Lokomat康复训练机器人对脑卒中患者步态及下肢关节角度的影响
2012-09-12李建民赵雅宁马素慧河北联合大学护理与康复学院河北唐山063000
刘 丹 李建民 赵雅宁 马素慧 郭 霞 (河北联合大学护理与康复学院,河北 唐山 063000)
脑卒中患者往往伴有偏瘫、失语等并发症,而异常步态是脑卒中患者的主要功能障碍,其恢复情况对患者步行能力及日常生活能力有很大的影响,严重影响了患者的生存质量。由于下肢肌无力、肌张力增高、患者控制力下降及感觉障碍,导致足下垂、内翻、踝膝关节不稳定和步行不对称等异常步态〔1,2〕。因此,提高患者独立步行能力,纠正步态,成为脑卒中后康复急需解决的问题之一。近年来应用机器人进行康复治疗这一新方法受到广泛关注,但其疗效目前少见报道。本文就Lokomat对脑卒中患者步态、步行能力及踝、膝关节角度的影响进行探讨。
1 资料与方法
1.1 一般资料 2009年5月至2011年5月在河北联合大学附属医院河北联合大学附属医院神经内科入住的脑卒中下肢运动功能障碍患者80例,随机分为对照组和干预组,每组40例。纳入标准:①经头颅CT或MRI确诊,疾病诊断符合1995年第四次全国脑血管病学术会议制定的诊断标准〔3〕;②病程小于3个月,生命体征稳定,血压控制良好,年龄30~75岁;③意识清楚,无认知障碍,能够充分理解治疗并能遵照执行;④有步行功能障碍,使用助行器能够步行5 m。排除标准:①其他引起步行功能障碍的情况,如既往有脊髓损伤、截肢、严重的下肢关节疾病或骨关节炎者,有共济失调症状的患者;②合并重大疾病者,如心、肺、肾等重要脏器功能减退或衰竭,控制不良的糖尿病等。两组患者的年龄、性别、病程、病变性质等差异无统计学意义(P>0.05)。见表1。
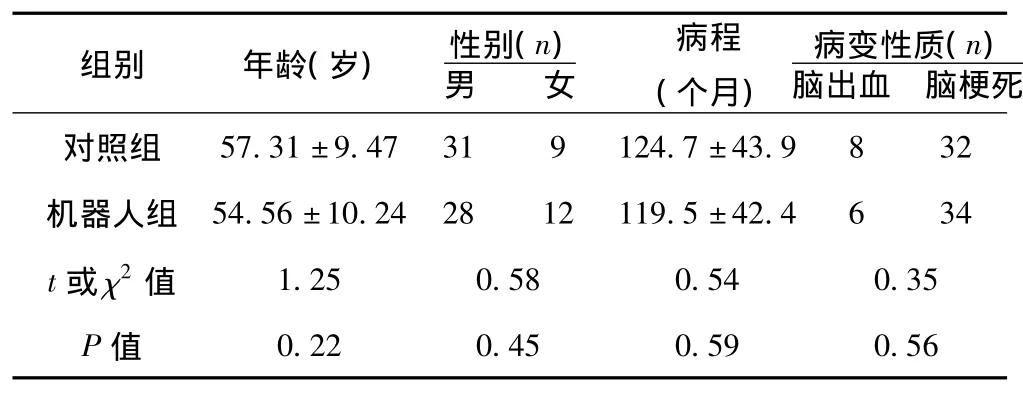
表1 两组患者一般资料比较
1.2 训练方法 对照组接受常规康复治疗,主要包括Bobath技术、PNF技术及运动再学习法,60 min/次,5次/w,共10 w。机器人干预组应用 Lokomat康复训练机器人,30 min/次,3次/w,共10 w(2个疗程)。初次训练时,减重为体重的60%,引导力为100%,速度1.2 km/h。训练过程中,根据患者身体情况进行减重范围、步态及速度的调整。
1.3 评价方法 ①Fugl-Meyer下肢运动功能评定;②Fugl-Meyer平衡功能评定〔4〕;③步频、步长和步速;④踝关节最大背屈角度和膝关节最大屈曲角度。
1.4 统计学分析 采用SPSS13.0统计软件进行统计学分析。计量资料以±s表示,采用 t检验;计数资料用 χ2检验,P<0.05为差异有统计学意义。
2 结果
治疗后干预组和对照组的步态和步行能力均有改善,各项评分均有提高。干预组治疗前后各项评分差异均非常显著(P<0.01);对照组治疗前后各项评分具有显著性差异(P<0.05);治疗后干预组各项评分与对照组相比具有显著性差异(P<0.05)。见表2。
表2 干预组和对照组治疗前后各指标比较(±s)

表2 干预组和对照组治疗前后各指标比较(±s)
与本组治疗前比较:1)P<0.01,2)P<0.05;与对照组治疗后比较:3)P<0.05
组别 n Fugl-Meyer运动功能Fugl-Meyer平衡功能步频(步/min)步长(cm)步速(m/s)踝关节最大背屈角度(°)膝关节最大屈曲角度(°)干预组 40 治疗前 14.43±2.85 6.40±2.12 62.37±16.74 33.61±7.86 0.43±0.12 7.11±4.45 43.72±11.56治疗后 27.12±3.381)3)8.76±2.321)3)82.31±19.381)3)42.01±11.091)3)0.75±0.211)3)25.34±6.831)3)64.21±8.471)3)对照组 40 治疗前 14.82±3.12 6.38±2.15 61.85±18.46 34.29±11.24 0.47±0.38 7.08±5.26 42.54±10.39治疗后 22.64±2.752) 12.64±2.682) 75.73±20.152) 39.64±8.532) 0.63±0.212) 16.48±7.152) 52.63±9.412)
