液压激振技术的研究进展
2012-11-30杨永帅
邢 彤 左 强 杨永帅 阮 健
浙江工业大学特种装备制造与先进加工技术教育部/浙江省重点实验室,杭州,310032
0 引言
由于液压技术具有功率密度大、易于实现冷却和过载保护的优点,所以在传统的低频激振装备中有着不可替代的优势。例如,各种类型的液压振动台被广泛应用于导弹、火箭、卫星等部件的振动环境试验[1],工程材料疲劳试验,行走机械的道路模拟、地震模拟试验[2-3],水坝、高层建筑等大型工程的抗震试验等中[4-6]。工程液压激振设备被广泛应用于凿岩、破碎、夯实、捣固、打桩、钻孔、压力加工、筛分等场合。
液压激振技术按激振方式原理可以分为直流液压激振技术、液压自激振技术、交流液压激振技术、液压射流激振技术和电液伺服激振技术。近年来,国内外学者研制了一些大推力、多缸、多轴、高频的液压激振装备,出现了交流-伺服液压激振技术、电液伺服激振控制技术等[7]。本文对各类液压激振技术的最新发展应用状况进行综述。
1 液压激振技术的研究进展
按激振原理分类,振动台一般可以分为机械式、电动式和液压式三种类型。从三种类型振动台性能对比结果(表1、图1)可以看出,液压激振技术可以获得的振幅和推力最大,在工程振动领域具有较大的优势。液压激振技术在20世纪60年代和70年代发展很快,近年来,由于各类大型试验振动台的需要,液压激振技术又有了新的进展。

表1 各种振动台的比较

图1 三种类型振动台应用区域[8]
1.1 直流液压激振技术
直流液压激振装置具有一般容积式液压传动的基本特点,产生振动的结构简单、使用方便、性能可靠、振动幅值和振动频率改变方便,是目前应用较广泛的液压激振装置。直流液压激振可分为强制配流和自动配流两大类。浙江大学丁凡[9]研制了一种电动阀控制强制配流式液压振动冲击系统,并将其成功地应用在液压剁锉机上,动作准确、稳定,调整方便,效率高。液压冲击振动装备中使用最多的是自动配流式液压振动器,配流装置不是靠外部动力驱动,而是依靠配流装置与振动活塞的反馈关系来驱动的,分为有阀型和无阀型两种方式[7]。无阀型液压冲击机构体积、质量大,冲击能量低,很快便从市场上消失了,有阀型液压冲击机构已占据主导地位。图2所示为双控式液压凿岩机冲击机构,采用前后腔压力交替高低变化的双腔控制方案,瑞典Atlas-Copco公司的Cop1238型及国产的YYG80型液压凿岩机采用了这种控制方案,控制阀的换向频率达50~60Hz。中南大学在液压冲击机构的工作机理研究、设计方法方面处于世界先进水平[10]。
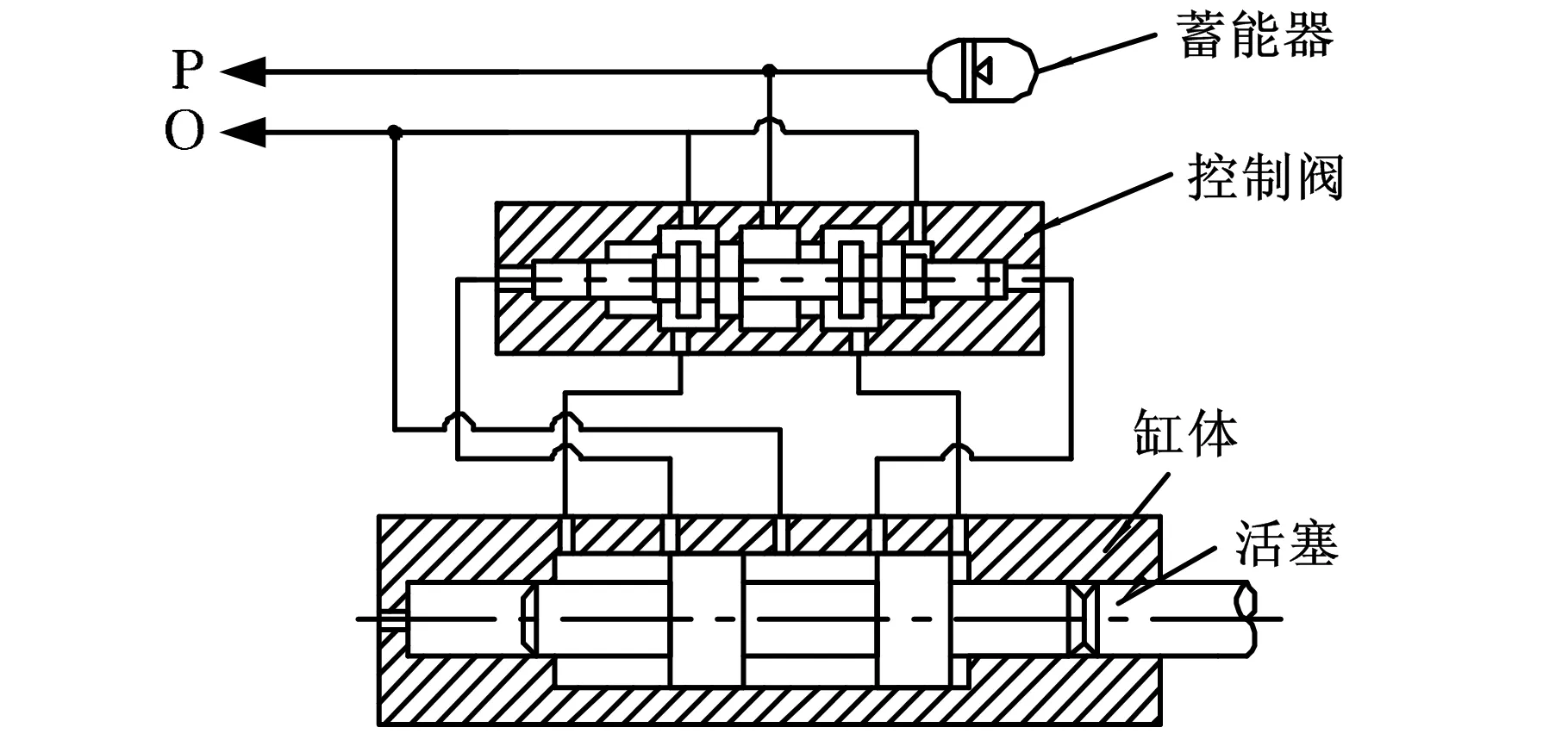
图2 双控式液压冲击器[10]
1.2 交流液压激振技术
