复合电流驱动的永磁同步平面电机
2012-09-16寇宝泉李立毅
寇宝泉 张 鲁 李立毅
(哈尔滨工业大学电气工程及自动化学院 哈尔滨 150001)
1 引言
现代精密、超精密加工装备对高响应、高速度、高精度的平面驱动装置有着迫切的需求,平面电机可以实现二维直接驱动,相对于传统的二维平面定位装置,不存在摩擦、侧隙、变形等问题,可以和控制对象做成一体化结构,具有反应快、灵敏度高、随动性好及结构简单等优点[1]。目前,已经开发出多种形式的平面电机,根据电磁推力的产生原理,可以将其分为变磁阻型[2]、感应型[3]、永磁同步型[4,5]和直流型[6]等。每类平面电机电磁推力的产生原理分别与同类型旋转电机电磁转矩的产生原理类似。在各类平面电机中,永磁同步型平面电机具有结构简单、推力大、效率高和响应速度快等良好的综合性能,在二维平面驱动装置、特别是精密二维平面驱动装置中有广阔的应用前景[7]。
目前很多学者,如 MIT的 Kim和日本的 Gao提出的平面电机大都可以看作由多套直线单元组合而成,这类平面电机通常包含多套电枢绕组和与之对应的永磁阵列,其与x、y方向对应的永磁阵列和线圈分别产生x、y方向的力,通过组合直线运动实现平面运动[8-10]。由于线圈阵列或永磁阵列自身结构尺寸的限制,这一类平面电机的运动范围通常比较小。此外,当该类电机作单方向运动时,只有对应该方向的绕组工作,而其他绕组则处于闲置状态,这样不但降低了绕组的利用率,而且对于线圈部分作为动子的情况,闲置绕组还增加了运动部分的质量,不利于平面电机动态性能的提高。针对这种情况,本文提出一种复合电流驱动的永磁同步平面电机,采用一套空心绕组,利用复合电流驱动,摆脱了通过组合直线运动达到平面运动的方式,可以直接实现平面运动。采用复合电流不但提高了绕组的利用率,还降低了动子的质量,有利于实现较高的动态性能。此外,所采用的永磁阵列结构简单,便于扩展,电机可实现大范围运动。在带来一系列优点的同时也难免存在一些不足,如采用复合电流驱动,对电机驱动控制提出了更高的要求;绕组采用无铁心结构,大大降低电机的推力波动,但在实现高推力方面将存在一定的挑战。
图1所示为复合电流驱动的永磁同步平面电机结构图。它主要包括电枢部件和永磁体励磁部件,电枢部件和永磁体励磁部件之间为气隙,其中电枢部件主要由电枢绕组构成;永磁体励磁部件包括永磁体阵列和永磁体轭板;每个平面电机由i个单元电机构成,每个单元电机包括9个线圈和2块永磁体,电枢部件中的线圈极距τt与永磁体励磁部件中的永磁体阵列极距τp之间满足关系 3nτt=(3n±1)τp,所述9个线圈组成3×3的矩阵,每个线圈为一个相电枢绕组,一共有9个相电枢绕组,分别表示为:A相、B相、C相、D相、E相、F相、G相、H相、I相电枢绕组,所述九个相电枢绕组星形联结,每相电流表达式如式(1)所示[1]。

图1 复合电流驱动的永磁同步平面电机Fig.1 Composite current-driven synchronous permanent magnet planar motor

式中Ixm,Iym—x、y方向驱动电流的幅值;
ωx,ωy—x、y方向驱动电流的频率。
2 磁场的解析
2.1 永磁阵列模型
图 2所示为本方案平面电机所采用的永磁阵列,该形式永磁阵列由 Asakawa在 1986年的专利中提出[11],其结构特点是:各行或各列由磁化方向一致(向上或向下)、等间隔排开的一组永磁体构成。其中N表示磁场方向指向纸外,S表示磁场方向指向纸内,未标注N或S的矩形面处为空气。利用解析法求解永磁阵列磁场,为了简化模型,在进行解析前先对平面电机永磁阵列作如下的假设[12]:
(1)假设铁轭的相对磁导率为无穷大。
(2)电机在x和y方向存在周期性。
(3)磁化强度为一恒定常数。

图2 Asakawa提出的永磁阵列Fig.2 Permanent magnet array proposed by Asakawa
2.2 标量磁位方程和边界条件
利用标量磁位方程和边界条件来求解永磁阵列所产生的磁场。图3所示为永磁阵列模型的剖面图。在本方案中,平面电机只在定子侧存在铁轭,动子仅由空心线圈组成。由于磁路为半开放形式,所以随气隙长度的增加,磁感应强度的幅值迅速减小,在距离永磁体表面三倍永磁体厚度处,磁感应强度大小接近于零,基本可以忽略不计。为便于磁场求解,假设永磁阵列表面上方三倍永磁体厚度处存在虚拟铁磁边界。

