大型复杂结构振动特性分析方法研究
2012-09-22王雪仁缪旭弘
王雪仁,贾 地,缪旭弘
(海军装备研究院舰船所,北京 100161)
1 引 言
针对大型复杂结构振动特性的求解问题,一直是人们普遍关注的问题。20世纪六十年代,Hurty[1-2]首先提出了子结构法的概念,其核心思想是将整体结构视为由若干个子结构以某种方式组合在一起的整体,而每个子结构的动力学特征可以用一组独立的模态来表示。Hurty将这些模态称为结构的特征模态,并引入了约束模态,以保证子结构间是作为一个整体存在,而非独立的个体。此后,许多人对这一方法在如何选择子结构模态和如何保证内部边界的几何连续性方面做了进一步的研究和发展[3-6]。20世纪80年代以后,人们对子结构方法的关注愈来愈少,主要是计算机的快速发展使原先难以整体建模处理的结构变得容易实现。然而,近来随着人们对船舶、飞机和卫星等这些大型复杂结构振动特性的关注,特别是对这些特性定量分析的要求,使子结构方法再次成为被关注的对象。
子结构间的边界处理协调条件、模态截取数和模型缩聚都对子结构方法预测精度和效率有较大的影响,然而以往的研究在这方面的工作还较少,该文将针对这些内容开展相关研究。
2 理论基础
2.1 子结构方法
子结构方法的基本思想是“分割与装配”,具体可分为三个步骤:一是划分子结构,即确定每个子结构的坐标关系;二是求解子结构的缩减矩阵及相互间的关系;三是子结构装配求解整个结构的振动响应。
阻尼系统的结构有限元动力学方程为:

式中,M、C和K分别为结构的质量、阻尼和刚度矩阵,x¨、x˙和x分别为加速度、速度和位移向量矩阵,每个节点分别包含三个平移自由度(x,y,z)和三个转动自由度(θx,θy,θz),F 为外部载荷向量。
假设该阻尼系统被分为n个子结构,其中第k个子结构有m个相邻的子结构,并以{I}k代表第k个子结构的内部自由度集,{B1}k、{B2}k、……、{Bm}k分别代表第 k 个子结构与第 k+1、k+2、……、k+m个子结构的公共边界自由度集,那么当考察第k+1个子结构对第k个子结构的影响时,第k个子结构的动力学方程可以分块矩阵的形式表示为:

式中,A表示 {I}k与 {B2}k、……、 {Bm}k等自由度集的并集,B 表示 {B1}k。
同理,可得到当考查第k个子结构对第k+1个子结构的影响时,第k+1个子结构的动力学方程可以分块矩阵的形式表示为:

这时,A表示 {I}k+1与 {B2}k+1、……、{Bl}k+1等自由度集的并集,l表示第 k+1 个子结构有 l个相邻的子结构,B 表示 {B1}k+1,且假定其第一个相邻的子结构为第 k 个子结构,则有 {B1}k+1={B1}k。依此类推,便可以得到所有子结构间相互关系的动力学方程,联合求解即能得到整个结构的动力学特性。但这个过程是复杂而繁琐的,计算量和数据存储量往往超过,甚至远大于整体结构直接建模求解。