交流液压利用液压管道中的液体波动流量或波动压力传递功率或信号,能实现传动同步和振动输出两种功能。交流液压振动机构可做成一次传动机构,特别适用于振动输出,如图3所示的旋转轴配流型振动器即是这种结构;在同时控制多路具有相同运动和速度输出的同步系统时,交流液压振动机构具有元件少、结构简单、动作准确的特点[11];同时交流液压振动机构还具有高频率小振幅或低频率大振幅、功率大以及推力大等优点[12]。这些特点非常适合冶金和矿山机械的工作要求,因而交流液压振动机构可广泛应用于破碎、压实、筛选、运输、钻探、打桩、切料、榨油等各种工程机械领域中[13]。

图3 旋转轴配流型振动器[8]
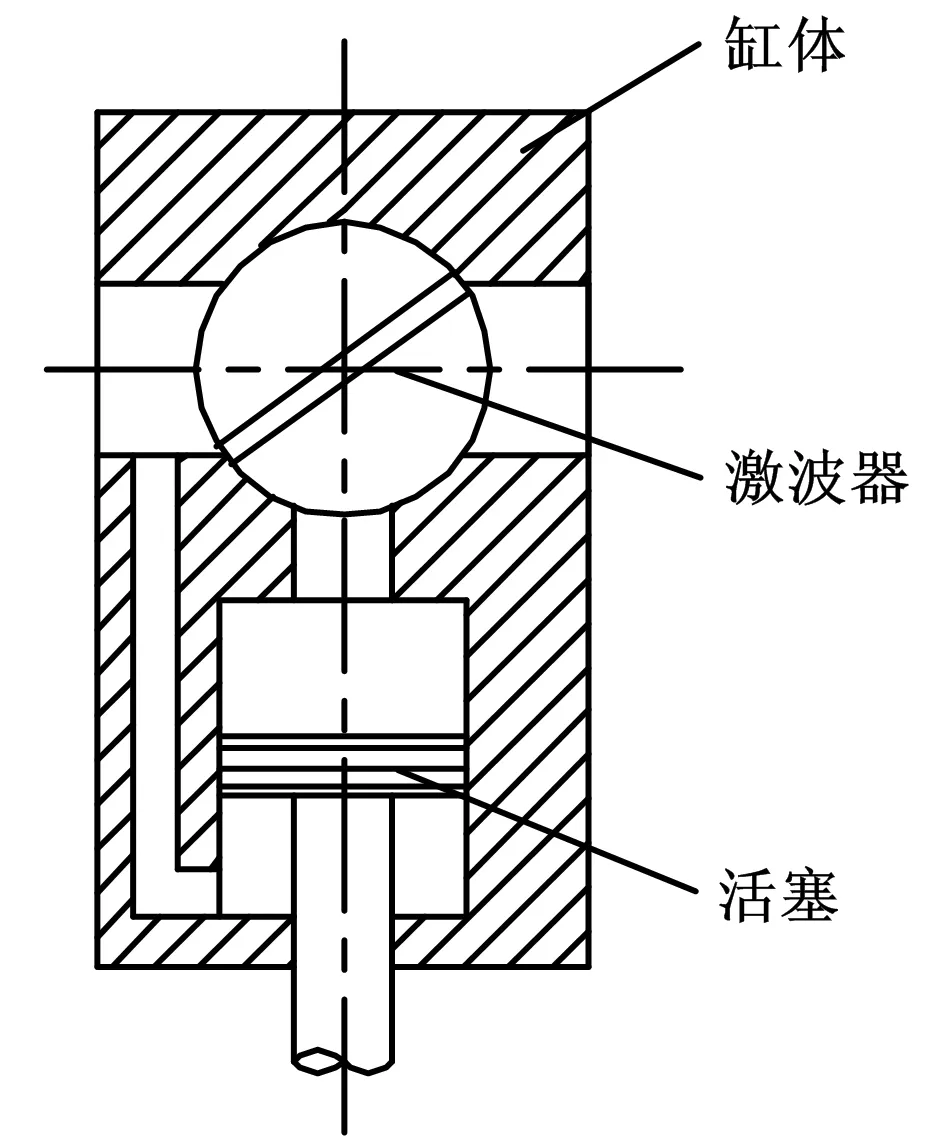
图4 转阀结构的电液激振器
20世纪60年代中期,美国、日本、加拿大、苏联、联邦德国等国家开始探索交流液压理论,开发了交流液压元件,并研制了多种液压振动试验台[14]。1978年,冶金自动化研究所庄凤龄教授[15]分析了交流液压锤原理及其应用并对基本液压元件以及系统的性能作了研究。21世纪初,国内外在竞相研制交流液压系统的同时,加强了对基础理论和可靠性的研究,并不断开拓其应用领域,是交流液压技术发展的又一新阶段[13]。日本学者浦井隆宏等[16]提出了由一个比例螺旋阀和一个高速启闭的螺旋阀控制两个单杆活塞的液压振动系统,研究了其振动频率、振幅的控制方法。2007年,太原理工大学廉红珍等[17]、郝建功等[18]研究了一种转阀结构的电液激振器,如图4所示[19],获得了较高的激振频率(60Hz),但振动幅值调整需要通过调节液压系统压力来实现,控制精度和响应速度不易提高,难以实现偏置控制。2010年,华南理工大学丁问司等[20]推导了交流液压系统主要参数的计算方法,提出管道特性和负载特性决定着单相交流液压系统的振动特性及传动效率的观点。
1.3 液压射流激振技术
液压射流式振荡器利用射流的附壁效应,通过喷嘴出口处的控制流体进行射流切换,输出振荡射流。用射流振荡器作为控制元件能实现高频冲击(3.6Hz左右)。射流冲击器的结构如图5所示,激振频率取决于切换信号频率和射流元件内的分流劈结构。

图5 射流冲击器
由于振荡元件没有阀心、弹簧等易磨损零件,仅由简单通道所组成,所以结构简单、性能良好、不易损坏,成功地应用于超深井钻进中[21]。2002年,西安交通大学吴伟等[22]设计的井下液压激振器使用一个液压双稳射流元件,在套管内油层封隔段积聚能量产生压力振荡。2007年,长江大学熊青山等[23]研制了一种阀式射流冲击器,它与同规格射流冲击器相比,在冲击功及冲击频率方面相差不大,但压耗大幅度降低。
1.4 液压自激振荡技术
液压自激振荡器是应用不平衡液动力来产生自激振荡的—种装置,如图6所示。它比一般机械式振动装备结构简单,耗费功率小,被大量应用于凿岩机和振动筛中。液压自激振荡器的振荡频率调整范围较宽,从几赫兹到几百赫兹,振幅会随振荡时间的延长而增大,可以安装止动销来稳定振幅[7]。
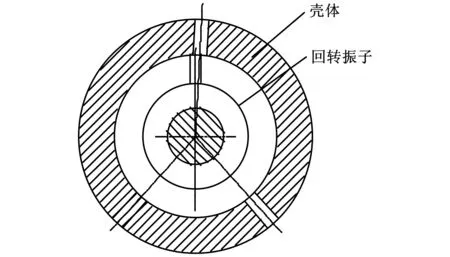