图3 永磁阵列模型剖面图Fig.3 Cross-section of permanent magnet array model


由于本方案中永磁阵列的永磁体均为法向充磁,Mx=My=0,所以其磁化强度可表示为
式中hm—永磁体充磁厚度;
下标 m和 g分别表示永磁体和空气;x、y、z分别表示各量在各个方向的分量。
2.3 方程的解
永磁阵列的磁化强度可表示为如下形式

式中Mk=2Br/(μ0πk);
ak=kπ/τp;
Br—永磁体剩磁。
依据边界条件,利用分离变量法求解拉普拉斯方程,考虑到永磁阵列在平面上分布的周期性和对称性,得到如下形式的方程的解[12-13]

式中

μr—永磁体相对磁导率。
在空气中,标量磁位和磁场强度、磁感应强度之间存在以下关系

根据式(7)和式(8)利用求得的标量磁位可以得到永磁阵列在气隙中x、y、z三个方向所产生的磁感应强度的表达式如下

式中

图 4所示为根据前面求得的式(11)解出的τp=60mm,hm=15mm时永磁阵列表面上方 3mm处磁感应强度z向分量的波形。

图4 气隙磁通密度z向分量波形Fig.4 z component air gap flux density
3 电磁推力和反电动势的解析
3.1 单元平面电机的电磁推力
在机电系统中求电磁力的方法大约有三种,即麦克斯韦应力法、虚位移法以及洛伦兹力法。在有限元程序中通常采用麦克斯韦应力法或虚位移法来计算力,因为不论载流导体在磁场内所受到的力还是磁质在磁场内受到的力都可以通过这些方法准确地计算出来。洛伦兹力方法只能用于计算载流导体在空间受到的力,因此其使用受到限制。但是,就力的计算来说洛伦兹力法比麦克斯韦应力法特别是虚位移法更快,因此洛伦兹力法也就更可取。在本方案中,为便于计算,采用洛伦兹力法求解单元平面电机的电磁推力,其计算式如下所示

式中N—绕组线圈匝数。
永磁阵列在气隙中产生的磁场为一个三维场,沿x、y方向正弦周期分布,幅值沿z正方向呈指数衰减形势。具有一定宽度和厚度的绕组在磁场中运动,切割磁力线而产生电磁推力,若直接求取,十分困难。为简化计算,在求解单元平面电机的电磁推力时,对磁场和绕组进行一定的等效和简化。对磁场来说,只考虑其基波分量,忽略高次谐波分量;对绕组来说,假设线圈线径无穷小。这样就可以用图5中的虚线来代替每个绕组的N匝线圈,并且利用虚线所处位置处的磁感应强度来等效计算线圈所受的电磁推力。
本方案中单元平面电机的九个线圈相对于永磁阵列的初始位置如图5所示,其中红色阴影区域代表永磁体N极,绿色阴影区域代表永磁体S极。根据式(12)可计算出单元平面电机在平面内运动时所产生的推力[14]

图5 单元平面电机结构示意图Fig.5 Schematic diagram of the single planar motor

式中Fz1,Fz2—法向力;
Fx,Fy—水平方向推力;
Bx1,By1,Bz1—气隙磁场在x、y、z三个方向的基波分量;
L—有效长度;
ia~ii—九个线圈所通入电流,其具体表达式如(1)所示。
由于永磁阵列在x、y方向均匀对称分布,所以平面电机沿x、y方向运动所产生的推力形式基本一致。图5中单元平面电机从初始位置(x1,y1)运动的推力如下所示[14]


式中Bmx,Bmy,Bmz—绕组中心处磁感应强度在x、y、z三个方向分量的幅值;
θ—始相位角。
3.2 单元平面电机的空载反电动势
根据法拉第电磁感应定律可知在磁感应强度为B的磁场中以速度v运动的单匝线圈的反电动势可表示如下

如图5所示,当单元平面电机沿x方向以速度v匀速运动时,线圈 a、b、c产生的反电动势可归为一相,同理线圈 d、e、f和线圈 g、h、i产生的反电动势分别归为一相,并且每相之间的相位差为2π/3,由式(17)可得其表达式如下
4 样机和实验
4.1 样机制造以及仿真模型建立
在前面解析分析的基础上,设计制造一台样机,如图6所示。该复合电流驱动的永磁同步平面电机样机由4套永磁同步单元平面电机组成,其最大运动范围为120mm,样机主要包括动子线圈部件、定子永磁阵列部件和支撑导轨部件等。由于定子永磁阵列在x、y水平两个方向均匀对称分布,所以电机在两个方向的运动过程类似,故实验时暂采用直线导轨来支撑动子线圈部分。样机各部分具体结构参数见下表所示。

