多逆变器环境微网环流控制新方法
2012-08-07吕志鹏蒋雯倩徐欣慰
吕志鹏 罗 安 蒋雯倩 徐欣慰
(1.湖南大学电气与信息工程学院 长沙 410082 2.广西电网电力科学研究院 南宁 530023)
1 引言
随着我国智能电网研究的深入,作为特高压电网的有效补充,包含多种能源形式和产出形式的微网得到了越来越多的关注[1-2],微源并网逆变器的大量存在构成了多逆变器环境,微网内能源形式多样、等效输出阻抗和额定容量也有差异,外特性的差异使得多逆变器环境下的负荷功率不能按照微源额定容量比例分配,环流问题亟待解决,孤岛运行和负载突变的情况下更需重视。
功率/下垂控制是实现多机稳定并联的主要控制策略,移动有差调节特性可以实现负荷功率按照单位容量均分,这在外特性相同的微源间是适用的,考虑多能互补的微网构造,其中既包括类同步机形式的微源如各种涡轮机等,也有众多逆变型微源,额定功率、下垂特性、等效输出阻抗各不相同,类同步机微源调度快,功率输出平稳,可作为大的储备电源来调用,并可作为基准电源有效调节配/微网的频率和电压,而基于逆变器并网的微源由于逆变器的钳制作用、功率计算低通滤波环节引起的控制滞后和闭环控制技术的采用不具备涡轮机微源一样的快速跟踪特性;其次,由于并联逆变器设计连线阻抗以及闭环控制器参数与输出功率存在制约关系,即使输出电压幅值和相位完全相同,按照传统的功率下垂控制法也难以实现功率精确均分和环流抑制,鲁棒性能较差。
综合以上考虑,在对微网逆变型微源的控制建模方式上如能尽量接近类同步机微源,使其能够体现同步发电机的优良特性,同时克服输出功率和输出阻抗的制约影响,改善因功率计算环节带来的滞后作用,迅速地跟踪配/微网的动态变化,便能有效解决微网内不同微源间失步的问题,从而有效抑制环流。通过控制算法的改进可以使得逆变器能按照同步发电机运行方式运行,称为“同步逆变器”技术[6],或“虚拟同步发电机”技术,与传统功率/下垂控制方法相比[7-8],同步逆变器技术可使逆变器表现同步发电机的优良性能,控制简单,对配网具备天然的友好性,有利于逆变型电源的可靠运行和提高电能质量。
本文在对比传统功率/下垂控制方法基础上,具体分析了虚拟同步发电机控制对改善多逆变器功率分配的原理,同时为了克服功率计算环节引起的控制滞后和降低空载环流,重新设计了下垂控制系数,改善下垂控制的动态性能,抑制了在负载突变和运行模式转换条件下的环流放大,搭建小型微网,进行了两台逆变器实验样机互联实验,仿真和实验证明了基于虚拟同步发电机模型和改进下垂控制器的采用对改善负荷功率分配、降低空载环流以及提高跟踪速度方面具有优势。
2 多机并联系统功率分析
2.1 系统功率分配机理
以图 1所示逆变器并联模型进行系统功率分析,把逆变器等效为一个有内阻的电压源,其中UA、UB、U0分别为微源 A逆变器出线电压、微源 B逆变器出线电压、交流并联母线电压,微源A、B逆变器的输出阻抗和连线阻抗之和等效表示为Rn+jXn=Zn∠φZn(n = A,B),其中φA、φB分别为微源 A、B的输出电压相位,φZA、φZB为等效输出阻抗的相位。
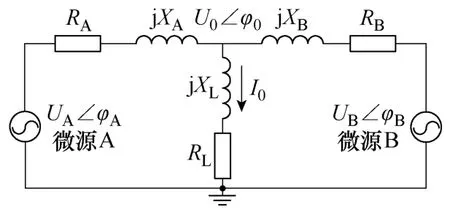
图1 多机并联模型Fig.1 Model for paralleled operation of micro-sources

根据方程组(1)可得输出的有功功率和无功功率与输出电压幅值和频率( ω=dφ /dt )都有关,并且因线路阻抗参数差异和闭环控制技术的采用,等效输出阻抗角的变化决定功率下垂控制方程的形式,表1所示依次为等效输出为近似感性、近似阻性以及普通感性阻性混合型时对应的功率表达式和下垂控制方程。