图6 液压自激振荡器
20世纪90年代初,前苏联学者Astashev等[24]提出了一种新结构液压激振器,对液流经过液压自激振动体通道时的动态特性进行了分析。同济大学薛祖德教授[25]研制了一种结构简单的自激式液压振动器,通过仿真和试验研究了产生振动的条件以及振动器的各项参数与振动频率、振幅之间的关系,该振动器被成功地应用在液压起拔道机上。
1.5 电液伺服激振技术
电液伺服激振器利用电液伺服阀控制液压执行元件(液压缸或马达)做往复直线振动或扭转振动,它可以实现随机振动及多个振动缸同步振动[26]。电液伺服激振装备的频响范围取决于伺服阀的频宽,一般采用比例伺服阀或喷嘴挡板伺服阀作为控制元件,其激振频率一般在80Hz以内[27]。MTS公司和密歇根理工大学联合研制的电液高频材料疲劳试验机采用了基于音圈电机的两级电反馈伺服阀[28],大幅度提高了激振器的工作频率,其上限频率高达1000Hz[29]。但由于动圈无法贴壁散热,因而也就限制了频率的进一步提高。
国外的一些著名大学,如美国加州大学Berkeley分校、德国的阿亨大学、日本的东京大学等研究电液伺服振动技术已很多年了,在振动模拟技术研究方面一直处于国际领先水平[30]。1968年,电液伺服激振技术开始在地震模拟振动台中运用。美国伊利诺大学研制了台面尺寸为3.65m×3.65m的地震模拟振动台[31]。我国在1997年研制成功第一台5m×5m三轴六自由度地震模拟振动台,X向和Y向最大加速度为1g,Z向为0.8g;X、Y、Z向最大速度为60cm/s,最大载荷为300kN。2000年,日本防灾科学技术研究所开始研制世界上最大的3自由度地震台,水平两向各有5个激振器,垂直有14个激振器,台体尺寸为20m×15m×5.5m。地震台能承受的最大载荷为12MN,最大水平加速度为0.9g,最大垂直加速度为1.5g,最大速度为200cm/s,最大位移为100cm,频宽为0~30Hz,于2006年1月完成第一次试验,可模拟里氏7.2级地震[5,32-33]。
1.6 电液交流伺服激振技术
2007年,浙江工业大学Ruan等[34]提出一种应用两自由度电液交流转阀(简称2D激振阀)与伺服阀并联控制激振液压缸的方案[35],如图7所示。这种激振器输出的振动频率、幅值和偏置分别由2D激振阀阀芯的转速、阀的开口量和并联伺服阀的开口量控制,大幅度提高了激振频率,最高激振频率已达1250Hz[36],并获得了较好的振动波形。

图7 电液交流伺服激振原理
与电液伺服激振技术相比,电液交流伺服激振技术具有如下特点:①实现高频激振的技术难度小;②没有导控级的功率损失及滞环;③振动波形稳定,阀开口面积幅值只与阀芯的轴向位移有关,而与频率(取决于阀芯转速)无关;④振动频率、幅值及零点位置独立控制,易于实现高精度控制[37-40]。2010年,该方案成功应用于某四轴高频疲劳强度试验系统中,实现在5~200Hz范围内对试验对象进行同步加载,振动频率、幅值连续可控[41]。
