臂式输弹机构特性研究❋
2012-09-13曲振森薄玉成王惠源苏高峰
曲振森,薄玉成,王惠源,苏高峰,原 珏
(1.中北大学机电工程学院,山西太原 030051;2.中国兵器工业第202研究所,陕西咸阳 712099)
0 引 言
火炮的装填系统是提高火炮生存能力和战斗能力的关键技术之一,输弹机构有电驱动、液压、气动、机电液综合应用等形式[1-3],用输弹机构装填弹药可以减轻炮手的劳动强度,解决高角射击时人工装填困难的问题,还能够保证较好的装填一致性,有利于提高火炮的射击精度.臂式输弹机是一种结构紧凑、动作可靠、传动效率较高的输弹机构,鉴于输弹机构对弹丸装填的诸多有利因素,对臂式输弹机的工作特性研究将对输弹机构的设计和改进有着重要意义.
1 臂式输弹机的结构及工作原理
如图 1所示,太阳轮固定在弹丸托架侧板上且没有转动,摆臂的 a端与太阳轮连接且绕太阳轮中心转动,惰轮连接在输弹臂上且自由转动,行星轮连接在输弹臂的 b端且自由转动,输弹臂与行星轮固连且没有相对转动[4].
当在主动件上施加驱动力的时候,摆臂就绕太阳轮中心转动,通过齿轮间的啮合关系与合适的传动比,保证输弹臂的末端也就是输弹轮的中心始终在输弹中心线上运动,输弹机输弹动作的 3个关键位置如图 2所示.
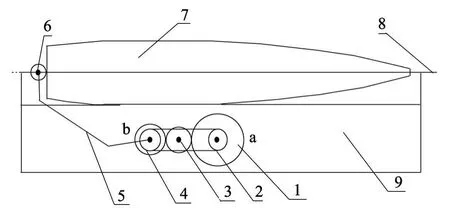
图 1 输弹机整体结构Fig.1 The overall structure of rammer
在输弹机的工作过程中,位置1是输弹机的初始位置;位置2时输弹机摆臂转动,此时输弹臂两端连线与摆臂中心线重合;位置3时输弹机摆臂转动,此时输弹臂末端到达在最大位置,推弹动作完成;之后输弹臂复位,如此往复完成输弹动作.
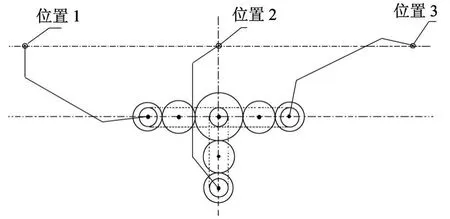
图 2 输弹机工作时的关键位置Fig.2 Key locations of rammer mov ement
2 输弹机构的运动学分析
简化输弹机构的原理模型,建立如图 3所示的直角坐标系,对输弹机构进行运动学分析[5-8].图中摆臂长 l1,输弹臂长 l2,e为输弹臂中心与输弹中心线的垂直距离,输弹臂与输弹中心线夹角为h,T为位置 1时摆臂与输弹臂的夹角,U为位置 2时摆臂转过的角度,θ为摆臂转动过程中与 x轴的瞬时夹角,V为摆臂与输弹臂的瞬时夹角.
由输弹机结构及工作原理,再结合图3可以得出,惰轮(o2)只起到传递转动和改变行星轮转动方向的作用,要保证输弹臂末端(A端)在输弹中心线上往复运动,就必须满足以下条件:
1)太阳轮(o1)与行星轮 (o3)的传动比满足

式中:k1为摆臂转动的角速度;k3为输弹臂绕圆心o3转动的角速度.
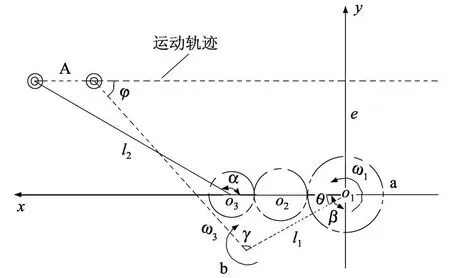
图 3 输弹机构运动简图Fig.3 Ramming kinematic diagram
2)输弹臂(l2)与摆臂长(l1)的长度满足