表1 功率表达式和下垂控制方程Tab.1 Power expressions and drooping control equations
以等效输出阻抗呈感性为例进行分析,下垂控制方程可通过如图2所示结构实现,首先测量逆变型微源输出的电压和电流,计算输出的平均功率(包括低通滤波环节),输出平均功率与功率设定参考值比较后通过下垂控制器得到逆变器输出的角频率和电压幅值,mn、nm分别为有功/频率(P/f)下垂系数和无功/电压(Q/V)下垂系数,可根据电力系统约束的频率电压波动范围选择。
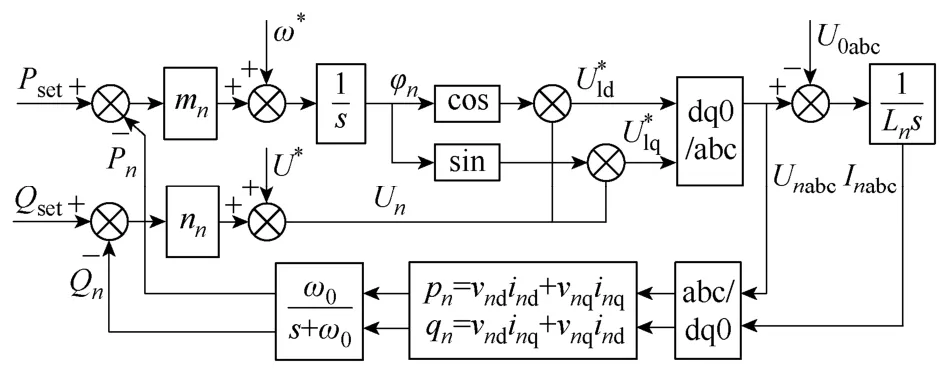
图2 传统功率/下垂控制器Fig.2 The traditional power droop control principle
这样的控制方式可实现微网电源间功率分配并保证系统电压和频率稳定,通常还设计电压电流环控制器用于改善电压输出性能。电压电流闭环控制的采用易于等效输出阻抗的设计,可以使得输出阻抗呈感性、阻性或感阻性混合。
2.2 系统有功和无功功率环流分析
以感性等效线路阻抗为例说明,在包括不同额定容量微源的微网中,环流大小是衡量系统功率分配精度的重要指标,如果能按照额定容量比例k精确分配负荷功率,则并联系统可稳定运行并同时抑制环流。定义式(2)、式(3)为并联系统有功和无功环流表达式,其中k为微源间额定容量比例系数。实际体现为通过设计控制器获得的等效输出阻抗比。

由式(2)、式(3)可得,如果通过控制器设计能使得逆变器 A和 B等效阻抗成比例 1∶k、输出电压幅值 UA、UB相等、相位相同,便能较好地实现功率分配。
实际上,特别是在辐射状微网线路阻抗差异较大的情况下,线路阻抗与无功功率存在较强的联系,在不解除此联系的条件下,即便设计等效输出阻抗成比例也不能实现功率按比例分配,从而不能有效抑制环流,这就首先需要重新设计控制器来解除无功功率和线路阻抗间的制约关系,再通过“虚拟阻抗法”等方法设计闭环控制器获得按比例设计的等效输出阻抗,从而实现功率均分。
2.3 等效输出阻抗差异对功率分配的影响
由式(1)可得,等效线路阻抗为感性时,微源输出有功和无功功率的表达式为

根据下垂控制方程

可得如图3所示P-f、Q-V控制框图。

图3 P-f, Q-V控制原理Fig.3 P-f, Q-V control principle
由图3可得逆变器有功功率和无功功率的表达式为
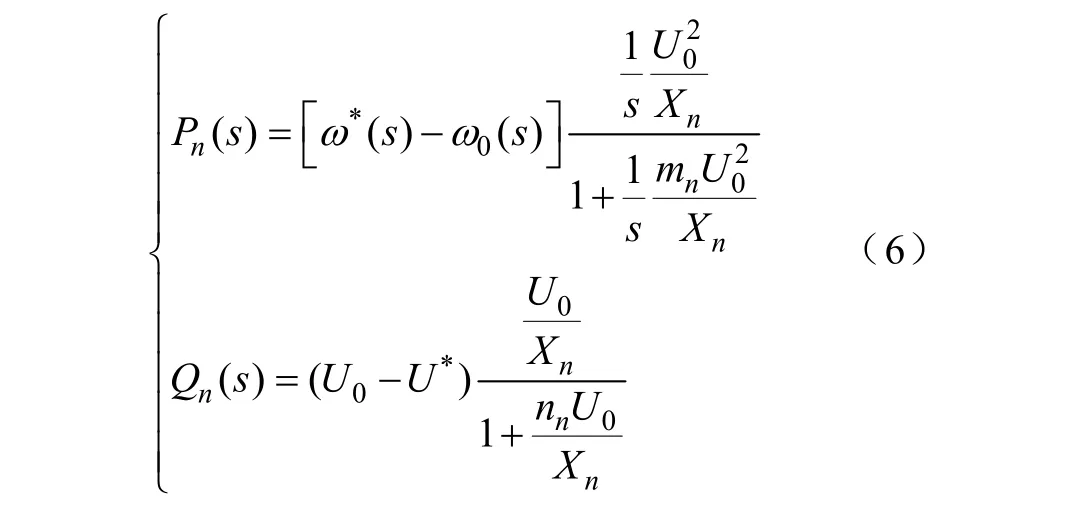
与图2所示功率控制框图相对应,式中*ω为空载角频率;0ω为公共母线角频率;*U 为空载输出电压;U0为公共交流母线电压。
分析上式可得,因积分项的存在,稳态时逆变器输出的有功功率与等效连接阻抗Xn无关,即使各逆变器等效线路阻抗各不相同,通过下垂控制机制,并联运行的逆变器输出的有功功率仍能实现精确功率分配;稳态时无功功率输出则与等效连接阻抗相关,因其传递函数在整个频带范围内的增益都包括Xn,所以逆变器输出的无功功率随着等效线路阻抗的变化而变化,并且易受谐波注入的影响,无法实现无功功率按比例k分配,这种功率分配策略鲁棒性较差,难以实现精确的无功功率分配。
3 虚拟同步发电机逆变器功率分析
假设采用的同步发电机模型参数为:极对数p=1。设定子绕组自感为 L,互感为 - M(M >0),励磁电抗阻感值为 Rf、Lf,励磁绕组和定子绕组间互感Mf随电角度θ 的改变而变化,if为励磁电流,表示内积,电角速度 ωn=dθ/dt ,J是转动惯量,Tm是机械转矩,Te是电磁转矩,DP是阻尼系数,E是旋转动能,电角度θ=pθm。
本文直接给出同步逆变器的主要控制方程式(7)~式(10):
感应电动势表达式