2 液压激振控制方法
液压工作介质受环境影响大,因此,电液振动台比电动振动台的控制难度大。早前一般采用模拟加数字混合控制方式以获得较好的性能,近年来更多地采用全数字式控制,一些新控制方法应用在液压激振系统中,提高了振动台的工作频率,改善了高频时的振动波形和稳定性,推动了液压激振技术的发展。
2.1 闭环和半闭环控制
振动的激励信号是通过输入的期望振动信号与振动传感器(位移传感器或加速度传感器)实际测得的振动信号进行比较,并通过振动控制算法而获得的。比较的方式有逐点实时比较[42]和只对特征值(如幅值、相位和零点位置等)[43]进行比较两种,前者为振动控制的闭环模式,主要应用于液压机构的固有频率相对于电液伺服阀频宽较小的低频振动系统,后者为半闭环模式,适用于各种用高低频的电液控制系统。
对于闭环模式,提高激振频率一般通过三状态反馈和极点配置的方法,抑制或消除液压谐振,进而拓宽电液伺服系统的频宽,其效果取决于伺服阀频响特性及通流能力[44]。针对传统三状态控制策略不能解决的跟踪精度低、鲁棒性差的问题,哈尔滨工业大学赵勇等[45]基于FEL思想设计了幅相控制器,该设备具有跟踪精度高、结构简单、运算量小的特点,能够满足对实时性要求很高的液压振动台控制系统的要求。
2.2 非线性补偿控制
国际上几家著名的电液振动台生产研究单位主要采用三参量控制和前馈补偿的复合控制方法[5,46]以及PID控制和前馈补偿的复合控制方法。这些控制方法都是建立在线性数学模型的基础上,而电液振动台是一个具有较强非线性的系统,为了补偿非线性干扰,近年来国内外学者进行了大量的探索性研究,有代表性的研究成果有:Dozono等[47]、Dai等[48]提出的利用非线性作用力的实时补偿技术来改进系统的跟踪性能;美国海军研究生院Karpenko和加拿大曼尼托巴大学Sepehri共同提出了将定量反馈理论应用于液压激振器位置控制,更好地排除了外在的干扰[49];Nakkarat等[50]提出了一种基于观测器的反推力非线性控制器,以控制单出杆电液激振器,实验结果证明,此控制器的跟踪控制精度比P控制器和PI控制器的控制精度都高。
浙江大学的Guan等[51]提出一种自适应滑模液压激振器控制方法,补偿线性不确定参数,特别是由原始控制体引起的各种非线性不确定参数。长安大学赵铁栓等[52]提出了将神经网络自适应补偿器与PID控制器并联的控制策略,补偿系统参数摄动、非线性和外界扰动对系统控制性能的影响,提高了系统的响应速度和控制精度,实现了智能控制电液无级调幅系统。燕山大学孙俊磊等[53]提出用李雅普诺夫稳定性理论设计基于广义误差的模型参考自适应控制方法。根据被控对象或可调系统的输入量和输出量来设计自适应系统,保证了系统的稳定性,且参数受扰后可在大范围变化。
2.3 多轴振动控制
