无轴承交替极永磁电机空载气隙磁场全局解析模型
2012-08-15章跃进仇志坚
李 琛 章跃进 仇志坚
(上海大学机电工程与自动化学院 上海 200072)
1 引言
传统永磁型无轴承电机以表贴式为主,另有插入式、埋入式、混合式等多种转子结构。但这些无轴承电机的悬浮控制都需事先获得转子的旋转位置角,故悬浮控制很大程度上受到转矩控制的影响,难以实现两者之间的真正解耦,为此日本学者提出了一种新型的无轴承交替极永磁电机[1]。与传统永磁型无轴承电机相比,交替极无轴承电机转子的永磁体内置,径向充磁并按同一极性排列,永磁体之间的铁心被磁化成沿径向方向的相反磁极,与永磁体磁极构成交替分布,如图1所示。该电机的悬浮控制无需转子的旋转位置角信息,能有效减小传统无轴承永磁同步电机转矩与悬浮性能之间的耦合效应[2]。
永磁电机二维气隙磁场可以采用有限元法或解析法求解。无轴承永磁电机气隙磁场十分复杂,由转矩绕组、悬浮绕组和永磁体三者产生的磁场叠加而成,以往研究多采用有限元法仿真计算。有限元法计算精度高,能较准确地获得叠加的复杂磁场,但优化设计须反复建模,计算耗时较长,转子转动会影响网格的剖分。而解析法物理概念清晰,可实现转子的自由转动。在电机设计初期,不考虑转矩绕组和悬浮绕组产生的磁场,解析法能初步判断电机参数是否满足气隙磁场要求,尺寸调整方便,计算量小、速度快。
二维解析法多用在表贴式永磁电机磁场解析中。文献[3,4]推导了表贴式永磁电机无槽解析模型,并用保角变换求得比磁导函数,将比磁导函数乘以无槽模型的气隙磁通密度表达式,拟合开槽对气隙磁场的影响。该模型无法考虑开槽对气隙磁通密度切向分量的影响;文献[5,6]分别用差分法计算定子槽各点的标量磁位和矢量磁位,与解析法结合计算表贴式永磁电机磁场;文献[7]则使用了等参元法代替差分法。数值解析结合法适用于各种复杂槽型,虽然计算速度比有限元法快,但计算精度受迭代次数制约;文献[8]采用直接解析法,利用表贴式永磁电机气隙区域、永磁体区域和槽区域之间的边界条件,由矢量磁位直接求解各区域气隙磁通密度表达式。