为解决这个问题,就需要对如(2)式和(3)式所示的这些子结构的动力学方程进行解耦,以实现各子结构动力学方程的独立求解。第一步便是将位移坐标转换为模态坐标,即:

式中,ΨN和ΨC分别是结构的标准化的特征模态和约束模态矩阵,合称为模态转换矩阵Ψ,ξA和ξB分别是结构的界面和内部节点独立广义位移向量。Ψ和ξ可由特征值问题和静态平衡方程求得[2,7]。然后再进行第二次独立坐标变换,消除ξB中的非独立坐标,即:

式中,S为独立坐标变换矩阵,ζ为独立的广义坐标,具体形式见文献[7]。
将(4)式和(5)式代入(2)式和(3)式等子结构动力学方程中,并根据各子结构间相互连接的协调条件,即可得到求解系统响应的缩减后的系统动力方程

求解方程(6)后,即可将相应的结果由模态坐标转换为物理坐标,以得到结构的实际响应。
2.2 子结构间界面协调条件处理
子结构间相互连接的协调条件是影响子结构方法求解精度的关键因素,其连接方式可以处理为刚性连接、柔性连接,或者是简单的位移连续条件。在数学处理上,这些边界条件均可以由边界点的线性约束组合表示,约束矩阵方程为[5]:

式中:A为m×n阶系数矩阵,y为n×1阶位移矩阵,d为m×1阶常数矩阵。
子结构间的实际连接方式是多种多样的,典型的有螺栓连接、焊接、铆接及扣接等,在有限元求解中,这些连接均可通过定义刚性连接、柔性连接,或者是简单的位移连续条件来实现,由方程(7)来描述。例如,考虑连接节点a和b的点焊,如果两节点之间的距离可以忽略,则a和b的位移是相同的,即

如果两节点之间的距离不可忽略,则可用刚性棒模型处理两节点之间的位移关系,即

式中,θa和θb是节点角向量,r为由b到a的距离向量。
但是,有些连接在数学处理上是不易准确定义的,如螺栓连接,其预紧力大小将会影响连接点的自由度约束情况。因此,实际约束情况可分为以下两类:

由方程(7)可以看出,子结构间协调条件越多,方程(7)的维数越大,同时,(4)式中的约束模态矩阵ΨC的维数e与协调条件数h的关系为

因此,子结构间协调条件的增加将会导致子结构方法效率的降低。
3 结构模型
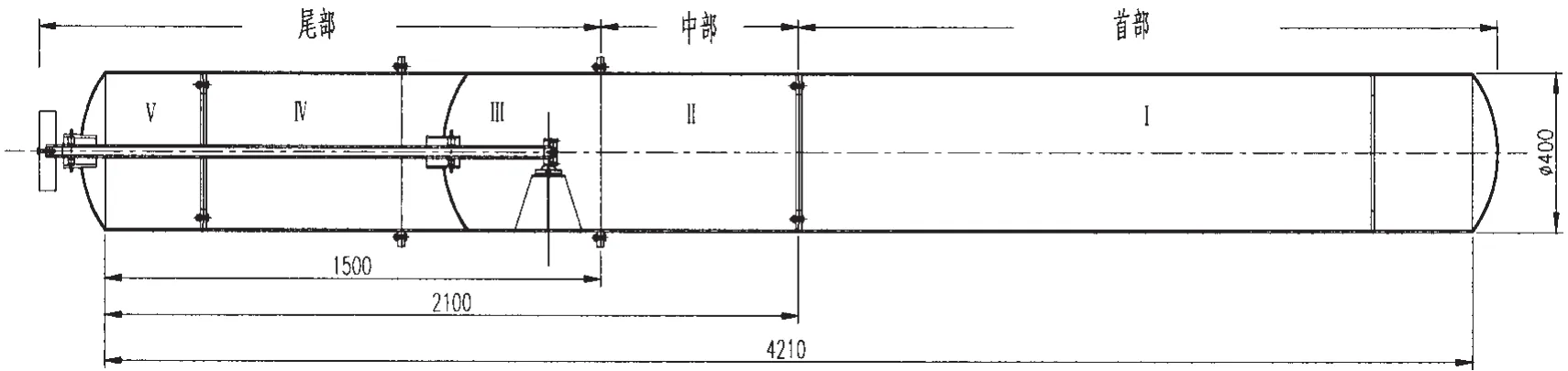
图1 圆柱壳体模型结构尺寸Fig.1 Dimensions of the cylindrical shell model
考察的模型为图1所示的圆柱壳体结构,整个结构由五个分段组成,分段之间靠内法兰或外法兰螺栓连接,在Ⅲ、Ⅵ、Ⅴ段内设计有轴系结构。利用子结构法进行仿真计算和模型试验时,将结构分为首部(第Ⅰ段)、中部(第Ⅱ段)和尾部(第Ⅲ、Ⅵ和Ⅴ段)三部分。结构实物如图2所示。