多轴振动试验台的各自由度之间存在交叉耦合,即使采用了各振动方向相互独立的机械解耦装置,交叉耦合效应仍不能忽略,这主要是由于试件动力反馈效应作用的结果,当控制点选择在试件上时,交叉耦合更为明显。
对于电液振动台参数的相互耦合关系,Smallwood[54]、Vaes等[55]提出采用系统的频响函数矩阵进行交叉耦合补偿和驱动信号修正以补偿交叉耦合,实现解耦控制。STI和Wyle公司采用基于频域迭代与修正的控制算法,减小频率和幅值的相互耦合影响,提高控制精度[56]。哈尔滨工业大学沈刚等[57]提出采用压力镇定控制器削弱系统中各激振器间的内力耦合,减小能量内耗,但压力镇定控制器对振动台系统加速度性能指标影响较大。关广丰等[58]提出在6自由度控制回路中增设两路“扭曲”控制回路,基于扭曲控制策略对传统压力镇定控制器进行改进。试验结果表明,该方法能够明显改善振动台系统低频段的加速度均匀度和横向分量指标,改进后的压力镇定控制器能够有效削弱系统中各液压缸之间的内力。哈尔滨工业大学杨宇等[59]提出了基于动力学的Stewart平台振动控制策略,实验证明,该方法能够有效地抑制大负载、高质心条件下所造成的耦合运动,使得振动控制精度大幅度提高。
近年来,国外功能较为完善的多轴振动控制系统已具有多轴随机振动、多轴正弦扫描振动、多轴瞬态振动、多轴时间历程复现以及多轴随机加正弦、多轴随机加随机等各种振动控制功能,其控制精度可以达到目前商品化的单轴振动控制系统的水平,能够满足多轴振动试验环境的要求[60-62]。我国浙江大学开发的基于双DSP的实时振动试验系统,仅能完成冲击、正弦、随机试验。国内的电液振动试验台基本上是引进国外振动控制系统的[63]。
3 总结
图8示出了六种类型液压激振技术典型实例的响应频率f和工作行程L之间关系,其研究者如下:1-丁凡等,2-薛祖德等,3-陈家旺等,4-刘绍华,5-MTS公司,6-阮健等。从图8可以看出,电液伺服激振技术适合于高频响小振幅场合,新出现的电液交流伺服激振技术为数千赫兹的超高频液压激振技术的发展提供了可能,高频液压激振技术方兴未艾。

图8 六种类型液压激振技术的性能比较
多缸、多轴的液压振动装备及其控制技术是近年来的研究热点,我国的研究工作取得了长足的进步,已经接近国际水平。
[1] 张巧寿.振动试验系统现状与发展[J].航天技术与民品,2000(8):67-69.
[2] 杨云,沈毅力,曹阳,等.道路模拟振动台及其控制系统的研制[J].系统仿真学报,2003,16(5):39-41.
[3] de Coninck F, Densmet W, Sas P. Increasing the Accuracy of MDOF Road Reproduction Experiments: Calibration, Tuning and a Modified TWR Appoach[C]//Proceedings of the 2004 International Conference on Modal Analysis Noise and Vibration Engineering.Leuven,Belgium,2004:709-721.
