反舰导弹导引头试验数据采集系统设计
2012-12-03薄志峰
马 艳, 薄志峰
(中国人民解放军92941部队92分队,辽宁 葫芦岛125001)
0 引言
未来战争对于武器装备的作战要求向着“快速、精确、高效”的方向发展,而导引头对于反舰导弹的命中精度、突防能力、抗干扰能力等都起着至关重要的作用,因此对导引头性能指标的检验是导弹试验与鉴定过程中一项非常重要的内容。导引头需要检验的指标主要包括导引头作用距离、捕捉可靠性、跟踪稳定性、环境适应能力以及抗干扰性能等,要想全面检验导引头的性能仅靠几次导弹飞行试验是远远不够的,而且完全靠导弹飞行试验来检验也是很不经济的。这是一个多目标的试验设计问题。
本文针对反舰导弹导引头试验与鉴定,采用运筹学中的动态规划法进行试验阶段总体设计,提出最优路径,在不同阶段研究试验数据采集分析方法,设计数据采集设备,获取典型试验数据信息,分段对导引头的性能进行分析与评估,为下一阶段试验提供子样和依据,为最终试验结果的分析评定奠定基础。
1 动态规划法基本思想
运筹学主要研究解决实际问题时的系统优化思想,从提出问题、分析建模、求解到方案实施整个过程具有一整套严密的科学方法。按照所解决问题性质的差别,可分为线性规划、非线性规划、动态规划、图论与网络分析、存贮论、排队论、对策论等分支。其中,动态规划是研究多阶段决策过程最优化的运筹学分支,适合解决大型复杂试验的设计问题。
动态规划法研究多阶段决策过程的总体优化,目标是达到整个活动过程的总体效果最优。将整个活动按时间顺序分解成若干相互联系的阶段,每个阶段依次进行决策,上一阶段的输出状态是下一阶段的输入状态,本段决策的执行将影响到下一段的决策。因此,从系统总体出发,使由各阶段序列构成的目标函数值达到最优。
动态规划法的基本思想如下[1]:
a)将多阶段决策过程划分阶段,恰当地选取状态变量、决策变量及定义最优指标函数,从而把问题化成一族同类型的子问题,然后逐个求解;
b)求解时从边界条件开始,逆(或顺)过程行进方向,逐段递推寻优,在每一个子问题求解时,都要使用它前面已求出的子问题的最优结果,最后一个子问题的最优解,就是整个问题的最优解;
c)动态规划法是既把当前一段与未来各段分开,又把当前效益和未来效益结合起来考虑的一种最优方法,因此每段的最优决策选取是从全局考虑的。
2 导引头试验阶段设计
试验设计在充分考虑考核被试品性能指标评定要求的前提下,还要考虑试验经费、试验设施、试验装备等实际条件,设法以较少的投资获取最大数量的有用试验数据,做到资源高度共享,信息高效融合。
针对导引头的多项性能指标考核,遵循动态规划法的思想,可以按时间特征将整个导引头试验过程划分为实验室静态试验、导引头对海试验、导引头海上挂飞试验三个阶段,在不同阶段获取典型试验数据信息。
(1)实验室静态试验
在实验室环境下,可以利用目标模拟器等设备模拟测试导引头的各项性能指标,如检验导引头接收机灵敏度、目标记忆能力、主被动导引头数据融合能力等。还可以对导引头加载各种干扰,如欺骗干扰、压制干扰、噪声干扰等,采集并记录导引头在各种干扰环境下的工作状态,分析导引头的抗干扰能力。