图2 圆柱壳体模型实物相片Fig.2 Photo of the cylindrical shell model
结构的固有模态测试分为四个部分:首部、中部、尾部三个子结构测试,以及模型整体测试。均采用弹簧吊装的方式模拟各结构的自由约束边界条件,为获得结构的振型,采用单点激励多点响应的测试方法。为激起结构的中高频模态响应,采用铝质力锤头激励,数据采集与处理系统采用LMS Test.lab系统。
4 非缩聚模型子结构方法精度和效率分析
所谓非缩聚模型子结构方法是指在子结构装配时均不作模型缩聚/降阶处理,而是直接将各子结构的有限元模型通过(10)式或(11)式组装在一起求得整体结构的振动特性。
4.1 结构特征模态的非缩聚模型子结构方法分析
针对图1所示模型,采用传统有限元法和子结构方法分别进行整体建模和子结构装配计算。在子结构方法中,圆柱壳体模型被分为图2所示的首部、中部和尾部三个子结构,三个子结构装配组成整体结构时,首部和中部之间,以及中部和尾部之间的边界协调条件同时取(10)式或(11)式。不同方法的整体结构模态预测结果如图3所示。可以看出,边界协调条件对子结构方法的预测精度影响较大,当子结构间边界协调条件取(10)式时,子结构方法和整体建模直接计算方法吻合很好,说明二者具有同样的精度。
进一步对比整体结构典型特征模态的子结构方法、直接法预测结果及试验测量结果如表1。可以看出,三种方法预测结果吻合较好,说明子结构方法可正确预测结构的振动特性。子结构方法的预测精度相对于直接方法略差,是由子结构间边界条件的连接处理和子结构的截取模态数有限引起的。
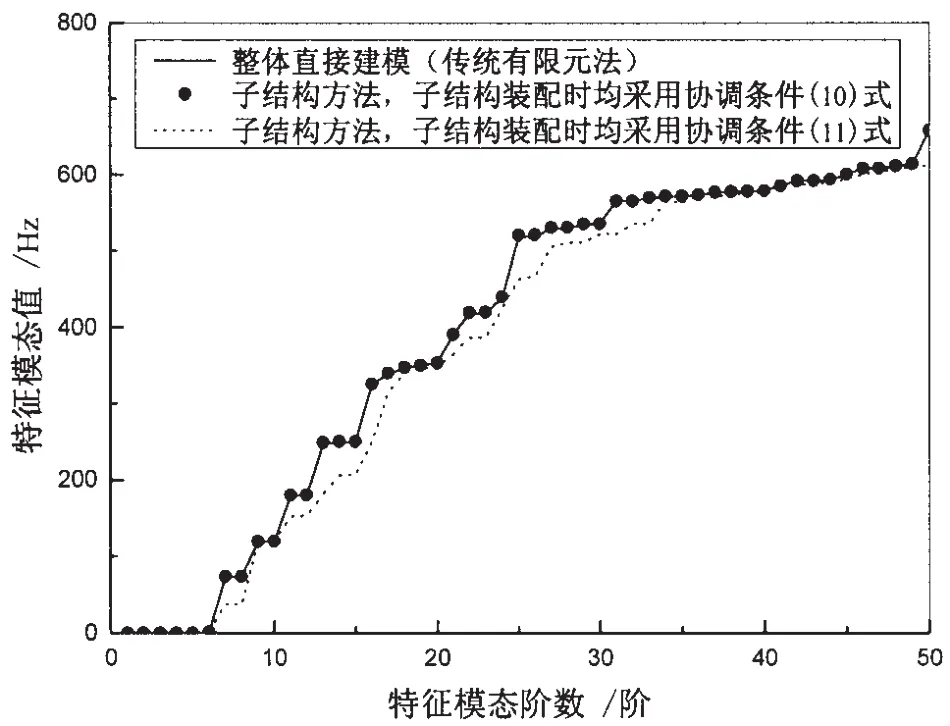
图3 整体结构模态预测结果Fig.3 Prediction of the system structure modes
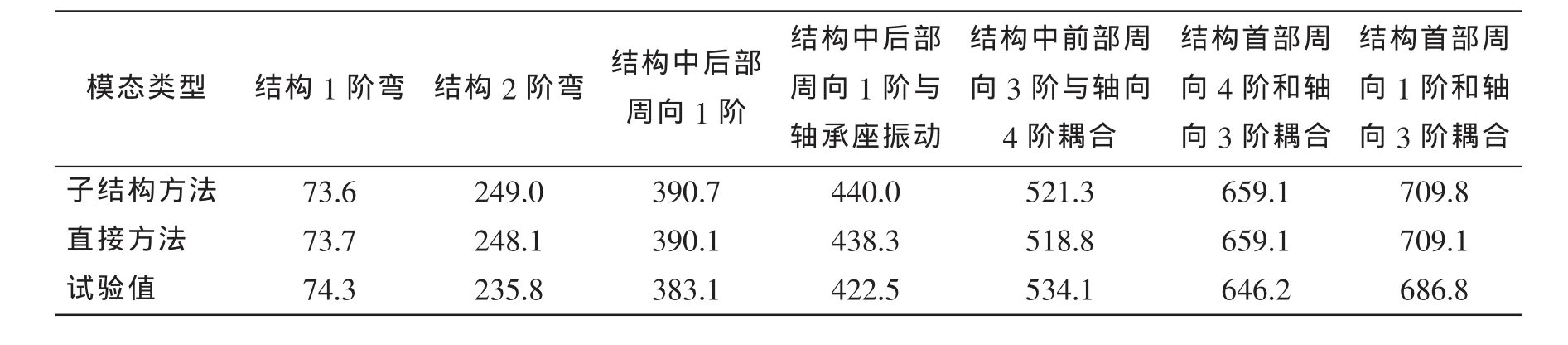
表1 整体结构典型模态比较(单位:Hz)Tab.1 Comparison of the typical modes of the system structure among different methods(Hz)
4.2 非缩聚模型子结构方法效率分析
当子结构间公共边界的协调条件取(10)式,且各子结构的特征模态数为50阶时,传统有限元法(直接法)与子结构方法耗费的时间与内存量的比较如表2。由表中可以看出,子结构独立计算时子结构方法耗费的时间明显多于直接法,而占用的内存量基本一致,这是由于子结构方法中除了求解特征模态外还有约束模态,导致计算时间增大,而内存量只与模型单元和节点数有关。子结构方法的整体结构模态的计算时间明显小于直接法,而占用内存量明显大于直接法,这是由于子结构方法采用模态综合法求解整体结构模态,不需有限元矩阵方程组形成和求解,但需要大量的各子结构模态信息结果数据。各子结构模态参与计算的阶数对应的整体结构模态求解时间和内存量如表3,关系曲线如图4和图5。由此可以看出,整体模态的计算时间和内存量以线性关系随各子结构模态参与阶数的增加而增大。