[4] 王燕华,程文瀼,陆飞,等.地震模拟振动台的发展[J].工程抗震与加固改造,2007, 29(5): 53-56,67.
[5] Nobuyuki O, Keiichi O, Tsuneo K,et al. Construction of a Three-dimensional, Large-scale Shaking Table and Development of Core Technology[J].Philosophical Transactions of the Royal Society a: Mathematical, Physical and Engineering Sciences, 2001, 359(10):1725-1751.
[6] 王进延,金峰,张楚汉.结构抗震试验方法的发展[J].地震工程与工程振动, 2005, 25(4): 37-43.
[7] Yonekawa M, Ishii T, Ohmi M, et al. Development of a Remote-controlled Fatigue Test Machine Using a Laser Extensometer for Investigation of Irradiation Effect on Fatigue Properties[J].Journal of Nuclear Materials, 2002,307/311(2):1613-1618.
[8] 朱文华.液压振动技术[M].福州: 福建科学出版社, 1984.
[9] 丁凡.电液振动冲击系统在剁锉机上的应用[J].中国机械工程,1999, 10(8): 866-868.
[10] 何清华.液压冲击机构研究·设计[M].长沙:中南大学出版社, 2009.
[11] 李蓉,刘混举.交流液压冲击系统测试方案设计[J].机械工程与自动化,2007(2):103-105.
[12] 姚成玉,赵静一.交流液压同步特性及振动输出传动效率分析[J].液压与气动,2005(8):34-35.
[13] 赵静一,王巍,姚成玉,等.交流液压技术的研究现状及展望[J].中国工程机械学报,2003,1(1): 112-116.
[14] 刘绍华,郁杰.国外交流液压技术的发展[J].建筑机械,1990(4):20-27.
[15] 庄凤龄.交流液压的原理及应用[J].机床与液压,1978(5): 1-9.
[16] 浦井隆宏,杉山高洋.日本ム4グにおける水圧サ4ボ弁及びアクチュエ4タ開発[J] . フルイドバワ-システム,1998,29(7): 634-637.