(2)导引头对海试验
将导引头架设在海边,在海背景条件下选择适当航路,利用真实目标(舰艇或者模拟靶船)的运动来检验导引头的各项性能指标,如导引头作用距离、目标选择性、捕捉可靠性、跟踪稳定性、跟踪精度、环境适应能力以及抗干扰性能等。
(3)导引头海上挂飞试验
在接近实战环境条件下,利用机载飞行试验的可重复性,动态检验导引头的功能及性能指标,以及导引头对海杂波的抑制能力和导引头的突防能力,为后续导弹飞行试验奠定基础。
考虑到试验经费等实际条件,接下来要研究在总试验投资一定的前提下,每个试验阶段尤其是第二、三阶段的组织实施方案,合理控制试验次数,统筹安排试验项目,以达到最优决策的目的,为最终试验结果的分析评定奠定基础。
分析每个阶段的试验目的,结合导引头动态飞行试验模式,有些试验项目可以结合进行,一个试验项目可以安排多个性能指标的考核,合理优化试验方案,有效缩短试验周期。导引头试验项目可以大致合并为以下五类:
a)项目一:作用威力、连续跟踪;
b)项目二:搜索扫描、目标识别、稳定跟踪;
c)项目三:末段跟踪、角闪烁;
d)项目四:环境适应能力;
e)项目五:抗干扰能力。
实验室静态试验阶段可以安排项目一、二、三、五,试验组织和实施方便,可以多次重复进行;对海试验阶段可以安排项目一、二、四、五试验,但试验组织和实施较困难,试验消耗较大,试验次数要适当;海上挂飞试验阶段可以在接近实战环境条件下,安排所有项目试验,但相对来说试验组织和实施最困难,试验消耗最大,试验次数要尽可能减少。
表1为三个阶段不同试验项目参数选取表,表2为各个试验项目预期效益计算表(列举数据仅供参考)。其中,试验实施方便性与组织一次实验的试验投资mi成反比,获取数据有效性是对于导引头最终试验结果的评定而言的,Xi为每个阶段试验次数。
在总试验投资m一定的前提下,将其投资于三个试验阶段mi(i=1,2,3),每个试验项目的预期效益分别为gj(j=1,2,3,4,5),以获取最大效益,由此求出每个阶段的试验次数Xi(i=1,2,3)。当然对于实验室静态试验中,不同试验项目X1可以为不同值,在此统一记为X1只是为了表达直观。建立动态规划模型如下:
求X1,X2,X3,使 max gj=g1jX1+g2jX2+g3jX3,且满足约束:
应用动态规划方法救解,按逆推的方法,首先考虑第三阶段投资,再考虑第二、第一阶段投资。于是有:阶段k,本例中取1,2,3。
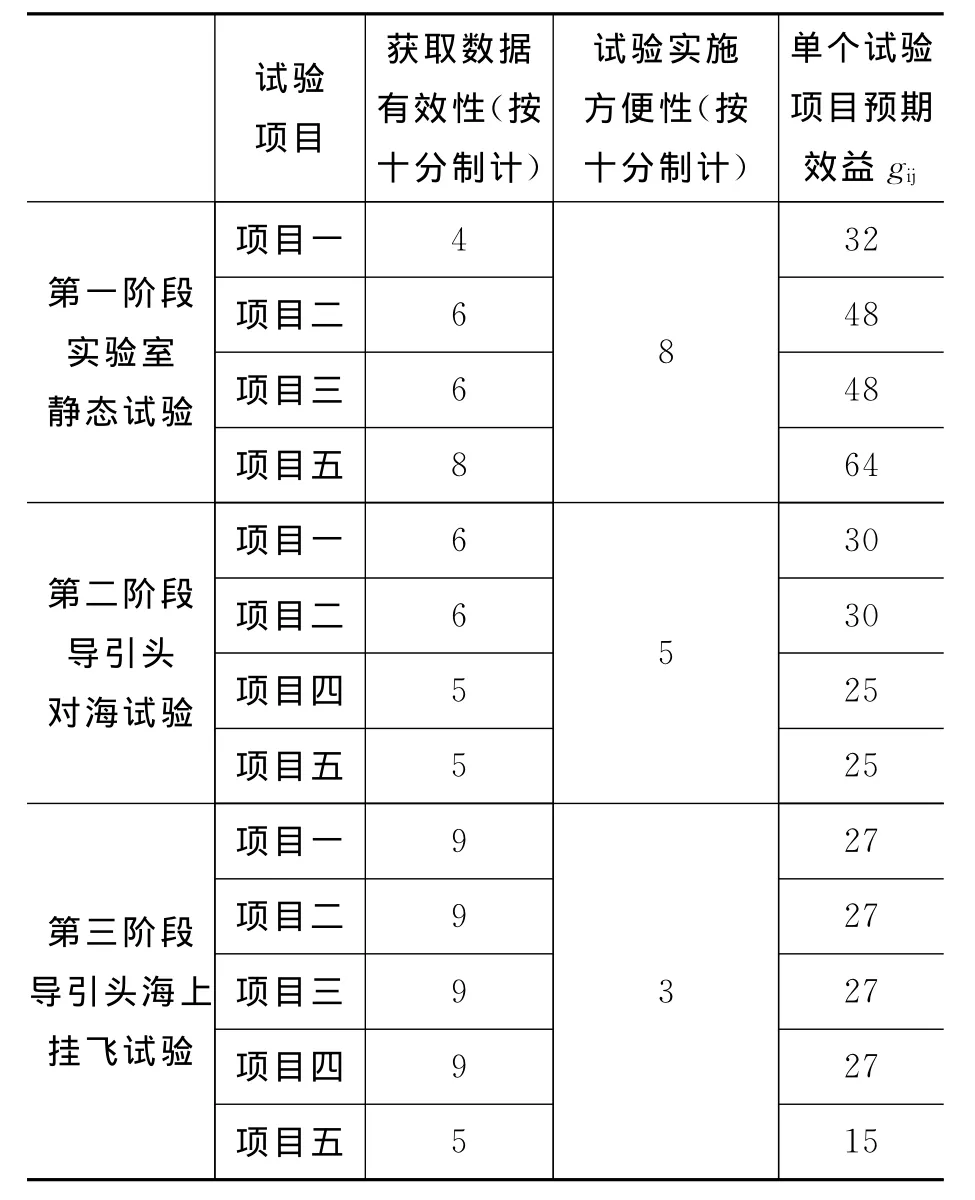
表1 三个阶段不同试验项目参数选取表(示例)

表2 预期效益计算表(示例)
状态变量Sk:第k阶段可以投资于第k至第3阶段的资金。
决策变量mk:决定给第k阶段投资的资金。
状态转移方程为

最优指标函数fk(Sk):当可投资金为Sk时,投资第k至第3阶段所得的最大效益。
基本方程为
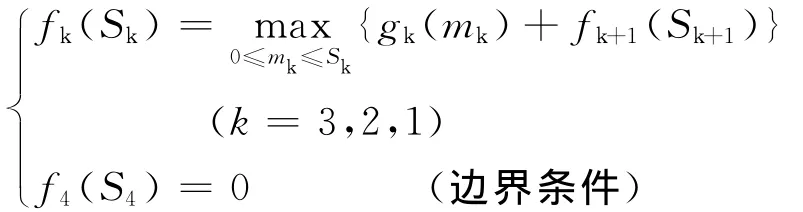
逐阶段求解,便可得到一定投资额情况下,各试验阶段的最佳投资金额和试验次数,f1(m)就是最大效益。根据这些数据制定每个试验阶段的实施方案,统筹安排试验项目,就可以到最优决策的目的。
