,本文采用目标飞机的真三维网格模型,该模型由1 173个三角面片、2 500多个顶点组成的,可以较好地反映目标表面的反射特性。在VC环境下对原始数据进行坐标平移和旋转处理后,利用OpenGL接口函数可以得到如图5所示的可视化三维网格模型。
图5 目标三维网格模型
2.2.1 弹目交会建模
弹目交会模型是进行计算机仿真的基础。因此,在进行计算机仿真前必须建立弹目交会的数学模型。综合考虑计算复杂度和仿真效率等因素,对弹目交会运动过程作如下假设:
a)忽略导弹弹体、目标机体上存在的震动力、大气中的风力和地球引力等因素对导弹和目标运动所产生的影响;
b)导弹弹体和目标机体上各质点的速度矢量均等同于各自整体运动的速度矢量;
c)弹目距离较近,可认为目标和导弹各自独立地作匀速直线运动。
以上三项假设在工程计算中是合理的,基本不影响仿真结果。在此前提下,按下述方法建立了弹目交会的数学模型。
(1)建立SKS交会模型
设目标速度矢量为vM,导弹速度矢量为vD,分别过目标速度矢量vM、导弹速度矢量vD作一对互相平行的平面U和V,目标上某一反射面的中心位于空间一点F,激光引信回波接收窗口中心位于空间一点D,当视线DF与导弹轴线夹角为某规定值β时,则将此时所对应的时刻规定为弹目交会时间坐标的原点T1。T1时刻过F作一平面P与导弹运动直线垂直,垂足O定为空间直角坐标原点。导弹速度矢量方向与Z轴正向一致,Y轴在P面内与U垂直,正方向指向U平面,X轴正向由右手定则来判定。时间坐标轴T与空间坐标轴Z轴重合且方向一致。这就建立起了以导弹和目标两个速度矢量(S)为参照物的空间(K)、时间(S)弹目交会模型,简称SKS模型,如图6所示。
图6 SKS交会模型
(2)坐标变换
一般情况下,模型数据及弹目交会的运动参数都是在世界坐标系下给出的,各自独立,仿真时,需要将模型数据及运动参数统一变换到SKS模型中,并选择导弹坐标系作为参照坐标系进行坐标变换。
在导弹坐标系中,导弹本身位于坐标系原点并且静止不动,直接读入模型参数即可获取其顶点坐标数据,而目标的模型顶点坐标位置则需要通过给定的运动参数进行计算,这一过程即为坐标变换过程。坐标变换的主要任务就是计算目标模型在新坐标系中的顶点坐标以及速度矢量。
在导弹坐标系下,目标顶点坐标变换流程如图7所示。
图7 目标模型坐标变换流程
设初始给定的目标模型参数中某一顶点坐标为P=[x0y0z0],新顶点坐标求解方法如下。
首先对目标模型按目标姿态角参数进行旋转。注意,旋转计算必须按照滚动角、俯仰角、偏向角的顺序依次进行,否则无法得到正确的结果。各旋转矩阵分别为
滚动角旋转矩阵(以X轴为旋转轴)为
俯仰角旋转矩阵(以Z轴为旋转轴)为
偏向角旋转矩阵(以Y轴为旋转轴)为
旋转后的顶点坐标为

然后对目标模型进行平移,平移后的顶点坐标为

其中:
最后,对平移后的目标模型按导弹姿态角进行旋转。此时,各旋转矩阵分别为
偏向角旋转矩阵(以Y轴为旋转轴)为
俯仰角旋转矩阵(以Z轴为旋转轴)为
滚动角旋转矩阵(以X轴为旋转轴)为
最终得到的顶点坐标为

根据上面的方法即可完成目标模型其它顶点的坐标变换。
(3)运动模拟
在导弹坐标系中,导弹是相对静止的,因此只需根据导弹坐标系中目标的速度矢量和激光器发射频率来计算每次目标移动的距离,就可以仿真得到每次激光发射后线列接收器所能接收到的信号,从而生成激光线扫图像。
假设给定目标运动速度为vt、目标中轴线中心位置O、中轴线上的点P1,经过坐标变换后,O在导弹坐标系下的坐标为O′,P1在导弹坐标系下的坐标为P′1,设导弹运动速度为vm,则在导弹坐标系下,目标的速度矢量为

假设在导弹坐标系下,目标模型的某一顶点坐标为Q,则每次激光发射后Q的坐标为

式中:f为激光发射器的发射频率。
2.2.2 激光回波功率的计算
在一个较窄的粗糙度范围内物体表面接近于理想朗伯体[6]。显然,位于窄发射视场内的飞机蒙皮可以看成是一个朗伯体,于是,激光引信所能接收到的激光回波功率可由下式求出:

式中:Pe为激光发射器功率;τ1为激光发射器的光学透过率;τ2为激光接收器的光学透过率;ρ为目标表面的漫反射率;As为激光接收器的光敏面积;φ为光敏面中心O′与由激光照射形成的光斑中心O的连线与光敏面的法线n′的夹角;Rl为弹目距离。
计算回波功率时,需要计算出目标表面由激光照射形成的光斑的中心点,由该中心点、接收面元中心点和面元的法向量即可求得角φ和Rl,代入公式可求出目标表面某一处的漫反射回波功率Ps。图8表示了某接收元与飞机蒙皮上照射光斑的位置关系。
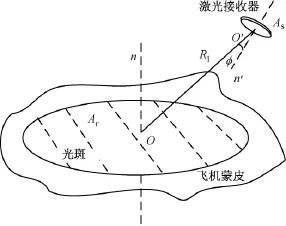
图8 接收元与光斑的相对位置
2.2.3 仿真图像生成算法
图9表示了激光引信仿真图像生成的全过程。其中,消隐处理(即光线与面片相交情况的判断)是图像生成算法的关键部分,它在很大程度上决定了图像生成算法的优劣。
基本假设:
设弹目均处于导弹坐标系下,从点激光发射器中心O′到目标模型上某三角面片ΔABC三个顶点的向量分别为a、b、c,某激光发射光线为Ri。
a)若条件(14)满足逻辑表达式(13),则发射光束Bi与三角面片ΔABC相交,式中,θ为激光束张角;
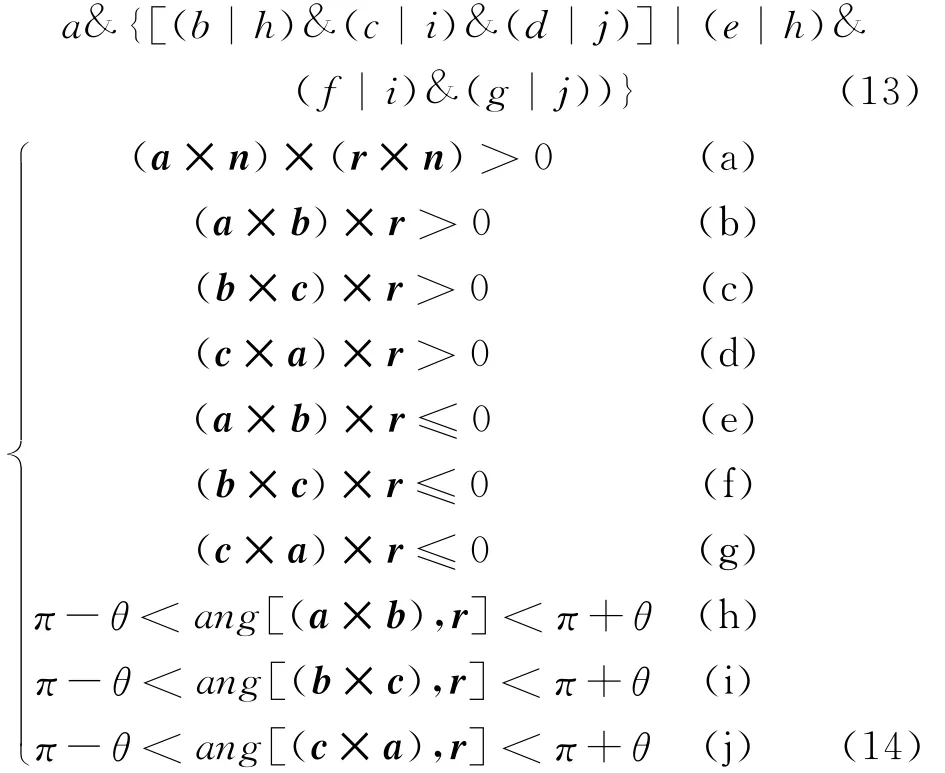
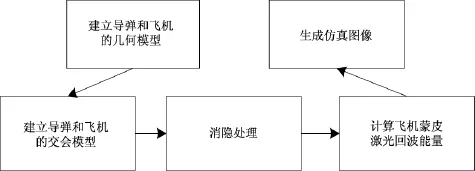
图9 激光近场探测仿真图像生成流程图
b)通过计算确定出与光束Bi相交的三角面片ΔABC;
c)将光束Bi在张角θ范围内等间隔地分为k个同心光环,再将每个光环等间隔分为k条光线,则光束Bi被等效为k2条光线;计算光束的等效光线Bij与三角面片ΔABC的交点pij,并由此求出每条等效光线的φj和Rlj;
d)按照式(15)计算出回波功率,并根据设定的阈值判定是否有像素输出。
图10是采用此算法仿真生成的飞机图像。
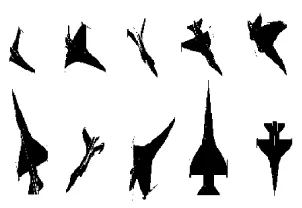
图10 飞机仿真图像
3 结束语
本文介绍的激光成像引信技术,能够有效提高激光引信的抗干扰能力。提出了一种适用于激光成像引信系统的成像仿真软件设计与实现的方法。通过此仿真软件,得到了丰富的图像数据,通过与真实图像的对比,验证了此仿真设计的正确性,利用这些图像可以进行目标识别算法的研究,对于成像激光引信技术的研究具有重要意义。
[1] 郑志伟.空空导弹系统概论[M].北京:兵器工业出版社,1997.
[2] 王建国.空空导弹激光引信抗环境干扰的方法[A].重庆:中国兵工学会引信专业委员会第十三届引信年会论文集[C],1995.
[3] 孔有发.国外激光引信的现状及其发展趋势[J].现代引信,1992,(4).
[4] Steinvall O,Kiasen L.3D Laser Sensing at FOI-over-view and a System Perspective[J].Proceedings of SPIE,2004,(5412):294-309.
[5] 郑链,王克勇,马惠敏.成像探测体制智能引信概念研究[A].引信技术新概念专题研讨会论文集[C].西安:《探测与控制学报》编辑部,2000:51-55.
[6] 许士文,张正辉.激光近炸引信目标特性测试方法分析[J].红外与激光工程,2007,36(1):64-68.