[17] 廉红珍,寇子明.振动机械液压激振方式的特点分析和发展综述[J].煤矿机械,2007, 27(11):12-14.
[18] 郝建功,张耀成.新型电液激振装置的性能研究[J].太原理工大学学报, 2003, 34(6): 706-709.
[19] 于宝成,许步勤,冯海星.激波式液压激振器的设计与应用[J].液压与气动,2001(6): 10-12.
[20] 丁问司,巫辉燕,陈丽娜,等.单相交流液压系统设计及特性分析[J].中南大学学报(自然科学版),2010,41(4): 1348-1353.
[21] 陈家旺.射流式液动冲击器仿真计算与实验研究[D].长春:吉林大学,2007.
[22] 吴伟,秦彦斌,高纪念.井下液压激振器的设计与仿真[J].石油矿场机械,2002, 31(4): 6-9.
[23] 熊青山,王越之,殷琨,等.阀式液动射流冲击器的研制[J].石油钻探技术,2007, 35(3): 63-65.
[24] Astashev V K, Tresvyatskij A N. Hydraulic Self-sustained Vibrations Exciter for Vibrating Technological Devices[J]. Problemy Prochnostii Nadezhnos'ti Mashin,1993, 6: 52-59.
[25] 薛祖德,何建国,萧子渊.一种液压振动器的研究[J].上海第二工业大学学报,1989(1): 22-25.
[26] Merritt E H. Hydraulic Control Systems[M]. New York: John Wiley & Sons, 1967.
[27] 贾文昂,阮健,李胜,等.电液四轴高频结构强度疲劳试验系统[J].振动与冲击,2010,29(5): 86-90.
[28] Morgan J M, Milligan W W. A 1kHz Servo Hydraulic Fatigue Testing System[C]//Proceedings of the Conference “High Cycle Fatigue of Structural Materials”.Warren Dale, 1997: 305-312.
[29] MTS. 1000Hz High-Cycle Fatigue Test System[EB/OL].http://www.mts.com/stellent/groups/public/documents/library/dev_002041.pdf, 2001.
[30] Naaman A E, Jeong S M. Structural Ductility of Concrete Beams Prestressed with FRP Tendons[J].Proceedings of the Second International RILEM Symposium(FRPRCS-2),1995,29:379-401.
[31] 王燕华,程文滚,陆飞,等.地震模拟振动台的发展[J].工程抗震与加固改造,2005,29(5):53-56.
[32] Williams M.Dynamic Testing of Structures[J] . SECED Newsletter, the Society for Earthquake and Civil Engineering Dynamics, 2001, 15(3): 5-10.
[33] Ogawa N, Ohtani K, Nakamura I, et al. Development of Core Technology for 3-d 1200 Tonne Large Shaking Table[C]//12th World Conference on Earthquake Engineering . Auckland, New Zealand,2000: 2156.
[34] Ruan J, Burton R,Ukrainetz P.An Investigation Into the Characteristic of a Two Dimensional “2D” Flow Control Valve[J].ASME, Journal of Dynamic Systems Measurement and Control,2002,124: 214-220.
[35] Ruan J, Burton R T. An Electrohydraulic Vibration Exciter Using a Two-dimensional Valve[J]. Proceeding of the Institution of Mechanical Engineers Part I-Journal of Systems and Control Engineering, 2009,223(12): 135-147.
[36] 程辉,俞浙青,阮健,等. 新型电液激振试验台的高频特性研究[J]. 液压与气动, 2010(6):28-31.
[37] 阮健,李胜,裴翔,等. 2D阀控电液激振器[J].机械工程学报, 2009,45(11): 125-131.
[38] 阮健,李胜,裴翔,等.电液激振器控制阀:中国,200710160253.5[P]. 2008-05-21.
[39] Ruan J, Burton R, Ukrainetz P.An Investigation Into the Characteristic of a Two Dimensional “2D” Flow Control Valve[J].ASME, Journal of Dynamic Systems Measurement and Control,2002,124: 214-220.
[40] Ruan J, Burton R, Ukrainetz P, et al. Two-dimensional Pressure Control Valve[J]. Journal of Mechanical Engineering Science, 2001, 215(9): 1031-1038.