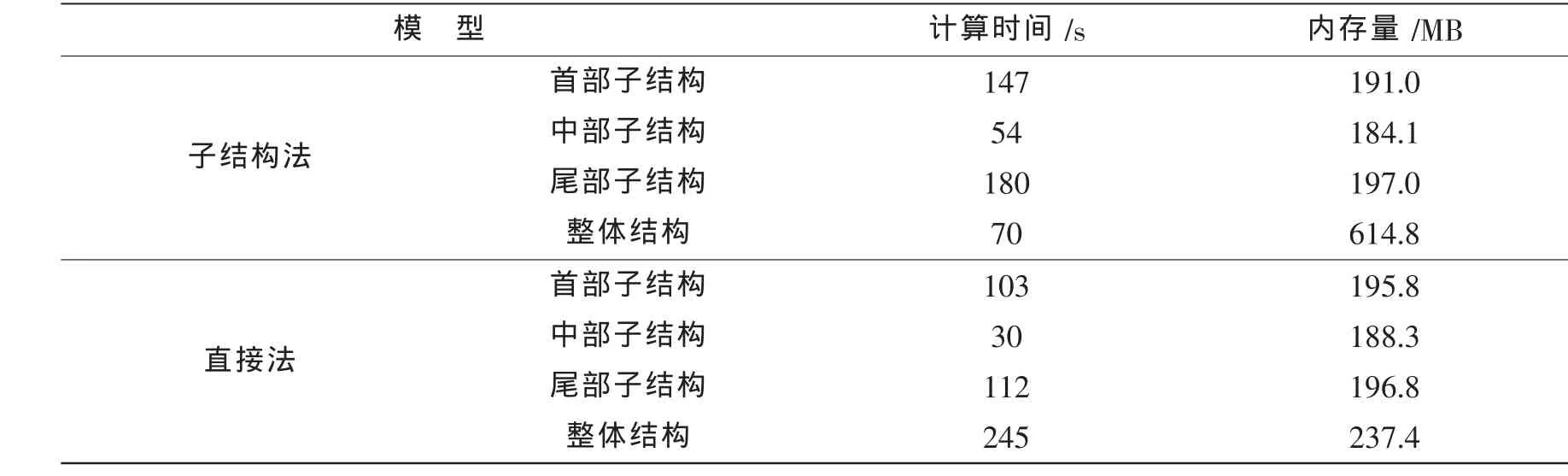
表2 传统有限元法法与子结构法计算时间与内存量比较Tab.2 Comparison of the computational time and memory requirements between the conventional FEM and the substructure synthesis method

表3 子结构模态参与阶数对整体结构模态计算时间与内存量的影响Tab.3 Effect of the number of the substructure modes on the computational time and memory requirements for predicting the system structure modes
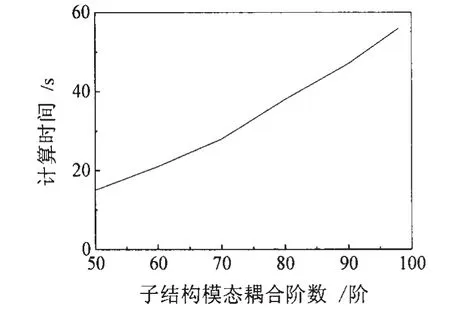
图4 子结构模态参与阶数对整体结构模态预测计算时间的影响Fig.4 Effect of the number of the substructure modes on the computational time for predicting the system structure modes
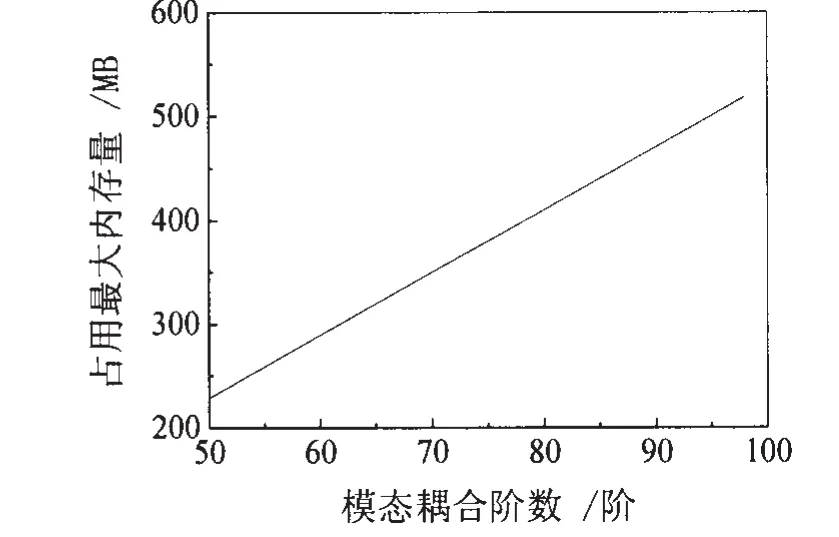
图5 子结构模态参与阶数对整体结构模态预测占用内存量的影响Fig.5 Effect of the number of the substructure modes on the memory requirements for predicting the system structure modes
因此,非缩聚模型子结构方法在求解效率上与直接法类似,但由于其将串行工作转为并行,支持异地仿真独立建模,所以,在实际应用时可有效缩短前处理中的建模时间,对大型复杂结构振动特性的仿真计算来说具有重要应用价值。
5 缩聚模型子结构方法精度和效率分析
从4.2节可以看出,非缩聚子结构方法的求解效率相对于直接建模计算方法并无显著提高,甚至会出现下降,而模型缩聚/降阶是提高子结构方法的有效途径之一。因此,本节对模型缩聚子结构方法进行研究。所谓缩聚模型子结构方法是指对部分或全部子结构进行模型缩聚/降阶后再装配成整体结构,进而求得整体结构的振动特性。根据整体结构包含的子结构模型类型(包括非缩聚模型和缩聚模型两种),以及(10)式和(11)式两种协调条件定义,针对图1所示圆柱壳模型,可通过定义以下四种子结构间交界面协调条件处理方式来全面考查协调条件对缩聚模型子结构装配计算结果精度的影响:
协调条件一:非缩聚模型与非缩聚模型和缩聚模型与非缩聚模型之间协调条件均采用(11)式。协调条件二:缩聚模型与非缩聚模型和缩聚模型与缩聚模型之间协调条件均采用(10)式。
协调条件三:非缩聚模型与非缩聚模型之间协调条件采用(10)式,缩聚模型与非缩聚模型之间协调条件采用(11)式。
协调条件四:缩聚模型与缩聚模型之间协调条件采用(10)式,缩聚模型与非缩聚模型之间协调条件采用(11)式。
5.1 结构特征模态的缩聚模型子结构方法分析
考察图6所示的整体结构缩聚模型:(a)为尾部子结构缩聚;(b)为尾部和中部子结构缩聚;(c)为三个子结构全部缩聚。
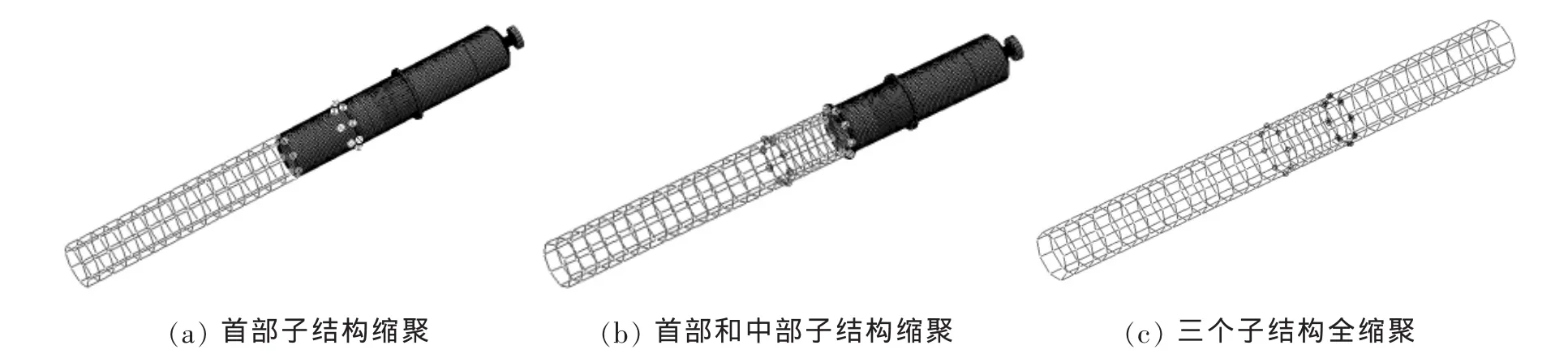
图6 子结构缩聚模型装配结构Fig.6 The system structure with reduction substructure models
子结构间交界面协调条件对图6所示三种模型结构模态的预测结果如图7-9,计算中各子结构均取其前60阶特征模态。由于图6(a)所示模型没有缩聚模型和缩聚模型之间的组合,(c)所示模型没有非缩聚模型和非缩聚模型之间、缩聚模型和非缩聚模型之间的组合,因此,针对(a)所示模型将考查协调条件一、二和三,针对(b)所示模型将考查所有四种协调条件,针对(c)所示模型将考查协调条件一和二等对预测结果的影响。可以看出,对首部子结构进行缩聚时采用协调条件一和协调条件三得到的结果相近,与直接计算结果吻合很好,低频段协调条件三略好,而采用协调条件二时所得结果误差则较大,特别是高频段差别很大;对首部和中部子结构同时进行缩聚时,采用协调条件一计算得到的结果明显好于其它几种协调条件,与直接计算结果吻合很好;同样对首、中和尾部子结构同时进行缩聚时的计算结果仍得到相同结论。因此,在边界协调条件处理合适的条件下子结构模型缩聚对整体结构模态的预测结果影响不大,即使在子结构的特征模态阶数范围之外,子结构方法预测结果与整体模型直接计算的结果也吻合很好,说明子结构的模型缩聚并不显著影响对结构振动特性的求解精度,随着缩聚模型的增多,整体模态预测精度略有降低。
图10为子结构全部降阶(图6(c))时,特征模态数对整体结构振动特性求解精度的影响,边界协调条件取(11)式。可以看出,随着特征模态数的增大,求解精度逐渐升高,但到达一定数目时预测结果趋于稳定,如图中60阶和90阶时二者结果基本一致。因此,在分析整体结构模态时,只需保证子结构的模态阶数与整体结构的分析模态阶数相同即可。