表 样机结构参数Tab. Dimensions of the manufactured motor

图6 样机实物照片Fig.6 The prototype machine
参照上表中数据,在Ansoft Maxwell 3D中建立永磁同步平面电机样机的仿真模型如图7所示。

图7 平面电机仿真模型Fig.7 Simulation model of the planar motor
4.2 样机实验结果和仿真结果
4.2.1 永磁阵列的磁场
利用高斯计测量永磁阵列在气隙中产生的磁场,绘制磁场幅值随气隙高度的变化曲线和永磁阵列表面上方 3mm处的磁场波形分别如图 8和图 9所示。由图8可见,磁感应强度峰值随着气隙长度的增加呈现指数衰减的形势。
对比图9a、9b可以发现,磁场波形的形状和变化趋势基本一致。但由于气隙磁场中高次谐波的影响,磁场波形的正弦性较差,在接下来的工作中将会采用 Halbach永磁阵列来取代目前所采用的阵列,从而改善磁场波形[15]。

图8 气隙磁场幅值随h的变化曲线Fig.8 Peak value of Bg versus h


图9 样机永磁阵列的磁场波形Fig.9 Magnetic field waveforms of prototype motor’s magnet array
4.2.2 样机的推力
利用图7所示的永磁同步平面电机模型进行仿真,令样机动子线圈沿x轴以0.5m/s的速度匀速运动120mm,绕组线圈相电流幅值为1.9796A,考虑初始相位角,三相绕组通入电流表达式为


图10 平面电机的电磁力Fig.10 Forces of the planar motor
通过仿真得到永磁同步平面电机沿x方向运动产生的推力Fx、Fy如图 10所示。由图可见,平面电机样机沿x轴匀速运动时产生的电磁推力Fx平均值约为50N,和通过电磁力解析式所求得的结果基本一致。由于单边铁磁边界永磁阵列产生的磁场中漏磁和高次谐波的影响,导致推力Fx的波动较大。此外,样机在x方向运动时在y方向产生的寄生推力Fy基本为零。
由于永磁同步平面电动机电机本体设计部分为现阶段研究重点,驱动控制部分研究相对滞后,与动态相关的特性暂时无法测试,故只对电机进行静态实验。利用实验室现有条件对样机静态最大推力进行测量,测试平台如图11所示。测试所用传感器为美国威世公司(VISHAY)的LPS型传感器。

图11 样机静态推力测试Fig.11. The test site of the static force
测量样机静态推力时,将绕组X、Y、Z端短接,使线圈呈Y形联结,测量等效三相绕组中某一相电流为最大时电机的静态推力。例如,当A相绕组输入电流2.80A时,B相、C相绕组输入电流-1.4A。通过多次测量获得样机最大静态推力为57.57N,与仿真结果56.85N之间存在一定误差,但均接近于设计指标。
为验证平面电机样机静态推力的线性度,逐渐增大样机等效三相绕组中某一相绕组输入电流的大小,对样机所产生的静态推力进行多次测量,并和计算结果比较,得到如图12所示的曲线。由图 12可见,样机静态最大推力随输入电流的增大,基本呈线性变化,并和计算值基本吻合。
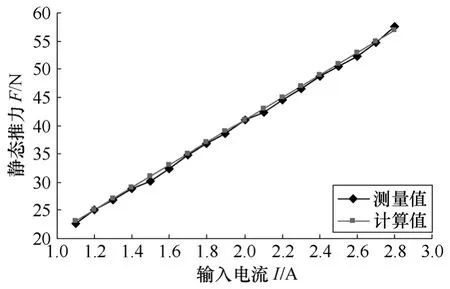
图12 静态推力随输入电流的变化曲线Fig.12. The curve of the static force according to input current
4.2.3 样机的空载反电动势
利用图7所示的模型进行仿真,令样机动子线圈沿x轴以0.5m/s的速度匀速运动120mm,获得等效三相绕组的反电动势波形如图13a所示。
在实验室条件下,拖动平面电机样机动子沿x方向运动,匀速后速度为0.5m/s。通过示波器观察等效三相绕组的空载反电动势波形,多次测量,获得反电动势波形如图13b所示。