[41] 贾文昂,阮健,李胜,等.电液四轴高频疲劳强度试验系统研究研究[J].兵工学报,2010,31(6): 770-776.
[42] Kaddissi C, Kenné J P,Saad M. Identification and Real-time Control of an Electrohydraulic Servo System Based on Nonlinear Backstepping[J]. IEEE/ASME Transections on Mechatronics, 2007, 12(1): 12-22.
[43] Gustavo P R, Ronaldo S D, Guilherme A G. Primary Accelerometer Calibration Problems Due to Vibration Exciters[J]. Measurement, 2009,42: 1363-1369.
[44] 李洪人. 液压控制系统[M].北京:国防工业出版社, 1990.
[45] 赵勇,丛大成,韩俊伟.基于FEL的液压振动台加速度幅相控制[J]. 沈阳建筑大学学报(自然科学版),2008,24(5):915-919.
[46] Conte J P, Prombetti T L. Linear Dynamic Modeling of a Uni-axial Servo-hydraulic Shaking Table System[J].Earthquake Engineering and Structural Dynamics, 2000, 29(9): 1175-1404.
[47] Dozono Y, Horiuchi T, Katsnmata H, et al. Shaking-table Control by Real-time Compensation of the Reaction Force Caused by a Nonlinear Specimen[J] . Transactions of the ASME, 2004,126: 122-127.
[48] Dai Hongliang,Sain M K,Spencer B F. Using Tensors to Track Earthquakes on Hydraulic Shaker Tables[C]//Proceeding of the American Control Conference.Albuquerque,N M,1997: 1-5.
[49] Karpenko M,Sepehri N. On Quantitative Feedback Design for Robust Position Control of Hydraulic Actuators[J]. Control Engineering Practice, 2010,18: 289-299.
[50] Nakkarat P, Kuntanapreeda S. Observer-based Backstepping Force Control of an Electrohydraulic Actuator[J]. Control Engineering Practice,2009,17:895-902.
[51] Guan Cheng, Pan Shuangxia. Adaptive Sliding Mode Control of Electro-hydraulic System with Nonlinear Unknown Parameters[J]. Control Engineering Practice,2008,16(11):1275-1284.
[52] 赵铁栓,焦生杰.振动压路机电液无级调幅控制研究[J].中国公路学报,2010,23(2): 116-121.
[53] 孙俊磊,高英杰,管晴晴.高频电液振动台的模型参考自适应控制的研究[J].液压与气动,2008(10): 24-26.
[54] Smallwood D O. Multiple Shaker Random Vibration Control an Update,SAND 98-2044C[R].Albuquerque:Sandia National Laboratories,1999.
[55] Vaes D, Souverijins W, de Cuyper J, et al. Optimal Decoupling for Improved Multivariable Controller Design, Applied on an Automotive Vibration Test Rig[C]//Proceedings of the American Control Conference.Denver,USA, 2003: 785-790.
[56] Stroud R C, Hamma G A, Underwood M A, et al. A Review of Multiaxis/Multiexciter Vibration Technology[J]. Sound and Vibration,1996, 30(4):20-27.
[57] 沈刚,黄其涛,何景峰,等.DSP快速原型控制的道路模拟振动台控制系[J].农业机械学报,2009, 40(6):37-42.
[58] 关广丰,熊伟,王海涛,等.6自由度电液振动台控制策略研究[J].振动与冲击,2010, 29(4): 200-203,221.
[59] 杨宇,郑淑涛,韩俊伟.基于动力学的Stewart平台振动控制策略研究[J].农业机械学报,2010,41(6): 20-24.
[60] Stroud R C, Hamma G A. Multiexciter and Multiaxis Vibration Exciter Control System[J]. Sound and Vibration,1988,22(4):18-21,24-28.
[61] Newton J D.Methods of Control of Multiple Shake Testing System[J].Shock and Vibration Bulletin,1994,35(2):85-96.
[62] Fletcher J N, Vold H, Hansem M D. Enchanced Multiaxis Vibration Control of Service Simulation Testing[J]. Sound and Vibration, 1995,29(4):22.
[63] 陈章卫,于慧君.振动控制技术现状与进展[J]. 振动与冲击,2009, 28(3): 73-77.
