舰船气泡尾流特性的数值模拟和实验研究
2012-09-22陈圣涛王慧丽王运鹰张毓芬刘焕英
陈圣涛,王慧丽,王运鹰,张毓芬,齐 异,刘焕英
(水下测控技术国防科技重点实验室,辽宁 大连 116013)
1 引 言
水面舰船在航行的过程中,由于螺旋桨空化的作用以及船体对波浪的破碎等原因,在舰船两侧和后方中产生大量的气泡,形成一条富含气泡的尾流。舰船尾流中气泡对尾流特性的研究起着重要的作用。利用尾流的物理特性来探测尾流,尾流中气泡的含量及分布是探测尾流的基础。研究人员采用从声学到光学等不同手段来测量和研究尾流中的气泡[1-5]。
从二十世纪四十年代开始,美国就开展了舰船尾流特性的研究。最早Davis(1955)[6]用几何方法研究了气泡的光散射特性。二战以来,舰船表面气泡两相流研究受到关注,研究者发现,气泡尾流的产生强烈依赖于船体区域附近的两相流。通过舰船表面气泡两相流和气泡的分解、聚合模型,Carrica[7]具体计算了在舰船表面气泡的产生,给出了FF-1052海军护卫舰(舰长126.7m,速度27kns)近场尾流中不同位置的气泡数密度、气泡的体积比等数据。Zhang(1998)[8]应用Mie理论计算了干净气泡和脏气泡的光学特性,并且研究了自然水域内气泡群的体散射函数,在实验室中实现了对其的测量[9]。他们还对舰船尾流在遥感中的光学影响进行了探讨[10]。Zhang的研究表明无论是破碎波注入的气泡还是舰船尾流产生的气泡对海洋中的光散射都有着显著影响,尤其是能增强光在海水中的后向散射。
近年来,随着相关流体力学计算硬件和软件的发展,不少研究者尝试用数值的方法研究舰船尾流。Smirnov[11]等利用拉格郎日动力学(LPD)的方法,对水面舰船的气泡尾流进行了模拟。Katza[12]利用美国海军计算尾流的源代码“TBWAKE”,对其改动后,模拟了舰船近场(小于30倍船长)固体粒子和液体等污染源的扩散过程。虽然他没有计算尾流中气泡的运动,但其结果仍然对舰船尾流的研究有一定的借鉴意义。
针对舰船尾流中气泡生成机理和气泡运动的分析,国内外研究人员的研究重点和方向并不一样。目前对于舰船尾流的研究,一般容易遇到计算资源的瓶颈。比如,尾流中气泡数密度最大可达1010/m3,在目前的计算条件下详细模拟尾流中气泡的运动是不可能的;此外,对引起气泡产生的各种耦合因素的综合研究不多。螺旋桨的旋转引起静压的降低是空化的主要原因,而国内外的研究人员在研究舰船运动时往往忽略螺旋桨的影响或者仅仅研究无桨船。鉴于此,本文以双桨船某实船为模型,耦合螺旋桨旋转的因素,以尾流中的气体含量为主要物理量而不关注具体的数密度分布,基于N-S方程,同时求解两相流的相关方程,研究从近场到远场气泡尾流的相关特性。
2 物理模型
2.1 控制方程
连续性方程

动量方程

能量方程

湍流动能方程

湍流耗散率方程

计算中气泡的产生,用到气液两相,分别定义气相和液相为p,q。
q相的体积Vq定义为:
式中 μq,λq是 q 相的剪切和体积粘度是外部体积力是升力是虚拟质量力是相之间的相互作用力,p是所有相共享的压力。是相间的速度,定义如下。如果(也就是,相p的质量传递到相 q)如果(也就是,相 q 的质量传递到相 p);和
本文使用下面形式的相互作用项:

其中Kpq(=Kqp)是相间动量交换系数。
体积分数方程
体积分数方程从混合(m)的连续性方程获得。经过处理后,假定不可压缩的液体(l),可以获得下面的表达式:

本文模拟海水空化过程,忽略蒸发潜热。Rayleigh-Plesset方程与压力和气泡容积φ相关:

其中pB表示气泡内的压力,由蒸汽的部分压力(pv)和非凝结气体的部分压力(p)之和来描绘,σ是表面张力系数。
为了简化计算,本文假设气泡成长和破裂的过程由下式给出:

2.2 几何模型及网格划分
建模采用某舰船实船,船长86.9 m,设计水线长78 m,型宽14.6 m,型深6.8m,设计吃水3.6 m。双桨驱动,螺旋桨直径2.44 m,0.7R处螺距比1.053,毂径比0.199,五叶桨。最高航速12 kns,螺旋桨最高转速200 rpm。按照最高航速计算,取船后5分钟航行的距离,1800 m。尾流深度一般为吃水深的2倍左右,考虑到气泡在螺旋桨作用下的运动,本模型中取的计算水深为9 m。远场宽度400 m。
网格划分采用四面体与六面体结合的非结构化网格,网格总数约为180万。由于求解方程较多,并且计算的是实船模型,尺度较大,迭代速度较慢,需要较高的计算资源。本文数值计算在曙光4000A系列机群上进行,计算峰值速度为1280亿次。计算一个完整算例约需3400 CPU.Hour。
边界条件设置如下:
速度入口:舰船艏部向前一倍船长处,采用速度入口。
自由出口:舰船艉部向后1800 m处,设定相对于参考压力点的流体静压值。
壁面边界:潜艇外表面,设定为无滑移条件,即u=v=w=0;对于螺旋桨,设定为滑移边界,设定旋转角速度。
对称面:垂直于对称面的速度分量为零,vn=0;平行于对称面的速度分量法向导数为零。
采用有限体积法离散控制方程和湍流模式。动量方程、湍流动能方程以及耗散率方程采用二阶迎风格式,压力项采用二阶差分格式。非稳态项采用一阶隐式求解。压力速度耦合迭代采用Simple算法。
3 结果与讨论
3.1 螺旋桨的空化现象
在温度不变的情况下,若液体中某处的压力降到或低于某一临界压力,液体内部原来含有的很小的气泡将迅速膨胀,则该处会产生可见的含有蒸汽和其它气体的微小空泡。液体流经的局部地区,压力若低于某临界值,液体也会发生空化。在低压区空化的液体挟带着大量空泡形成了“两相流”运动,因而破坏了液体宏观上的连续性,水流挟带着的空泡在流经下游压力较高的区域时,空泡将发生溃灭。因此空化现象包括空泡的发生、成长和溃灭,它是一个非恒定过程。舰船的螺旋桨由于高速旋转,会产生低压甚至负压区,并且由于海水中含有一定的气体,因此会产生空化现象。由于空化产生的气泡是微米甚至纳米的尺度,数量可达1010/m3,现有的计算条件不足以模拟实船尾流空化的详细过程,本文用海水中气体的含量来表示螺旋桨空化的过程。图1表示的是螺旋桨表面的压力分布情况,从图中可以看出表面上有明显的低压区和负压区,导致产生空化现象。
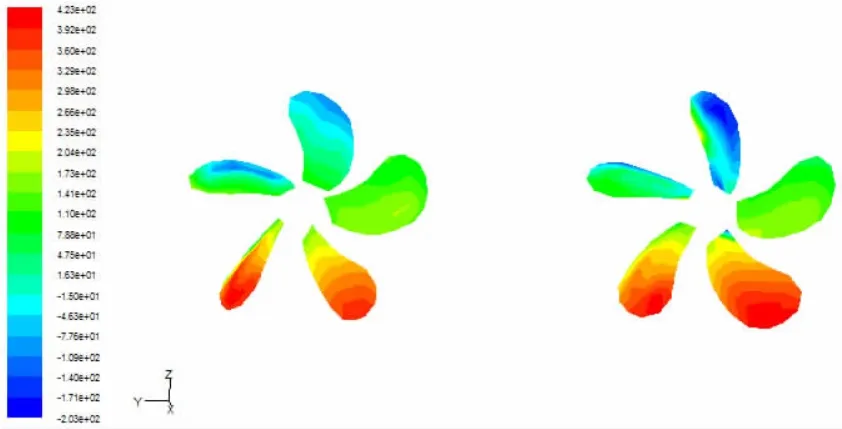
图1 螺旋桨表面压力分布Fig.1 Pressure distribution of the propellers