从图 3中可以得出

将式 (2)带入式 (3)有

令 l1/l2=λ,于是

当摆臂以k1的角速度绕 o1圆心转动时,输弹臂末端(A端)的运动方程为

对式 (6)求导可得 A端的速度方程

于是 A端速度的大小为

由图 3可知

由式 (1)得

联立式 (8)~(10),可得 A端的速度方程为

给定摆臂 l1=150 mm,λ=0.5,则输弹臂 l2=300 mm,初始夹角太阳齿轮与行星齿轮的传动比 i13=3∶ 5.当 k1=2 π rad/s时,输弹机构由位置1转动到位置 3所需的时间 t=0.5 s,取时间步长为 0.01 s,得到输弹臂 A端的速度特性曲线,如图 4所示.
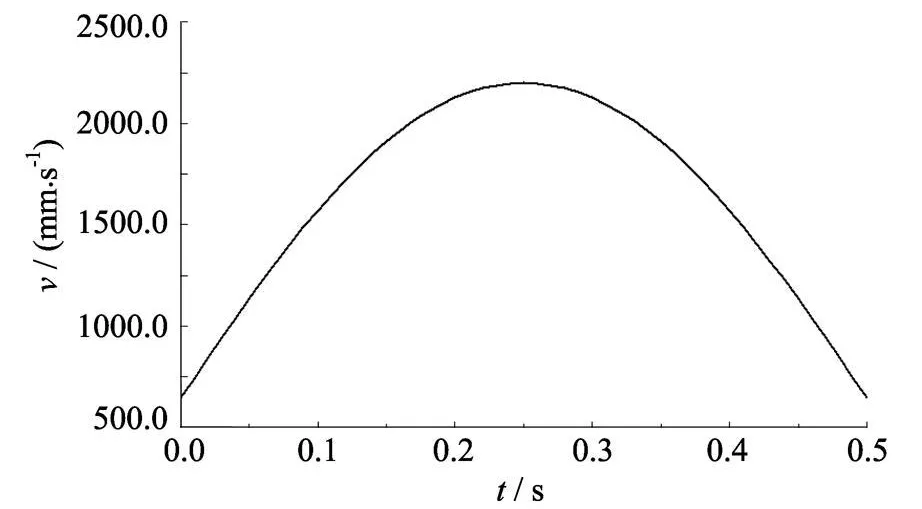
图4 输弹臂 A端速度特性曲线Fig.4 Velocity characteristic of A-side of transmission arm
从图 4中可以看出,输弹臂 A端的速度是由小到大逐渐增加到最大值后又开始逐渐减小,最大值出现在 t=0.25 s时刻,并以此为对称线对称分布,此时输弹臂到达位置2.
根据上述对输弹臂 A端速度曲线的分析,输弹机构在工作过程中可能会出现下述情况:
1)虽然输弹臂 A端的速度在中间时刻以后开始减小,但弹丸接触良好,没有与输弹臂脱离,也就是输弹臂在整个过程中始终作用于弹丸.