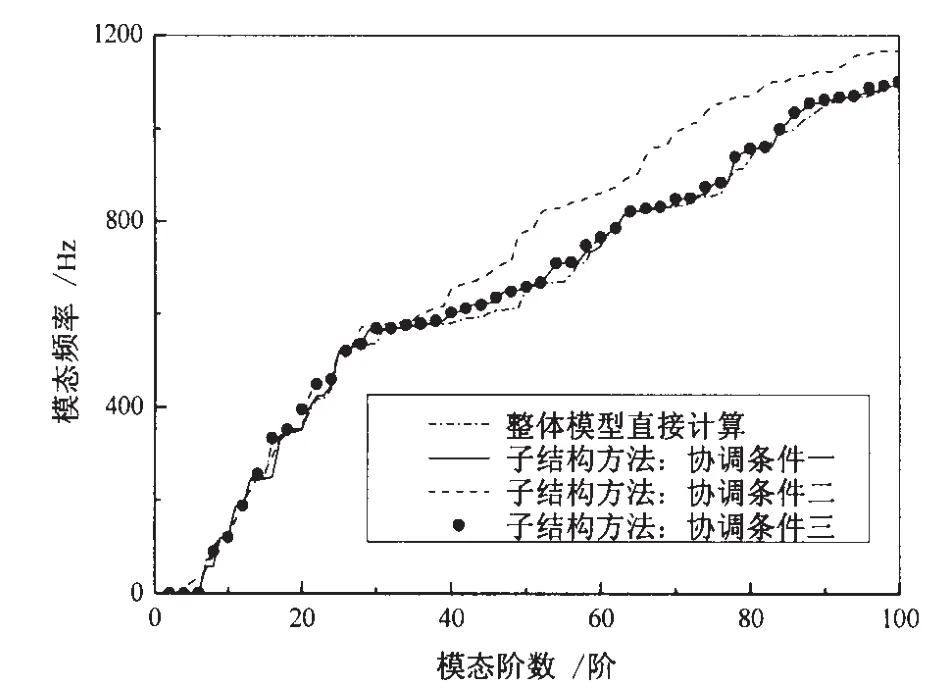
图7 交界面协调条件对图6(a)模型模态预测结果的影响Fig.7 Effect of the boundary conditions on the prediction results of the system structure shown as in figure 6(a)
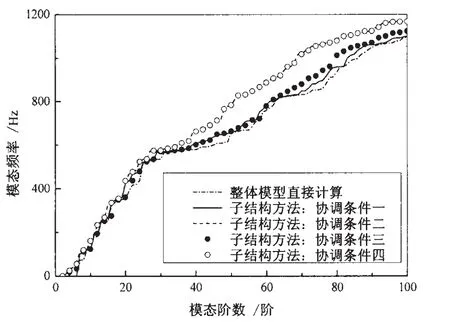
图8 交界面协调条件对图6(b)模型模态预测结果的影响Fig.8 Effect of the boundary conditions on the prediction results of the system structure shown as in figure 6(b)
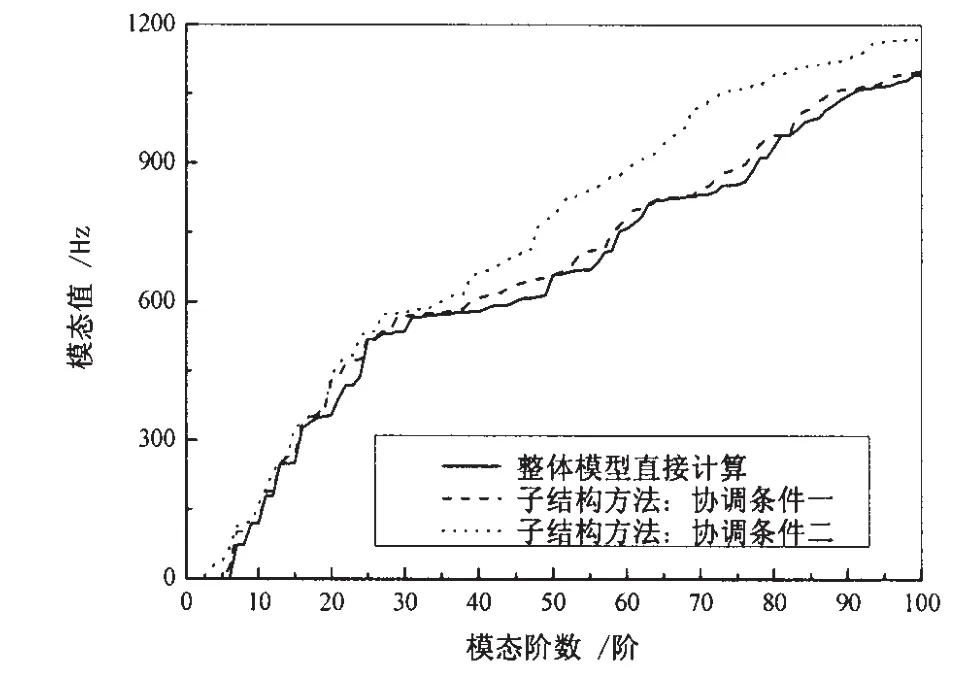
图9 交界面协调条件对图6(c)模型模态预测结果的影响Fig.9 Effect of the boundary conditions on the prediction results of the system structure shown as in figure 6(c)
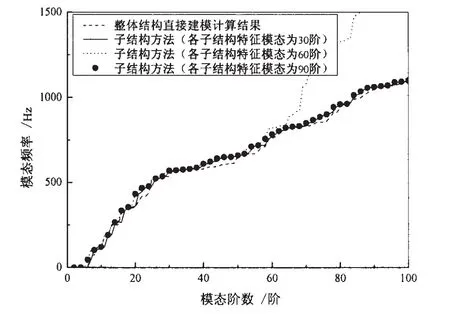
图10 特征模态阶数对图6(c)模型模态预测结果的影响Fig.10 Effect of the number of the component modes on the prediction results of the system structure shown as in figure 6(c)
5.2 结构特征模态的缩聚模型子结构方法效率分析
缩聚模型子结构方法中各子结构的计算过程与非缩聚模型子结构方法相同,这里不再赘述。各子结构均取前90阶特征模态且所有模态均参与仿真计算时,图6所示三种模型耗费的时间和内存量比较如表4。由表中可以看出,模型缩聚对提高子结构方法的计算效率效果显著。

表4 子结构模型缩聚对计算时间与内存量的影响Tab.4 Effect of the model reduction of the substructure on the computational time and memory requirements
6 试验模态与计算模态混合求解
试验模态和计算模态的混合计算是子结构方法的一个显著优点。因为对于复杂的实际结构,其数值建模和仿真计算过程往往非常复杂,且计算精度不易得到保证,如果直接利用测试结果代替计算结果,则无疑可避免仿真计算的各种缺陷。