文献[9]使用标量磁位建立了内置式转子结构的永磁电机解析模型,本文在此基础上,采用矢量磁位求解交替极无轴承永磁电机空载气隙磁场,求得气隙磁通密度和空载感应电动势。由于矢量磁位适合于有电流区域,为定子开槽后电枢反应磁场分析的后续研究提供了便利,使全局解析模型的拓展性增强。
2 解析模型
为便于数学建模,做如下假设:
(1)永磁体径向充磁,退磁曲线呈线性,相对磁导率μr=1。
(2)忽略电机端部效应和饱和效应。
(3)定、转子铁心磁导率无穷大。
(4)定子槽为径向扇形槽,空载情况下不考虑悬浮绕组和转矩绕组产生的磁场。
(5)转子不偏心,气隙长度各处均匀。
本文采用一台极对数 p=4(四个 N极)、槽数Q=24的无轴承交替极永磁电机为分析对象,二维极坐标系下解析模型及子区域划分如图1所示。Rout、Rin分别为定子外径、转子内径,Rsy为定子槽底半径,Rs、Rr分别为定子内径、转子外径,hm为永磁体厚度,永磁体内径 Rm=Rr-hm,θi、θj分别为第 i槽和第j磁极距初始位置角度,α 和β 分别为永磁体宽和槽宽(弧度)。将解析区域划分为区域Ⅰ(气隙)、区域Ⅱ(永磁体 j=1,2,…,p)和区域Ⅲ(槽i=1,2,…,Q)。

图1 无轴承交替极永磁电机模型Fig.1 Consequent-pole permanent magnet bearingless motor topology
图2为永磁体径向磁化强度分布示意图,其中Br为永磁体剩磁,θ0为转子旋转位置角,μ0为空气磁导率。依据上述假设条件,由图2得到极坐标系下磁化强度傅里叶展开表达式[9]:
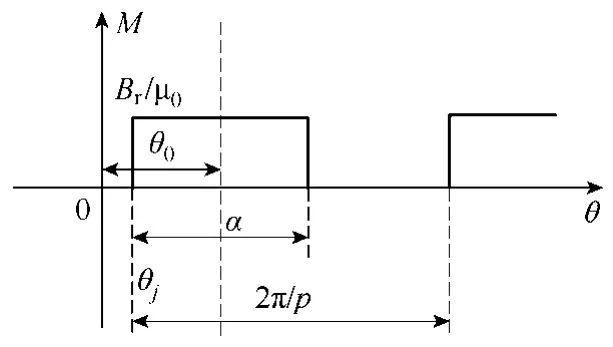
图2 径向磁化强度分布Fig.2 Radial magnetization
m——永磁区域磁场谐波次数;
θ1——定子槽与初始位置夹角,本文中θ1为零。
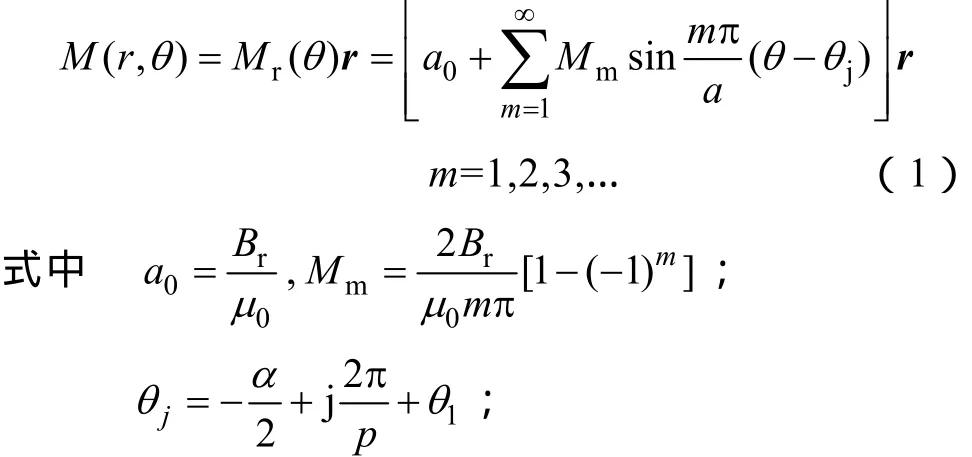