图2 不同水深含气量的变化情况Fig.2 Volume fraction for the different depths
螺旋桨在旋转运动时,其周向速度有竖直方向上的分量,会引起海水在竖直方向上的运动,同时必然会携带气泡上下运动。图2为不同水深的气体含量分布曲线,横坐标为距离船尾部的不同长度,其中螺旋桨平面位于水面下1.8 m处。在不同深度下,海水中含气量沿前进方向表现为相同的规律,在距离螺旋桨较近处气体含量减少的速度要大于较远处气体含量的减少速度,这跟螺旋桨引起的湍流耗散较快有关。

图3 螺旋桨产生的空化气泡尾流Fig.3 Cavitation bubble wake of the propellers
图3表示螺旋桨旋转产生空化后,海水中的气体含量的后视图。截面取自某水面船航行5分钟后桨后10 m处的位置。
研究发现,螺旋桨转速会影响空化气泡尾流的距离,但转速并不是其决定性的因素。在螺旋桨表面的气体含量要比桨后10 m处的气体含量高大约一个数量级。在不同的工况下(航行时间和螺旋桨转速),因为空化而产生的气泡群在螺旋桨后聚集的距离一般不超过20 m,大于这个距离后,螺旋桨后的气体含量跟整个尾流区的气体含量差别不会很大。气泡的产生过程,是小气泡聚集-长大-溃灭的过程,并且在螺旋桨引起的强烈湍流作用下,气体会较快地向周围海水扩散。
3.2 尾流的空间特性
舰船尾流区一般可以分为近场扩散区和远场尾流区。根据前人的研究,一般取1-1.5倍船长作为近场扩散区。在本文中,把船后略大于一倍船长的距离,100 m左右作为近场扩散区,大于100 m的距离作为远场尾流区。图4表示的是近场扩散区的气泡尾流的变化特性。图5表示远场尾流区较长时间后的空间特性。
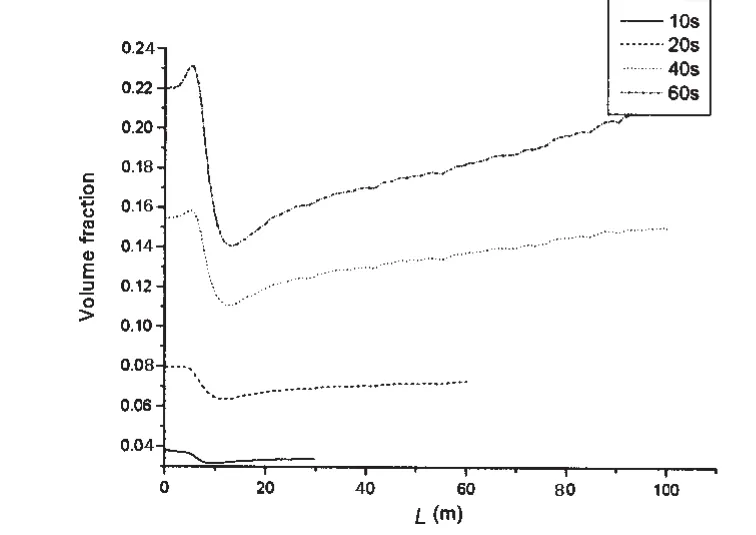
图4 近场扩散区的空间特性Fig.4 Space character of the near field

