关于霍尔元件特性分析及参数的讨论
2012-09-15江铭波徐国旺
江铭波,贺 华,徐国旺
(湖北工业大学理学院,湖北 武汉430068)
1 霍尔元件的结构和霍尔电压
霍尔元件是根据霍尔效应制成的四端子磁电转换元件.主要由霍尔芯片、四根引线和壳体组成.芯片是一块用半导体晶体制成的矩形或十字形薄片,四根引线中有两根为外加激励电流或激励电压的输入电极,称为激励电极或控制电极;另两根是霍尔电压输出端引线,称为霍尔电极.外壳一般由塑胶树脂材料、非导磁材料或陶瓷材料制成,但有些外壳上带有高导磁率材料制成的磁性物质贴片,为的是获得较大的输出电压.
霍尔元件在垂直于芯片受磁平面的磁场B和控制电流I的作用下,产生霍尔电压[1]

其中d是芯片厚度;RH为霍尔系数.但严格讲,式(1)仅适于无限长的霍尔芯片,实际上芯片的长度是有限的,若芯片长为l,宽为b,长宽比之值常设在不同形状的芯片,将导致电流电极和霍尔电极对霍尔电压产生影响.因此实际产生的霍尔电压应修正为[2]

设KH为比例系数,则
式中,KH称为霍尔乘积灵敏度;为元件的形状函数或元件的形状效应系数.形状效应系数之值随元件的形状而异.从实际情形来看,十字形元件的值受磁场的影响较小,为了得到较高的值,实际应用的霍尔元件大都采用十字形.元件的形状系数修正值分别如表1[3]和图1所示.
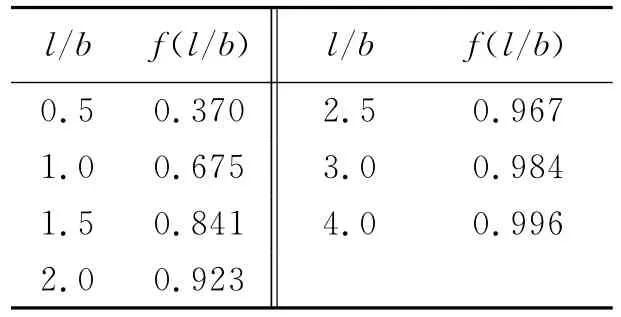
表1 形状效应系数
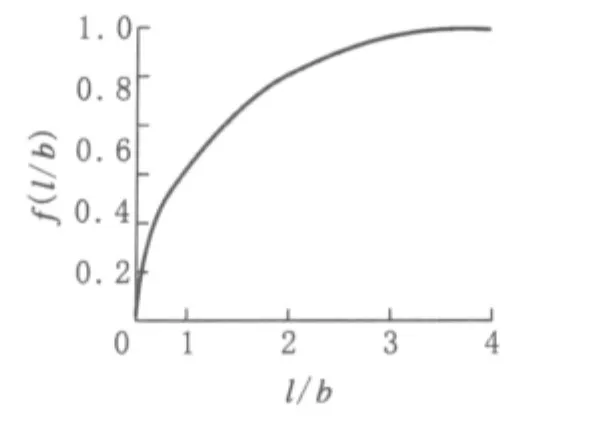
图1 霍尔元件形状系数曲线
2 对霍尔元件几个特性参数定义的讨论
描述霍尔元件的特性参数较多,各厂家给出的参数不尽一致,对参数名称的定义也不十分严谨.这无疑给研究、设计及使用者等带来不便.依笔者拙见,提出如下几点看法,以和广大读者讨论.
2.1 额定控制电流、最大控制电流和额定功耗
由于霍尔材料本身特性以及使用时受到环境、温升、散热条件等的影响,其控制电流受到限制,其所限控制电流的大小如何确定,在文献中,大约有3种表述:1)当霍尔元件自身温升100C时所流过的控制电流,称为额定控制电流Ic;当霍尔元件达到其允许的最高温升时,流过霍尔元件的电流称为最大控制电流Icm[4].2)霍尔元件因电流而发热,使在空气中的霍尔元件产生允许温升ΔT的控制电流称为额定控制电流Icm,当I>Icm时,器件温升将大于允许的温升,器件特性将变坏[5].3)根据额定功耗P0定义额定控制电流:在环境温度250C时,允许通过霍尔元件的电流和电压的乘积称为霍尔元件的额定功耗P0,当供给霍尔元件的电压确定后,根据额定功耗P0就可以确定额定控制电流[6].
对霍尔元件,使用额定控制电流这一参数是完全必要的,在额定控制电流范围内使用霍尔元件是安全的;而对于“最大允许控制电流”的概念,可以并入额定控制电流这一概念之中,并对额控制电流严格定义为:在环境温度250C时,使霍尔元件产生允许温升ΔT的控制度电流称为额定控制电流,即