极坐标系下各子区域矢量磁位满足拉普拉斯方程和泊松方程。
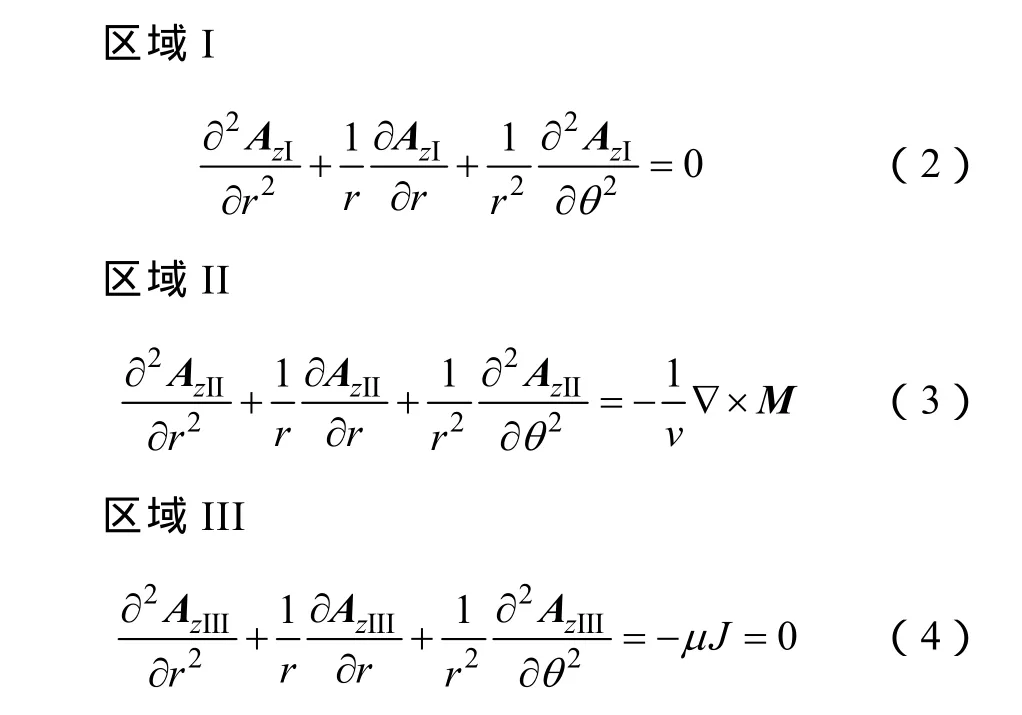
式中,AzI、AzII、AzIII分别为气隙、永磁体和槽内的矢量磁位。
方程的边界条件为

式中 H——磁场强度;
B—— 磁通密度;
下标θ—— 切向分量;
下标r—— 径向分量;
I,II,III—— 气隙、永磁体、槽区域;
i,j—— 第 i槽和第 j磁极。
3 解析表达式
3.1 气隙区域解
极坐标系下气隙区域矢量磁位AzI满足拉普拉斯方程(2),由分离变量法求得气隙区域矢量磁位解[10]
式中,n——气隙区域磁场谐波次数。
3.2 永磁区域解
3.3 定子槽区域解
由于采用了扇形槽模型,简化了槽区域边界条件,便于其矢量磁位拉普拉斯方程的求解。空载时极坐标系下第 i槽的矢量磁位满足拉普拉斯方程(4),其表达式为[8]
3.4 边界条件方程式
由以上各子区域矢量磁位表达式可求得磁通密度和磁场强度的径向、切向表达式。
径向磁通密度

首先,在r=Rm处,由边界条件(7)可得方程式

其次,由边界条件式(5)、式(6)、式(9)、式(10),沿整个气隙圆周对切向磁场强度积分,可得

再次,由边界条件(11),沿每块永磁体区域对径向磁通密度积分,有
最后,由槽口磁位连续,沿槽口区域对矢量磁位积分,如下
4 空载感应电动势计算
本文空载感应电动势计算采用磁链微分法

式中 ω——机械角速度。
无轴承电机有两套绕组,假设转矩绕组和悬浮绕组线圈在槽内均匀分布,分左右两层。以悬浮绕组为例,每个绕组的磁链为

通过计算转子在不同时刻的绕组磁链,可获得转子位置角与各相绕组磁链之间的函数波形,再通过磁链微分法求得转子在任意速度旋转时各相绕组的感应电动势。
5 解析与有限元分析结果比较
为检验无轴承交替极永磁电机全局解析模型的准确性,本文使用Ansoft有限元分析软件,对一台4极24槽交替极永磁转子结构的无轴承电机二维建模,将有限元分析结果与解析计算结果的磁通密度波形和空载感应电动势作比较。电机模型参数见下表。