2)与第1)种情况不同,在中间时刻以后,由于输弹臂 A端的速度减小,弹丸与输弹臂脱离,输弹臂不再作用于弹丸,也就是输弹臂从位置2到位置3的动作是无效的.
3 输弹机构的仿真与分析
依据输弹机构的结构原理与第2部分给定的初始条件及计算所得的数值,建立了输弹机构的虚拟样机并导入仿真软件进行仿真[9-15],弹丸的质量近似为m=20 kg.
在其他条件相同的条件下,选择不同的k1的值进行仿真,k1的值分别为 2 π rad/s,3π rad/s, 4π rad/s.仿真的目的在于查看输弹过程中输弹机的运动机构,主要是输弹臂与弹丸的运动状态,得到输弹臂 A端和弹丸质心的速度及位移随时间的变化曲线,并根据仿真的结果,针对第2部分提出的问题,分析输弹过程中输弹臂末端与弹丸之间的接触情况.仿真结束后利用软件的后处理功能得到输弹臂末端与弹丸质心的 v-t曲线(如图 5所示)和 l-t曲线(如图 6所示),以及位移差值曲线(如图 7所示).
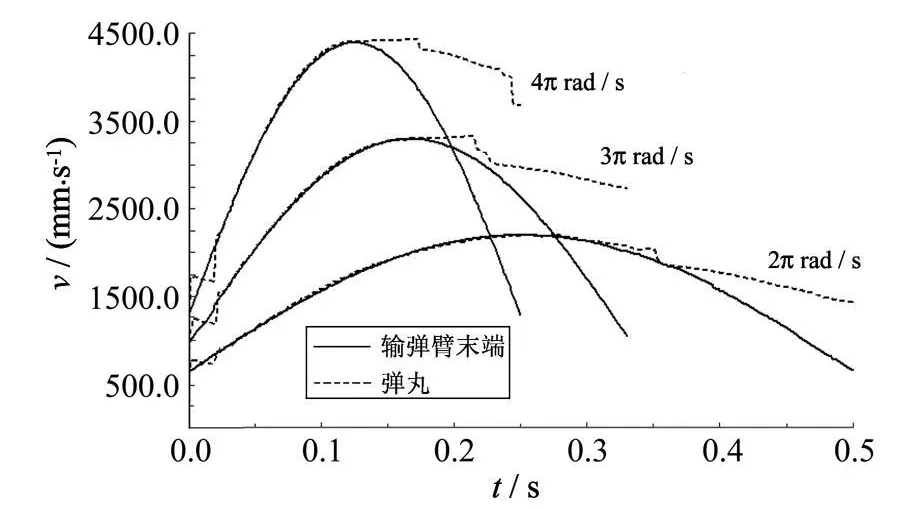
图5 k1不同时输弹臂末端与弹丸质心的速度曲线Fig.5 V elocities of transmission-arm A-sice and projectile centroid v s.k1
图5中实线表示输弹臂末端的速度随时间变化的曲线,虚线表示弹丸的速度随时间变化的曲线.图6中实线表示输弹臂末端的位移随时间的变化曲线,虚线表示弹丸位移随时间的变化曲线.