假设励磁电流恒定,式(7)简化为

同步发电机机械模型

电磁转矩表达式

系统有功功率和无功功率表达式
以三相桥臂和三相 LC滤波器构成的逆变器为例分析,直流侧连接微源,具有一定的功率储备。将同步发电机的电气模型和机械模型应用于逆变器控制,其中,逆变器输出端电压Un与感应电动势e对应,输出电感电流In与定子输出电流i对应,输出滤波器阻感Rs和Ls与励磁绕组的阻感对应。
根据式(7)~式(10)得控制器框图如图 4所示,其中refω为额定电角速度,nω为实际计算获得的电角速度。选用适当输出滤波器参数 Ls和 Rs代替同步发电机的转子阻抗。通过 PWM控制逆变器输出以使Un在一个开关周期的平均值等于式(7)中的e即完成了模拟同步机运行的控制器设计。同时经过仿真和实验发现,参数设计不必考虑实际电机系统的设计规范,采用适合系统容量的滤波和连接电抗参数即可。

图4 模拟同步发电机运行的微源控制器软件部分Fig.4 The software part of the controller
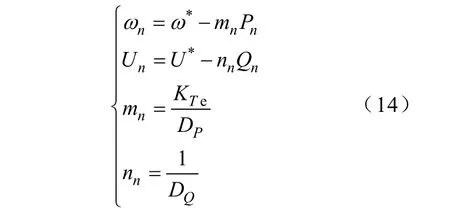
对于同步发电机,转子旋转速度是受原动机约束的,阻尼系数DP与机械摩擦等因素密切相关。根据同步发电机输出的有功功率下调频率是使其均匀分担负载的一种重要方法。实际中同步机的运行过程是当有功功率需求增加时,原动机的转速下降,原动机调速系统将增加机械功率输出。这可以通过把实际角速度ωn与额定角速度ωref(取空载电压角频率*ω)作比较后再馈送到阻尼模块DP来模拟,如图4所示,阻尼因子DP实际上表现为频率下垂系数,定义为所需求的转矩改变量与角速度改变量的比,如下式

机械转矩Tm可以用有功功率设定值Pset除以额定机械角速度获得。这构成了有功功率的控制环,如图4的上半部分。稳态时,ωΔ为0,按照功率设定值运行,当频率发生变动时,则频率下垂机制使得微源可以自动调频分担同一条母线的负载有功。
无功功率Q的调整可以用相似的方法来实现。将电压下垂系数定义为所需求无功功率的变化量ΔQ与电压变化量ΔU的比值,与同步发电机的无功调节特性相似,即

式中,Qn为额定的无功功率,可选择标称功率;Un为额定端电压的幅值。图4的下半部分是无功/电压控制环。在与无功功率设定值和实时无功功率差值叠加前,额定电压幅值Uref(取空载运行电压*U)与端电压Un的差值经DQ环节后被送到增益为K的积分器中,以产生Mfif信号。稳态时ΔU为0,按照无功设定值运行,当并网连接点处电压发生变化时,电压下垂机制使得微源可以自动调整无功以追踪母线电压。
采用同步发电机机电暂态方程建模,并以其体现感性阻抗特性为例简化分析,可得微源逆变器输出有功和无功功率的表达式为