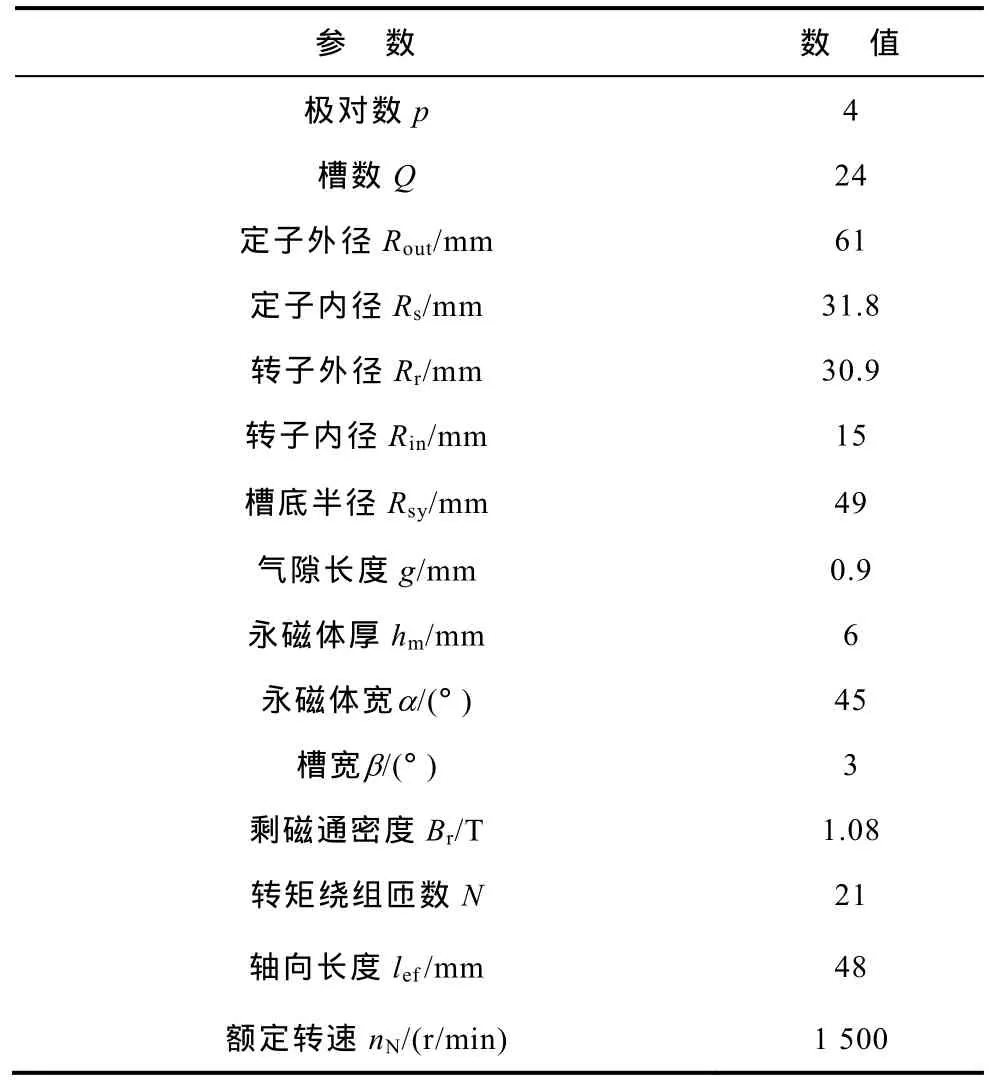
表 电机模型参数Tab.Parameters of the motor model
图3a所示为 r=(Rr+Rs)/2处气隙磁通密度解析结果和有限元分析结果的比较,其中 Bra、Bta分别为径向磁通密度、切向磁通密度的解析值;Brf、Btf分别为径向磁通密度、切向磁通密度的有限元分析值。在交替极永磁转子结构中,永磁体区域径向磁通密度最大可达0.8T,铁心区域径向磁通密度最大可达0.7T。值得注意的是,解析法忽略了饱和效应,所以解析波形的幅值比有限元分析波形稍大,但总体而言吻合度较高,说明解析法应用在无轴承永磁电机气隙磁场计算中是可靠的。图3b所示为定子槽处放大磁通密度波形。定子开槽处解析波形与有限元波形比较吻合,说明全局解析模型精确计及定子开槽对气隙磁场的影响,在耗时短、操作灵活的前提下,在定子槽处取得了与有限元分析相吻合的计算结果,体现了该解析模型计算开槽影响时的优势。
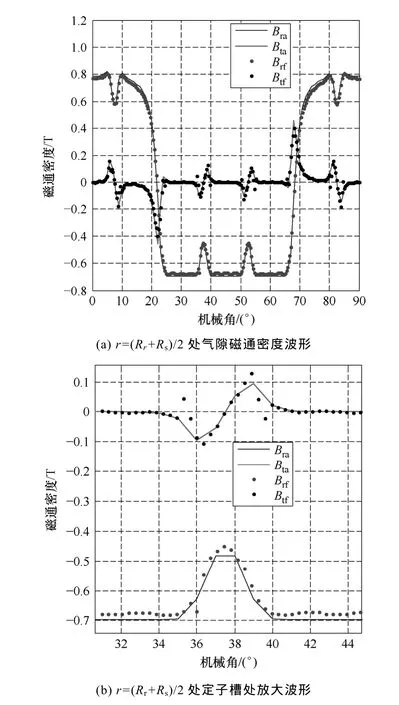
图3 气隙磁场磁通密度波形比较Fig.3 Comparison of flux density waveforms in the middle of the air-gap
图4a为无轴承交替极永磁电机在额定转速nN=1 500r/min下,悬浮绕组三相磁链解析计算波形,其幅值相等,各相相位相差 120°。图 4b所示为悬浮绕组各相空载感应电动势解析计算波形。

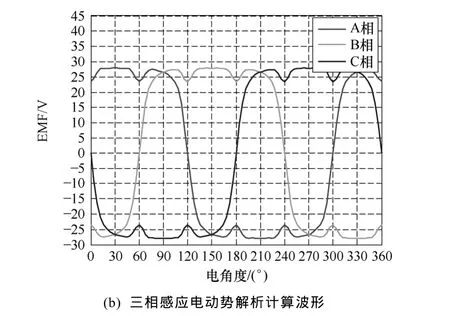
图4 三相磁链和感应电动势解析计算波形Fig.4 Analytical waveforms of flux linkage and EMF in phase windings
图5所示为C相悬浮绕组感应电动势解析计算结果与有限元结果的比较。由图可见,解析计算感应电动势幅值和相位都与有限元分析较为一致。