3 导引头试验数据采集系统设计
导引头不同试验阶段的数据采集既有相同的地方,又各具特点。实验室静态试验和导引头对海试验的数据采集,要求能够全面记录导引头各种工作状态,数据采集通道多、采样率高,通道之间相位误差小;导引头海上挂飞试验的数据采集,要求便携性好,满足振动要求,工作稳定可靠,数据记录时间长。因此,需要针对不同条件下的试验需求研究相应的数据采集设备。
实验室静态试验和导引头对海试验的数据采集设备,主要用于实验室,对设备尺寸和振动性能没有过多要求,可以选择PXI系统作为数采的仪器平台,采用6通道100 MHz数据采集模块采集导引头IQ信号,32通道100 k Hz数据采集模块采集导引头其它电压信号,16通道数字IO模块采集导引头状态信号并对导引头进行复位控制,用磁盘阵列实现较大数据存储容量,系统组成如图1所示。
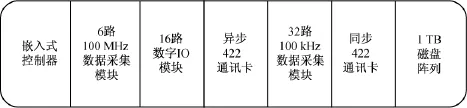
图1 实验室数据采集设备组成框图
导引头海上挂飞试验对数据采集系统要求很高,需要采集记录多路IQ信号、触发信号和几十路状态信号,采集信号量非常多,还要根据飞机舱室位置大小确定设备的结构尺寸,设计减振装置等。因此,单片机系统往往难以胜任,通常只能采取联机处理模式,或者靠其它芯片扩展系统资源来完成系统的监测任务,大大增加了系统的复杂性,使系统的可靠性和稳定性受到影响。而FPGA拥有非常丰富的I/O资源,通常具有上百个I/O端口,可充分满足系统对信号采集量的需求;FPGA的硬件可编程性,使在系统设计过程中,电路设计得到优化,最大限度地减少对硬件电路的改动;FPGA在采集速度上的优势,也是单片机所无法比拟的[2]。因此,接下来以FPGA为逻辑控制核心进行多路数据采集系统的方案设计。
3.1 数据采集系统硬件设计
数据采集设备主要由工控机和数据采集记录器组成,通过USB接口进行数据交互。数据采集记录器可分成4个功能模块(如图2所示),其中FPGA是该系统的核心,主要对调理过的导引头参数进行采集,并将采集到的参数在其内部处理后送给工控机。
(1)主控卡
由USB接口电路、FPGA主控及缓存电路,电源转换模块和全局时钟组成。
主控卡的主要功能:通过USB接口接收工控机传来的各种命令(如读数、擦除等指令),并由FPGA主控电路控制读取其余各卡上存储的数据,通过USB接口发送给工控机。电源转换电路负责将外部数据的+28V电源转换成采集记录器内部需要的电压,并实现电源的输入输出隔离。全局时钟负责给多块高速数采卡提供统一的时钟,使多路模拟信号同时进行采集,以保证信号的相差要求。
(2)低速数采卡
由遥测数据采集电路、信号隔离电路、FPGA控制电路和数据存储电路组成。
低速数采卡的主要功能:负责多路低速遥测信号的隔离、采集与存储,将遥测信号中的控制信号(S1,S2,PWS,T/S,DG,REF,F0~F4)隔离后送入总线背板卡上,供多块高速卡进行逻辑控制。
(3)高速数采卡
由信号隔离电路、数据采集电路、FPGA控制及缓存电路和数据存储电路组成。