3 讨论
提高步行速度、步行稳定性、步行效率是患者的首要需求,因此能否改善患者承重能力及纠正异常的运动模式是影响脑卒中患者康复效果的重要问题。患者早期有几个影响步态恢复的因素,如承重能力、平衡功能差及异常的运动模式严重等。Lokomat悬吊系统的设计能防止患者训练时腿部突然无力导致摔倒。当这种情况发生时,支撑系统随即发挥作用,以保证病人的安全。良好的平衡功能是下肢运动功能得以恢复的一个前提。跑台两侧设有扶手,悬吊时站立不稳,不能保持身平衡者可通过扶手保持平衡。患者足下垂导致下肢不能有效的摆离地面,踝关节不稳出现支撑不稳,膝过屈或过伸,表现为膝僵直,造成了下肢重心转移不充分,前进幅度减小,形成异常的步态〔5〕。Lokomat的减重系统减少脑卒中患者步行时身体重量对髋和腿部的负荷,使患者步行稳定性得到提高,增加了下肢关节的活动范围,缓解和改善由于负重导致下肢伸肌协同运动,避免了这种异常模式导致的足下垂、内翻等病理性步态从而促进患者恢复正常步态〔6〕,这一系统与减重步行训练原理相通。减重步行训练近年来研究比较多,各种研究都表明,经减重步行训练后,患者肢体运动功能明显提高。因此通过Lokomat训练同样能够达到减重训练时的效果。而Lokomat的减重大小可随患者恢复情况进行逐渐降低,使患者适应逐渐增加的负重,从而提高康复训练效率。目前应用矫形器纠正脑卒中患者异常步态的研究较多,其治疗效果已经得到公认〔7,8〕。Lokomat具备的步态矫正器与之功能相近,对患者的康复能够起到同样的疗效。在训练过程中Lokomat可以保持踝关节稳定性、矫正足下垂,促进足跟提前触地,使患者站立稳定,降低步行能量消耗〔9〕。Lokomat同时又具备微调功能,在训练中可通过调节患者系数、关节活动度、关节偏移范围这些参数,更符合理想运动程序,帮助患者省力高效地完成步行,有针对性也更加准确〔10〕。本研究表明,Lokomat步态康复训练机器人对脑卒中患者下肢运动功能恢复的疗效优于常规康复训练,值得推广应用。
1 李 翔,张雪艳,孙全义,等.脑卒中偏瘫后遗症期患者应用减重步行训练的临床研究〔J〕.中国康复理论与实践,2010;16(7):659-61.
2 Mitoma H,Hayashi R,Yanagisawa N,et al.Gait disturbances in patients with pontine medial tegmental lesions:clinical characteristics and gait analysis〔J〕.Arch Neurol,2000;57(7):1048-57.
3 全国第四届脑血管病学术会议.各类脑血管病诊断要点〔J〕.中华神经科杂志,1996;12(3):379-80.
4 南登崑,王宁华,岳寿伟,等.康复医学〔M〕.第4版.北京:人民卫生出社,2008:20-1.
5 孙 嘉,谭东升.脑卒中偏瘫患者步行功能的重建〔J〕.中国临床康复,2001;5(9):59.
6 Schmidt H,Werner C,Bernhardt R,et al.Gait rehabilitation machines based on programmable footplates〔J〕.J Neuro Engineering Rehabi,2007;4(2):1-7.
7 刘四文,刘海兵,唐 丹,等.矫形器结合功能训练改善患者步行能力〔J〕.中国康复理论与实践,2003;9(12):707-8.
8 李 哲,郭钢花,白 蓉,等.动态式踝足矫形器对偏瘫患者步行能力的影响〔J〕.中国康复医学杂志,2007;22(11):1018-9.
9 Thijssen DH,Paulus R,van Uden CJ,et al.Decreased energy cost and improved gait pattern using a new orthosis in persons with long-term stroke〔J〕.Arch Phys Med Rehabil,2007;88(1):181-6.
10 丁 敏,李建民,吴庆文,等.下肢步态康复机器人:研究进展及临床应用〔J〕.中国组织工程研究与临床康复,2010;14(35):6604-7.