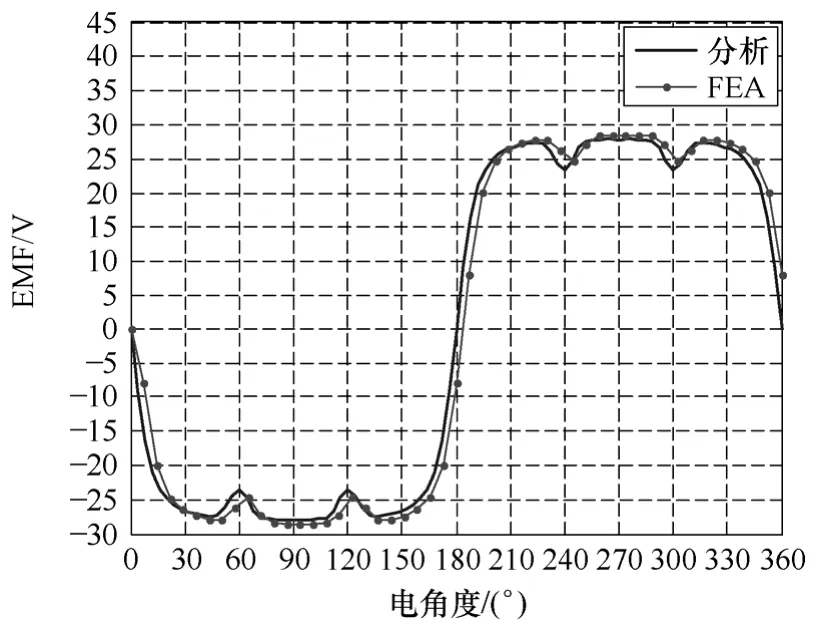
图5 相绕组感应电动势解析计算与有限元分析波形比较Fig.5 Comparison of analytical and FEA predicited EMF waveforms in phase C winding
6 结论
本文建立了无轴承交替极永磁电机全局解析模型,首次运用二维解析法求解无轴承电机气隙磁场。气隙磁通密度和相感应电动势的解析计算结果与有限元分析结果相吻合,证明了全局解析模型的正确性和有效性。该模型考虑了永磁体内置和定子开槽对气隙磁场的影响,适用于各类具有交替极永磁转子结构的电机,为无轴承交替极永磁电机本体结构优化设计提供了便利。
附 录
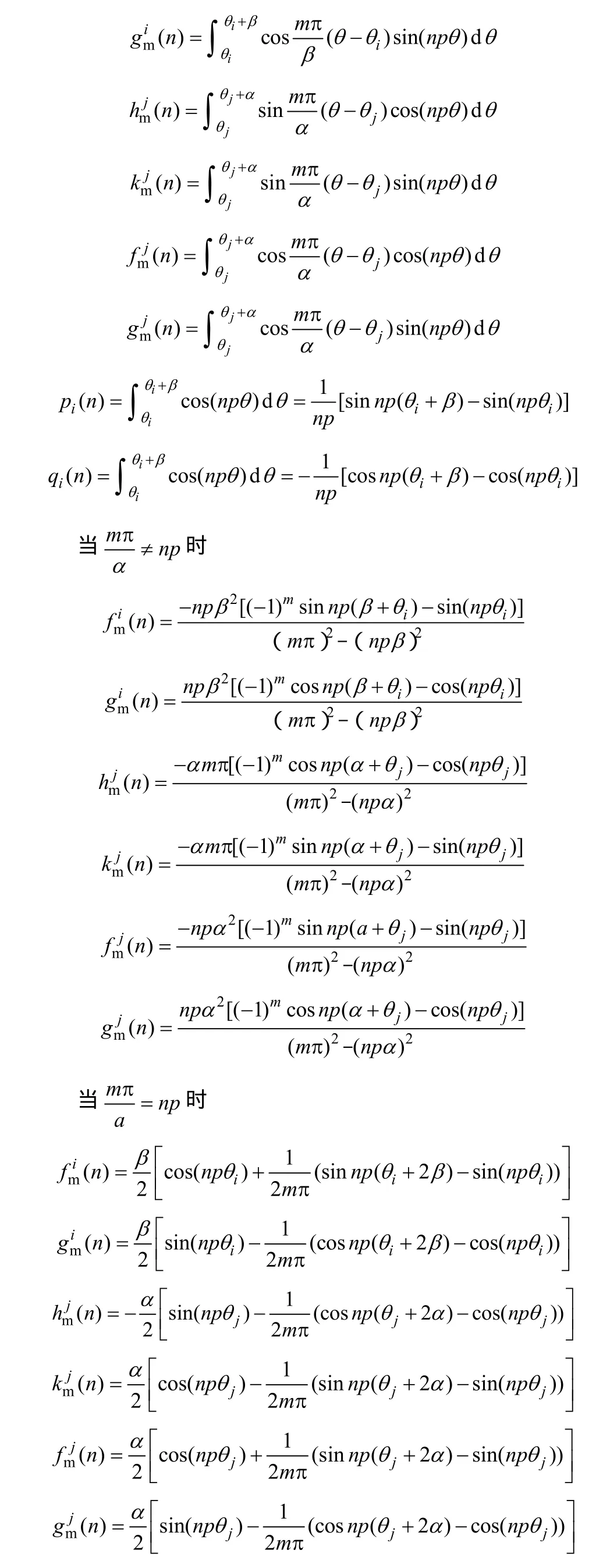
1.积分表达式

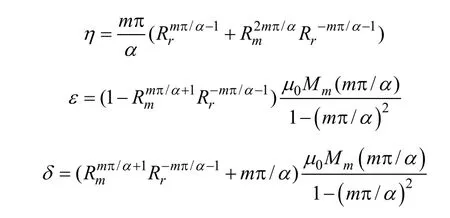
2.中间变量

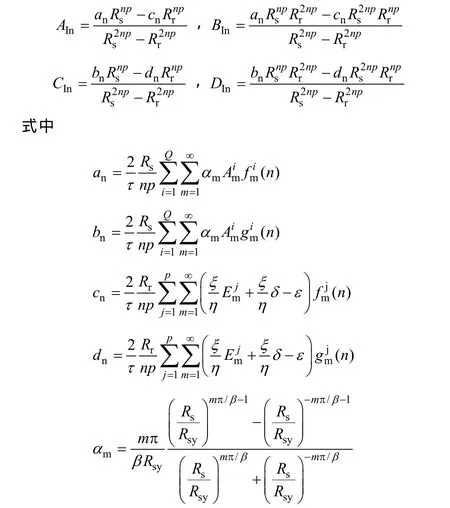
3.气隙区域I矢量磁位表达式系数


[1]Takenaga T, Kubota Y, Chiba A.A principle and a design of a consequent-pole bearingless motor[C].Proceedings of the 8th Int.Symp.Magnetic Bearings,2002: 259-264.
[2]仇志坚, 邓智泉, 王晓琳, 等.新型交替极无轴承永磁电机的原理与实现[J].中国电机工程学报,2007, 27(33): 1-5.Qiu Zhijian, Deng Zhiquan, Wang Xiaolin, et al.The principle and implementation of a new-type consequentpole bearingless permanent magnet motor[J].Proceedings of the CSEE, 2007, 27(33): 1-5.