根据模型试验结果,这里分别利用各子结构的试验模态与计算模态来预测整体结构的振动特性。由于试验中结构振动响应测试点的数目有限,网格划分如图11所示。试验模态与计算模态混合计算子结构方法过程类似于缩聚模型子结构方法,只需将缩聚模型的计算模态用试验模态代替即可。
不同试验模态和计算模态混合计算结果比较如图12所示。由图中可以看出:前35阶模态范围内首部或中部子结构采用试验模态时可以取得较好的计算精度,而尾部子结构采用试验模态时预测结果相对较差,原因是首、中部子结构为轴对称结构,较易满足试验模型和计算模型的一致性,而尾部子结构内有轴系结构,不易保证试验模型与计算模型较好的对应关系;随着频率的增加,试验模态与计算模态混合仿真计算的误差增大,是由试验对高频模态的遗漏和测量误差增大引起的;采用试验模态参与计算的子结构数越多,整体结构模态预测结果误差越大,且会丢失很多模态信息,如三个子结构全部利用试验模态进行仿真计算时,整体结构的一阶弯曲模态等重要信息的丢失,其原因一是试验测试数据的不足,二是试验条件的限制造成的测量误差,特别是由轴对称模态和约束模态测量的不准确等因素引起的。
通过该算例研究,证明了本文所发展的子结构方法可利用试验模态和理论计算模态混合计算求解整体结构的振动特性,且具有一定的精度,在工程上是可行的。随着试验条件和测试方法的进一步完善和深入研究,其精度必然能得到提高。
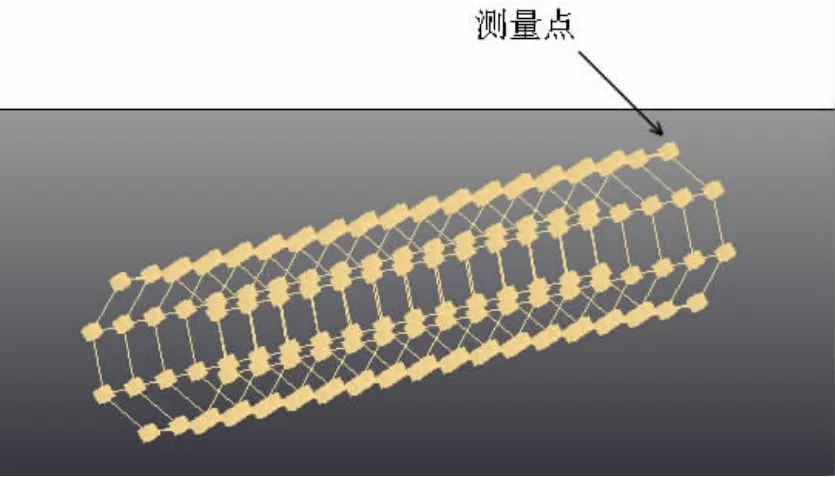
图11 模态测试中子结构模型Fig.11 Substructure model in the test
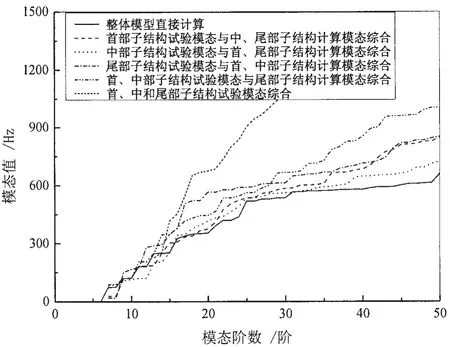
图12 试验模态和计算模态的混合计算结果比较Fig.12 Comparison of the predition results obtained by testanalysis models with experimental and computational component modes
6 结 论
本文发展了子结构方法,并应用于圆柱壳体模型研究,且分析了影响其预测精度和效率的主要因素,结果表明子结构方法在船舶振动特性预测中的应用是可行的,主要得到了以下结论:
(1)子结构间的交界面边界协调条件对整体结构模态的预测精度有较大影响,除非缩聚模型与非缩聚模型之间协调条件采用(10)式(即两对应连接节点间的平移和转动自由度全部耦合约束)外,缩聚模型与缩聚模型之间、缩聚模型与非缩聚模型之间协调条件均采用(11)式(即两对应连接节点间的平移自由度耦合约束,而转动自由度则不约束)时可保证子结构方法仿真计算结果达到较高的精度;
(2)在各子结构振动特性已知的情况下子结构方法可快速求解整体结构振动特性,其计算时间和内存量以线性关系随着子结构参与计算的模态阶数的增加而增大;