图6 k1不同时输弹臂末端与弹丸质心位移曲线Fig.6 Displacements of transmission-arm A-sice and projectile centroid v s.k1
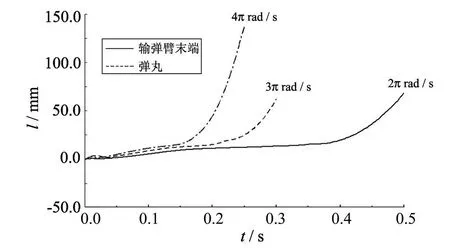
图7 k1不同时输弹臂末端与弹丸质心位移差值曲线Fig.7 D-v alue between the displacements of transmission-arm and centroid vs.k1
由图5可以看出,从运动开始到中间时刻,除了在起始阶段弹丸速度出现跳跃外,当弹丸速度开始稳定增加后,两条速度曲线基本上是重合的;在中间时刻输弹臂末端速度达到最大后,输弹臂末端的速度开始小于弹丸的速度,并且速度差逐渐增大,对于不同的k1,k1的值越大变化越明显.
从图 6,图 7中也可得知,从开始运动到中间时刻,弹丸位移曲线虽然在输弹臂位移曲线之上,但差距很小,基本重合;从中间时刻往后,弹丸的位移曲线与输弹臂末端的位移曲线出现了明显分离,位移差也逐渐增大;同理,对于不同的 k1,k1的值越大变化越明显.
综合对图 5~图 7的分析来看,中间时刻以前,输弹机构运动部分从位置1到达位置2的过程中,弹丸与输弹臂末端接触良好;在中间时刻以后,从位置 2到位置 3的过程中,弹丸会逐渐与输弹臂末端分离,输弹臂对弹丸的作用很小乃至没有作用,在这个阶段,输弹臂的作用对弹丸的加速基本无效,弹丸靠惯性继续运动.
4 结 论
臂式输弹机构工作时摆臂转过的最佳角度为90°,然后输弹臂复位,弹丸进入惯性行程.依据上述结论,为了减少输弹机构一个工作循环的时间和提高驱动能源的利用率,输弹机构运动部分的工作循环过程应该为:位置 1→位置 2→位置 1.
[1]梁辉,马春茂 ,潘江峰,等.大口径火炮弹药自动装填系统研发现状和趋势 [J].火炮发射与控制学报,2010(3):103-107.Ling Hui, MaChunmao, Pan Jiangfeng,etal.Current situation and development trend of autoloaderin large caliber howitzer[J].Journal of Gun Launch&Control,2010(3):103-107.(in Chinese)
[2]赵森,钱勇.自行火炮半自动装填机构输弹问题研究[J].兵工学报,2005(5):592-594.Zhao Sen,Qian Yong.Ammunition ramming of semiautomatic loading device of the self-propelled gun[J].Acta Armamentarii,2005(5):592-594.(in Chinese)
[3]徐达,林海,王东军.大口径顶置火炮输弹机动力学研究[J].装甲兵工程学院学报 ,2006(2):34-36.Xu Da,Lin Hai,WangDongjun. Research into dynamics of the large-caliber,top-mounted gun ram mechanism[J].Journal of Academy of Armored Force Engineering,2006(2):34-36.(in Chinese)
[4]Nordmann A,Germany H.Rammer for projectiles:united states,3,938,421[P].Foreign Application Priority Data,1976:2-13.
[5]李宗海.中大口径双管火炮自动装填系统方案研究[D].南京:南京理工大学,2009.
[6]樊永生,余红英.某自行火炮自动装填系统供弹机运动学分析 [J].华北工学院学报(自然科学版),1999,20(3):269-273.Fan Yongsheng, Yu Hongying. Thekinematics analysis of the ammunition supplying mechanism in the autoloading system of a self-ropelled gun[J].Journal ofNorth China Institute of Technology(Natural Science Edition),1999,20(3):269-273.(in Chinese)
[7]哈尔滨工业大学理论力学研究室.理论力学(I)[M].北京:高等教育出版社,2002.
[8]郑文纬,吴克坚.机械原理 [M].北京:高等教育出版社,1997.
[9]袁文武,蔡慧林.基于 U G和 ADAM S的齿轮啮合动力学仿真[J].煤矿机械,2010,31(2):40-42.Yuan Wenwu,Cai Huilin.Dynamic simulation of gear mesh based on UG and ADAMS[J].Coal Mine Machinery,2010,31(2):40-42.(in Chinese)
[10]高海龙,吴晓 ,李振华,等.柔性齿轮的多体动力学仿真方法研究 [J].制造业自动化,2009(10):103-106.Gao Hailong,Wu Xiao,Li Zhenhna,et al.Study on multi-body dynamics simulation of flexible gears[J].Manufacturering Autormation,2009(10):103-106.(in Chinese)
[11]李增刚.ADAM S入门详解与实例 [M].北京:国防工业出版社,2009.
[12]陈立平.机械系统动力学分析及 ADAM S应用教程[M].北京:清华大学出版社,2005.
[13]洪清泉.基于 ADAM S的多级齿轮传动系统动力学仿真 [J].北京理工大学学报,2003(12):690-693.Hong Qingquan.Dynamic simulation of multistage gear train system in ADAMS[J].Transactions of Beijing Institute of Technology,2003(12):690-693.(in Chinese)
[14]李伟,王兴贵,黄泽平.输弹机虚拟样机建模与动态仿真 [J].火炮发射与控制学报,2006(6):29-32.Li Wei,Wang Xinggui,HuangZeping.Modeling and dynamic simulation analysis for virtual prototype of rammer[J].Journal of Gun Launch& Control,2006(6):29-32.(in Chinese)
[15]李继科.火炮供输弹系统虚拟样机技术研究 [D].南京:南京理工大学,2004.