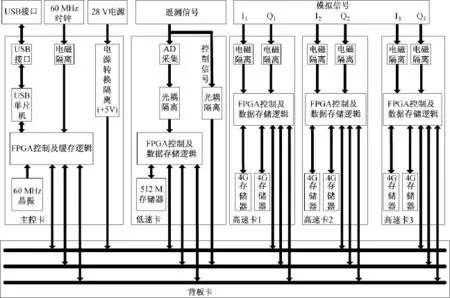
图2 数据采集记录器结构框图
高速数采卡的主要功能:在外部输入控制信号(S1,S2,PWS,T/S,DG)的控制下,实现多路I/Q信号的采集与存储。多块高速数采卡上的AD转换器用主控卡提供的统一时钟进行工作,以满足多路I/Q信号之间的相位要求。采集到的数据在FPGA控制下存入存储器。存储器中的数据最终在主控卡的控制下通过USB接口发送给工控机,供工控机软件分析与处理。
(4)背板卡
背板卡负责各卡的通信和供电。主控卡、低采卡和高速数采卡通过CPCI连接器插到背板卡上,各卡之间通过背板卡上的总线进行通信和供电。总线包括数据总线、控制总线和电源线。
板卡连接方式:各个板卡和背板之间通过CPCI连接器连接。
电源隔离:DC-DC转换器对外部输入的+28V电源进行了隔离。
信号隔离:针对不同的输入信号采取不同的隔离措施。遥测信号通过光耦进行隔离。模拟信号通过隔离变压器进行电磁隔离。
3.2 系统软件总体设计
考虑到操作系统的稳定性、资源占用、程序运行效率等因素,选用Windows XP操作系统。软件开发环境Lab VIEW采用图形化编程,继承了传统编程语言中的结构化和模块化编程的优点,支持多种系统平台,可提供丰富的函数库,支持数据采集板、GPIB设备、串口设备、VXI/PXI仪器,提供CLF模块调用Windows动态连接库和用户自定义的动态连接库中的函数,便于用户利用其它软件平台编译的模块[3],因此选用Lab VIEW软件编程实现系统的控制和管理。
软件主要完成数据采集、存储、分析与波形回调等功能,为便于系统扩展和易于维护,系统软件设计采用模块化思想,主要包括初始化模块、自检模块、通讯模块、通讯接口驱动模块、采集控制模块、数据管理模块和显示模块等。系统软件总体框架如图3所示。由主模块通过调用适当的功能模块,控制系统的初始化,并根据当前的任务状态,控制整个系统软件的流程,完成各项任务。
4 结束语
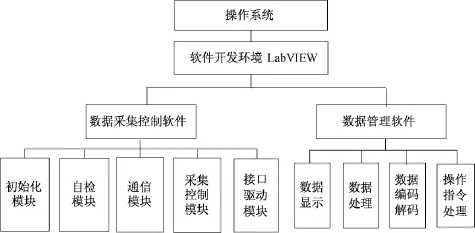
图3 系统软件框架
本文采用动态规划法进行反舰导弹导引头试验阶段的总体设计,将整个导引头试验过程设计成实验室静态试验、导引头对海试验、导引头海上挂飞试验三个阶段,合理控制试验次数,统筹安排试验项目,以达到最优决策的目的,为后续导弹定型试验奠定基础。通过研究导引头各试验阶段数据采集分析方法,以FPGA为逻辑控制核心进行多路数据采集系统的方案设计,充分利用各阶段试验数据对导引头的性能指标进行各个层次、各个方面的考核,加强了导引头试验数据的开发和利用,具有重大的军事与经济效益。
[1] 胡运权.运筹学教程(第二版)[M].北京:清华大学出版社,2003:203.
[2] 李保刚,马登武.FPGA在多路数据采集系统中的应用研究[J].计算机测量与控制,2012,20(4):1138.
[3] 林建荣,吴桂初.Lab VIEW 虚拟仪器与Pasco数据采集系统接口研究[J].浙江传媒学院学报,2006,(2):44.