图5 远场尾流区的空间特征Fig.5 Space character of the wake’s far field
水面舰以6 kns的航速航行。总体看来,在靠近螺旋桨的区域,含气量是一个快速下降的过程。图中表示的曲线是沿螺旋桨轴线方向。快速下降的原因主要有以下两方面:(1)螺旋桨空化产生气泡后,由于海水随螺旋桨同时高速旋转,小气泡由于浮升速度较慢,跟随海水运动到较远区域;(2)较大的气泡浮升作用较明显。这两方面的原因导致桨后海水含气量有一明显的下降过程。在稍远一些的区域,30~100 m处,含气量则是上升的过程,特别是时间越长,含气量上升越明显。这个过程反映了气泡的聚集长大的过程。在较远的区域,由于螺旋桨引起的海水湍流影响不再那么明显,尾流中的气泡群处于相对比较“稳定”的状态,此时由于没有螺旋桨的继续空化作用,含气量随时间的增加,反映气泡的变大和浮升的过程。
在船后大于100 m的远场尾流区,海水中的气体含量随距离的增加不断减少,随时间也不断减少。这体现了尾流区中气泡破裂-消散的过程。由图中可以看出,1000 m后尾流中的含气量仅占螺旋桨后含气量的0.1左右。
3.3 尾流的时间特性
图6为距离船尾100 m处,近场尾流区海水中含气量的时间特性。图7为距离船尾700 m处,海水中含气量的时间特性。
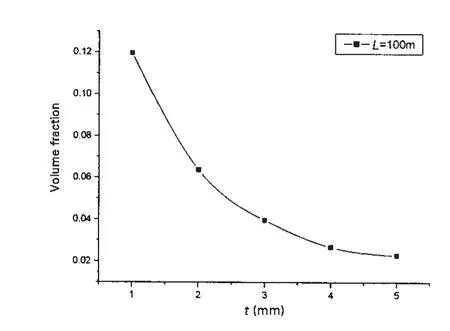
图6 近场尾流海水含气量的时间特性Fig.6 Time character of the near field wake
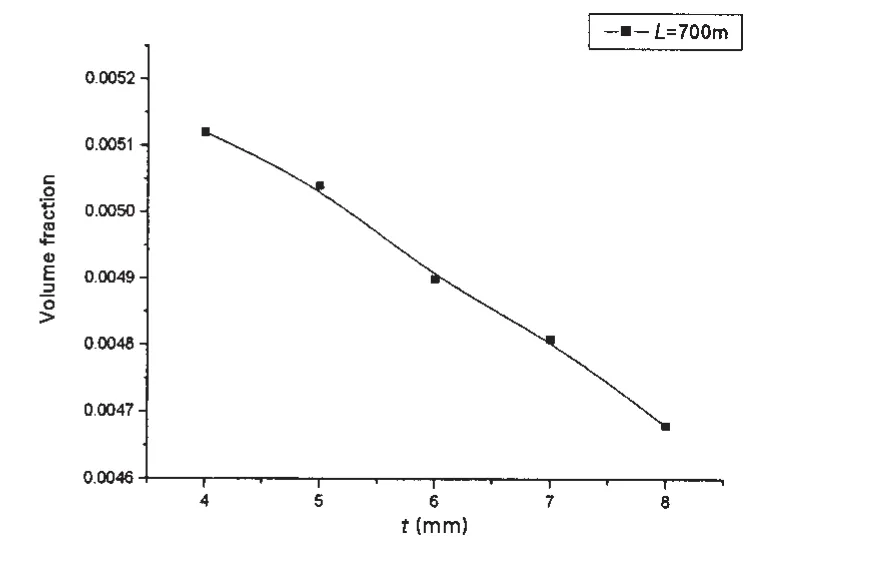
图7 远场尾流海水含气量的时间特性Fig.7 Time character of the far field wake
气泡尾流产生后,在经过了气泡聚集、浮升等过程后,气泡尾流呈现衰减的过程。针对尾流区域中气泡的衰减规律,国内外不同研究者进行了不同的理论与实验研究,得出的结论也不尽相同。
本文的研究结果表明,在当前的航速、螺旋桨转速等条件下,在5分钟之前的尾流区域,尾流海水中的含气量基本以乘幂格式衰减比较合理,而在5分钟之后的远场尾流区,则与指数衰减格式符合得较好。在不同的航行条件下仍表现为相似的分布规律。拟合结果比较如图8所示,实线为计算值,虚线为分别用指数格式和乘幂格式拟合的结果。
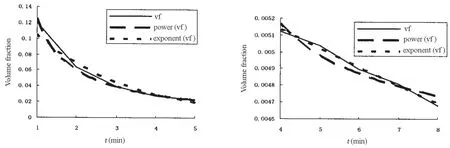
图8 拟合结果比较Fig.8 Comparision of the fitting results
综上所述,尾流中气体的衰减规律,可以用以下的公式来表述:

在本文中,a=0.9941,a0=0.1242,b0=0.9926,b=-0.0053,k=1.0606,t0=45.6。
4 舰船尾流的实验室模拟
实验室模拟舰船气泡尾流的原理和系统过程如图9所示。用钼丝极化水产生的气泡模拟舰船气泡尾流。近场扩散区和远场尾流区中不同的气体含量用不同的极化电压来控制。由激光器主动发射脉冲激光,利用接收光学装置和光电探测器接收通过模拟尾流的光信号,通过分析接收到的能量信号来研究气泡尾流的衰减规律。