图13 样机的空载反电动势波形Fig.13 The back-EMF waveforms of the prototype motor
对比图13a、13b可以发现,反电动势波形的形状和峰值都基本吻合。但由于支撑导轨和永磁阵列的限制,本轮样机行程有限,导致实验结果在初始加速阶段所得到的反电动势波形存在较大偏差。此外,由于磁场高次谐波的影响,致使所得反电动势波形的正弦性较差,将会在接下来的工作中通过对磁场进行优化来改善。
5 结论
(1)提出了一种复合电流驱动的永磁同步平面电机,采用一套空心绕组,利用复合电流驱动,实现平面运动。
(2)利用标量磁位对电机的磁场进行了解析分析,获得气隙磁场的表达式。根据洛伦兹力法和法拉第电磁反应定律,求得单元平面电机的推力和反电动势表达式。
(3)在解析的基础上,设计制作了一台样机,并对样机进行了试验,测量了样机的磁场、静态推力和空载反电动势波形,通过对比实验结果和仿真结果,验证了解析和设计的合理性。
(4)由于本轮样机所采用永磁阵列磁场高次谐波的影响,样机推力波动和反电动势波形的正弦性有待提高。接下来将通过对永磁阵列和电机参数的优化进一步提高电机的性能。
[1]寇宝泉, 贵献国, 吴红星, 等. 复合电流驱动九相平面电机、直线—旋转电机及其驱动器: 中国,200910138883.1 [P]. 2009-05-14.
[2]Pan J F, Cheung N C, Gan W C. A novel planar switched reluctance motor for industrial applications[J]. IEEE Transactions on Magnetics, 2006, 42(10):2836-2839.
[3]Fujii N, Fujitake M. Two-dimensional drive characteristics by circular shaped motor[J]. IEEE Transactions on Industry Applications, 1999, 35(4):803-809.
[4]Cho H S, Jung H K. Analysis and design of synchronous permanent-magnet planar motors[J].IEEE Transactions on Energy Conversion, 2002,17(4): 492-499.
[5]Cao Jiayong, Zhu Yu, Wang Jinsong. A novel synchronous permanent magnet planar motor and its model for control applications[J]. IEEE Transactions on Magnetics, 2005, 41(6): 2156-2162.
[6]Gao Wei, Dejima Shuichi, Yanai Hiroaki. A surface motor-driven planar motion stage integrated with anx-y-θzsurface encoder for precision positioning[J].Precision Engineering, 2004, 28(3): 329-337.
[7]曹家勇, 朱煜, 汪劲松, 等. 平面电动机设计、控制与应用技术综述[J]. 电工技术学报, 2005, 20(4): 1-8.
Cao Jiayong, Zhu Yu, Wang Jinsong, et al. Survey of the state of the art in planar motor technology[J].Transactions of China Electrotechnical Socirty, 2005,20(4): 1-8.
[8]周赣, 黄学良, 周勤博, 等. 基于模式力的平面电机控制方法[J]. 电工技术学报, 2009, 24(2): 20-26.
Zhou Gan, Huang Xueliang, Zhou Qinbo, et al.Control methods of planar motors based on the modal force[J]. Transactions of China Electrotechnical Socirty, 2009, 24(2): 20-26.
[9]郝晓红, 梅雪松, 张东升, 等. 动磁型同步表面电机的磁场和推力[J]. 西安交通大学学报, 2006,40(7): 823-826.
Hao Xiaohong, Mei Xuesong, Zhang Dongsheng, et al.Magnetic field and thrust of moving magnet synchronous surface motor[J]. Journal of Xi’An Jiao Tong University, 2006, 40(7):823-826.
[10]Kim W J. High-precision planar magnetic levitation[D].Cambridje: Massachusetts Institute of Technology, 1997.
[11]Asakawa. Two dimensional positioning device: US,4626749[P]. 1986-12-02.
[12]Cho H S, Im C H, Jung H K. Magnetic field analysis of 2-D permanent magnet array for planar motor[J].IEEE Transactions on Magnetics, 2001, 37(5): 3762-3766.
[13]Cao Jiayong, Wang Shigang, Zhu Yu, et al. Modeling the static vertical force of the core-type permanentmagnet planar motor[J]. IEEE Transactions on Magnetics, 2008, 44(12): 4653-4658.
[14]张鲁. 复合电流驱动的永磁同步平面电机基础研究[D]. 哈尔滨: 哈尔滨工业大学, 2010.
[15]Min W, Zhang M, Zhu Y, et al. Analysis and optimization of a new 2-D magnet array for planar motor[J]. IEEE Transactions on Magnetics, 2010,46(5): 1167-1171.