(3)子结构方法可以使复杂结构的振动分析工作由传统的“串行”变成“并行”,提高了人员和设备的效率,且子结构模型缩聚对子结构方法的预测精度影响不大,但可有效节约仿真计算时间和存储量,对分析大型复杂结构的振动特性具有重要应用价值;
(4)子结构方法可利用试验模态和理论计算模态混合计算求解整体结构的振动特性,且具有一定的精度,在工程上是可行的,对进一步利用已有成果提供了有效的途径,对船舶振动噪声特性的分析具有重要价值。
[1]Hurty W C.Vibration of structural systems by component mode synthesis[J].Journal of the Engineering Mechanics Division,ASCE,1960,86:51-69.
[2]Hurty W C.Dynamic analysis of structural systems using component modes[J].AIAA Journal,1965,3:678-685.
[3]Meirovitch L,Halet A L.On the substructure synthesis method[J].AIAA Journal,1980,19(7):940-947.
[4]Jiang J S,Tong W H.How many modes are acceptable and how do people improve the modes?[J].Journal of Sound and Vibration,1999,228(3):559-567.
[5]Gene Hou,Yang Wang.A substructuring technique for design modifications of interface conditions[C]//45th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics&Materials Conference.California,Palm Springs,2004.
[6]Kim D K,Lee M S,Han J H.Substructure synthesis method for a nonlinear structure with a sliding mode condition[J].Journal of Sound and Vibration,2008,doi:10.1016/j.jsv.2008.09.052.
[7]殷学纲,陈 淮,蹇开林编著.结构振动分析的子结构方法[M].北京:中国铁道出版社,1991:200-208.