图9 实验原理示意图Fig.9 Sketch of the experimental principle
实验用极化产生气泡的不同密度来模拟近场尾流区和远场尾流区。气泡的密度通过极化电压来控制。图10为实验室模拟的近场尾流区信号,极化电压为40V,图11为模拟的远场尾流区信号,极化电压为20V。E0代表无量纲化后的激光能量。
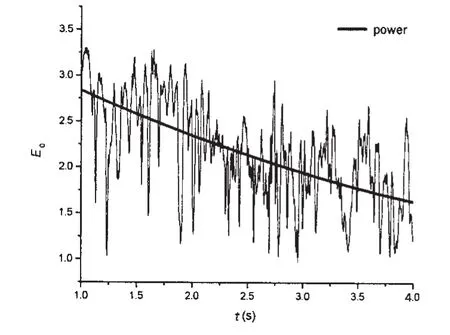
图10 模拟近场尾流区信号Fig.10 Simulation signal of the near field wake

图11 模拟远场尾流区信号Fig.11 Simulation signal of the far field wake
由于极化产生的气体在实验室中会较快地消散,因此实验模拟的气泡尾流存活时间较实船尾流短。通过对所采集的激光信号分析和极化产生的气泡的衰减规律可以看出,近场尾流区模拟信号与乘幂衰减的格式符合较好,而远场尾流区的模拟信号与指数衰减格式符合较好,这也与本文得到的公式(11)的结论一致。
5 结 论
本文基于N-S方程和两相流模型,研究了双浆船后气泡尾流的空间特性、时间特性以及气泡的衰减规律,主要结论如下:
(1)由于螺旋桨旋转引起的空化作用,靠近螺旋桨区域会产生较多的气体,在螺旋桨引起的强烈湍流作用下,气体会较快地向周围海水扩散。不同水深的气体含量衰减速度不一样。
(2)在尾流近场扩散区中靠近螺旋桨的区域,海水含气量有一个快速下降的过程。相对较远的区域,含气量随时间的增加,反映了气泡的变大和浮升的过程。远场尾流区气体含量的衰减体现了尾流区中气泡破裂-消散的过程。
(3)近场尾流区中海水含气量基本以乘幂格式衰减,而在远场尾流区,则与指数衰减格式符合的较好。实验结果也较好地证明了此结论。
[1]Leifer I,de Leeuw G,Cohen L H.Optical measurement of bubbles:System design and application[J].Journal of Atmospheric and Ocean Technology,2003,20(9):1317-1332.
[2]Wu M,Gharib M.Experimental studies on the shape and path of small air bubbles rising in clean water[J].Physics of Fluids,2002,14(7):49-52.
[3]Ford B,Loth E.Ellipsoidal bubble diffusion in a turbulent share layer[J].J Multiphase Flow,2000,26:503-516.
[4]Krekova M M,Krekov G M,Shamanaev V S.Specific features of lidar returns in airborne sensing of seawater containing air bubbles[J].Russian Physics Journal,2003,46(11):1086-1091.
[5]Trevorrow M V.Boundary scattering limitations to fish detection in shallowwaters[J].Fisheries Research,1998,35:127-135.
[6]Davis G E.Scattering of light by an air bubble in water[J].J Opt.Soc.Am.,1955,45(7):572-581.
[7]Carrica P M,Drew D,Bonettor F,et al.Polydisperse model for bubbly two phases flow around a surface ship[J].International Journal of Multiphase Flow,1999,25:257-305.
[8]Zhang X,Lewis M R,Jonhson B D.Influence of bubbles on scattering of light in the ocean[J].Appl.Opt,1988,37:6525-6236.
[9]Zhang X,Lewis M.The volume scattering function of natural bubble populations[J].Limnol Oceanogr.,2002,47(5):1273-1282.
[10]Zhang X,Lewis M,Bissett W P,Johnson B,Kohler D.Optical influence of ship wakes[J].Appl.Oppl.Opt.,2004,43(15):3122-3132.
[11]Smirnov A,Celik I,Shi S.LES of bubble dynamics in wake flows[J].Computers&Fluids,2005,34:351-373.
[12]Katza C N,Chadwicka D B,Rohra J,Hymanb M,Ondercin D.Field measurements and modeling of dilution in the wake of a US navy frigate[J].Marine Pollution Bulletin,2003,46:991-1005.