[3]Zhu Z Q, Howe D, Bolte E.Instantaneous magnetic field distribution in brushless permanent magnet DC motors, part I: open-circuit field[J].IEEE Transactions on Magnetics, 1993, 29(1): 124-135.
[4]Zhu Z Q, Howe D.Instantaneous magnetic field distribution in brushless magnet DC motors, part III effect of stator slotting[J].IEEE Transactions on Magnetics, 1993, 29(1): 143-151.
[5]丁晔, 章跃进.表面磁钢永磁无刷电机空载气隙磁场半解析法研究[J].电机与控制应用, 2007(3):7-10.Ding Ye, Zhang Yuejin.Semi-analytical method research for non-load air gap field of surface alnico permanent magnet brushless motor[J].Electric Machine and Control Application, 2007(3): 7-10.
[6]郑成勇, 章跃进, 薛波.表贴式分数槽电机永磁气隙磁场矢量位半解析法[J].微特电机, 2010(4): 24-26.Zheng Chengyong, Zhang Yuejin, et al.Semi–analytical approach with vector magnetic potential for permanet-magnet air-gap field of surface mounted stator slot[J].Small and Special Electrical Machines,2010(4): 24-26.
[7]李春江, 章跃进, 卢铁斌.解析数值结合法在直驱轮毂式永磁无刷电机气隙磁场分析中的应用[J].微电机, 2010, 43(12): 21-28.Li Chunjiang, Zhang Yuejin, Lu Tiebin.Application of analytical-numerical method to air-gap magnetic field of direct drive wheel-hub permanent magnet brushless motors[J].Micromotors, 2010, 43(12):21-28.
[8]Thierry Lubin, Smail Mezani, Abderrezak Rezzoug.Exact analytical method for magnetic field computation in the air gap of cylindrical electrical machines considering slotting effects[J].IEEE Transactions on Magnetics, 2010, 46(4): 1092-1099.
[9]Linni Jian, K T Chau, Yu Gong, et al.Analytical calculation of magnetic field in surface-inset permanent magnet motors[J].IEEE Transactions on Magnetics, 2009, 45(10): 4688-4691.
[10]胡之光, 电机电磁场的分析与计算[M].北京: 机械工业出版社, 1986.