式中,b、d分别为霍尔元件宽度和厚度;ρ为元件工作区电阻率;as为元件的散热系数.因此,额定控制电流Icm是与材质、元件大小、散热条件及允许温升ΔT有关的量.
额定功耗定义为:在环境温度250C时,允许通过霍尔元件的额定控制电流Icm和电压的乘积,用P0表示.
2.2 霍尔灵敏度KH和磁灵敏度KB
霍尔乘积灵敏度
简称为霍尔灵敏度或灵敏度,由霍尔片自身的材料结构和尺寸以及结构决定,是反映霍尔元件磁电变换大小的一个重要参数.一般要求KH越大越好,显然d越小,KH越大.但元件厚度太薄,会使元件的输入、输出电阻增加,因此不宜太薄.此外KH与形状系数有关.在霍尔片的材质和形状尺寸以及结构决定后,KH就成为一个常数.在实际使用上,霍尔元件的使用手册中经常是在输入Ic=1mA的控制电流,在垂直于感磁面方向施加0.1T的外磁场B条件下,给出其霍尔电极上产生的霍尔电压值,以此种形式体现出霍尔元件的灵敏度,其单位为mV/(mA·T).
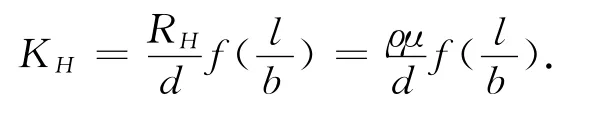
磁灵敏度定义为:当控制电流为额定控制电流Icm时,单位磁感应强度产生的开路霍尔电动势称为磁灵敏度,用KB表示.是在当时,由于并根据式(5)计算出最大霍尔电压

因而根据定义,求得

可见选用乘积μρ1/2和允许温升ΔT大的半导体材料,就可以得到较大的磁灵敏度,N型砷化镓霍尔元件的μ和ρ均较大,其磁灵敏度也大.
2.3 不平衡电势U0和不平衡电阻r0
在额定控制电流Icm之下,不加磁场时,霍尔电极之间的空载霍尔电势称为不平衡电势,或不等位电势,用U0表示,单位为mV.不平衡电势U0和额定控制电流之比称为不平衡电阻,或不等位电阻,用r0表示.不平衡电势U0是额定控制电流通过不平衡电阻r0产生的电压降.不平衡电阻是由于元件输出极焊接不对称、厚薄不均匀以及两个输出极接触不良等原因造成的.有的文献对不等位电势U0这样定义:当控制电流I流过元件时,即使磁感应强度等于零,在霍尔电极上仍有电动势存在,该电动势称为不等位电动势U0.显然这里的不等位电势与前者不完全等同.有些产品提供不平衡电势U0之值应为前者,有些产品提供不平衡电阻r0参数数值,则更为确切.
3 霍尔元件的零位误差
在实际使用中,存在着各种影响霍尔元件精度的因素,即在霍尔电势中存在着各种误差电势,产生这些误差的因素主要有两类,一类是半导体本身所固有的温度特性;另一类是半导体制造工艺的缺陷.分别表现为温度误差和零位误差.笔者仅分析零位误差的物理机制.
3.1 零位误差
零位误差是在不加控制电流或不加外磁场时.出现的霍尔电势.前述不平衡电势是主要的零位误差.不平衡电势输出,其数量级与霍尔电势的数量级相当,因此对霍尔元件的不平衡电势不能忽略.如果经过测试确知霍尔电极偏离等位面的方向,则可以采用机械修磨或用化学腐蚀的方法来减小不等位电势.现在一般采用补偿网络进行补偿.
3.2 寄生直流电势
在没有磁场下,元件通以交流控制电流,其输出除了交流不等位电势外,还有个直流电势分量,此电势称为寄生直流电势.产生寄生直流电势的原因有两个,一是由于电流控制极及霍尔电极的欧姆接触不良,造成整流效应;二是由于霍尔电极的焊点大小不同,导致两焊点的热容量不同而产生温差效应,造成直流附加电势.
寄生直流电势很容易导致输出产生漂移,为减小其影响,在元件制作和安装时应尽量改善电极的欧姆电阻接触性能和元件的散热条件.
3.3 感应零电势Ui0
当没有控制电流时,在交流或脉动磁场作用下产生的电势称为感应零电势Ui0.它与霍尔电极引线构成的感应面积s成正比,如图2a所示,根据电磁感应定律有
为了减小感应零电势,可通过合理布线,使霍尔电极引线围成感应面积s所产生的感应电势互相抵消(图2b).
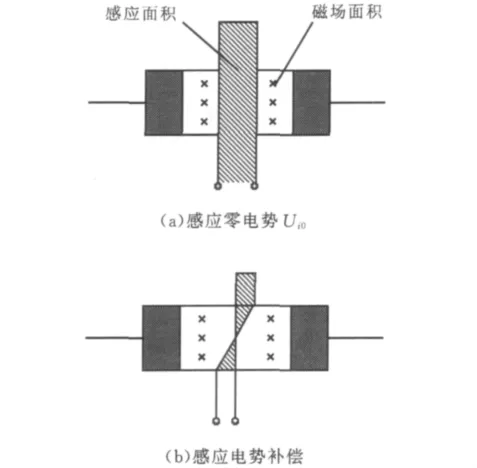
图2 感应电势及其补偿
3.4 自激场零电势
当霍尔电极通以控制电流时,此电流会产生磁场,这一磁场称为自激场(图3a).由于元件的左右两半场相等,故产生的电势方向相反,而相互抵消.实际应用时多为图3b所示的形状.由于控制电流引线也产生磁场,使元件左右两磁场强度不相等,因而有霍尔电势输出,这一输出电势称为自激场零电势.
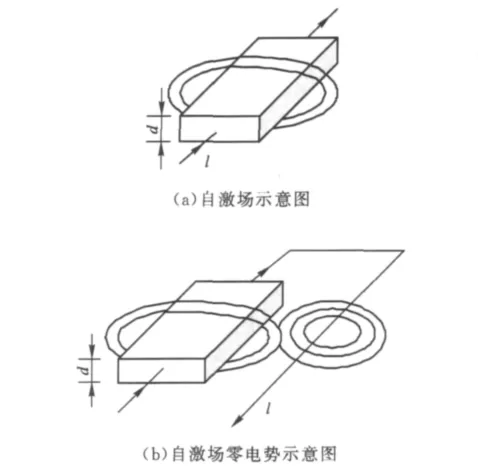
图3 自激场零电势示意图
要克服自激场零电势的影响,只要在安装过程中将控制电流予以合理安排.
[1]江铭波,阎旭东,徐国旺.霍尔效应及霍尔元件在物理检测中的应用[J].湖北工业大学学报 2011(2):142-144.
[2]钱显毅,唐国兴.传感器原理与检测技术[M].北京:机械工业出版社,2010.
[3]王桂荣,李宪芝.传感器原理及应用[M].北京 电力出版社,2010.
[4]苏 震.现代传感技术[M].北京:电子工业出版社,2010.
[5]孟立凡,蓝金辉.传感器原理及应用[M].北京:电子工业出版社,2008.
[6]刘爱华,满宝元.传感器原理与应用技术[M].北京:人民邮电出版社,2010.