根据下垂控制方程,KTe为功率到转矩的换算系数,则
易得无功控制部分因为构造了积分器 K/s用于产生Mfif信号,无功功率部分传递函数为

与式(6)相比,基于同步发电机模型的无功功率方程因同样存在积分项,稳态时逆变器输出的无功功率与等效连接阻抗Xn无关,并联运行的逆变器输出的无功功率能够实现精确功率分配。
可见,无功功率的输出与等效输出阻抗解除了制约关系,克服了传统下垂控制法中无功功率易受等效线路阻抗变化的弊端,有较强的鲁棒性,其传递函数在整个频带范围内的增益都与 Xn无关,这种功率分配策略可以实现精确的无功功率分配。
4 改进下垂控制器设计
通过虚拟同步发电机设计解除无功功率与等效输出阻抗间的联系之后,可以通过重新设计闭环控制器使等效输出阻抗成比例,以满足稳态环流控制和单位功率均分的要求,参见方程式(2)和式(3)。根据下垂控制方程式(5),不同容量的微源并联运行并按单位容量均分负荷,稳态下的输出功率还应满足

如果上述条件都能满足,则理论上不同额定容量并联微网中空载环流可以完全消除并且负载功率可以按照单位功率均分,如图5所示,两台逆变器按照ωA,UA和ωB,UB两条下垂特性曲线运行,并有 mA/mB= nA/nB= SA/SB, Sn(n = A,B,… )为视在功率,但实际中下垂控制系数需要根据电力系统规定的电压和频率波动范围进行设计,根据国标GB12326—90电能质量——电压允许波动和闪变,电压波动范围需在2.5%以内,实际设计中并联运行的逆变器下垂控制系数相近,不满足额定容量比,从而不能满足式(16),即

如果不能保证式(16),则由式(14)和式(17)可知,若仍要满足按单位容量均分负荷,则要抬升功率输出大的微源的空载电压和频率点,如图5所示,两台逆变器按照AA,Uω′′和BB,Uω′′两条下垂特性曲线运行,下垂系数近似相等,输出功率大的逆变器输出电压和频率较功率输出小的逆变器差值增大,使空载环流不能消除。为满足负载均分,同时降低电压和频率差值,减少空载环流,可在国标规定的电压和频率波动范围内,对下垂控制系数进行小的修正,使输出功率大的逆变器电压幅值和频率下垂系数取小些,而输出功率较小的微源逆变器下垂系数取大些或不变,使并联逆变器有相近的空载电压运行点,从而尽量兼顾下垂均分特性、设计参数范围以及空载环流要求。

图5 不同容量逆变器下垂控制特性Fig.5 The characteristic curves of frequency and voltage droop
同时为了降低功率计算环节低通滤波器对系统性能的影响,补偿功率计算滞后,提高系统响应速度,引入微分补偿环节。重新设计的下垂控制器如

式中,gP, gQ为下垂控制器修正系数,需要根据逆变器额定功率大小和国标规定的电压和频率波动范围综合选择,mnd, nnd为微分补偿环节系数。
5 仿真和实验
对含两台基于虚拟同步发电机模型的逆变微源功率控制器进行了仿真,仿真参数:滤波电抗LSA= 1.2mH ,LSB= 0.6mH ,滤波电容 C= 1500μF ,J=0.01kg•m2,K=13580,额定功率100W和200W,运行频率 50Hz,连接电抗为 0.0534mH,采用Matlab/Simulink 2010a,仿真过程为:两台同步逆变器通过断路器和升压变压器连入电网。采用传统下垂控制和改进下垂控制进行两次仿真,首先观测单台逆变器的频率输出、电压输出和功率输出动态特性,逆变器在t =0.5s时并入电网,在t =1s时发出有功60W,无功50var,在t =2s时下垂控制,设定DPA=0.56,DQA=1000,DPB=0.60,DQB=1200,在t=3s时使电网电压下降5%,在t =4s时联网模式转为孤岛模式,t =5s时半载转满载,采用改进下垂控制器重复上述步骤并观测环流,设置mnd=2,nnd=2,对200W微源gP和gQ设计为0.96、100W微源下垂系数不做变动。
仿真结果如图6所示。图6a和图6b为传统下垂控制和改进下垂控制器的单台逆变器输出频率控制波形,图6c和图6d为各工况输出电压波形对比,图6e和图6f为各工况逆变器输出有功和无功功率波形对比,图6g和图6h为连接电抗上的环流大小对比。由图可见,虚拟同步发电机控制模型和改进下垂控制器的采用使得环流抑制效果更好,在输出频率、电压以及功率动态响应上都明显优于传统下垂控制法,模式切换和负荷变动条件下环流问题得到改善,证明没有过多的潮流消耗在两逆变器连接线路阻抗上,改善了负荷功率分配。

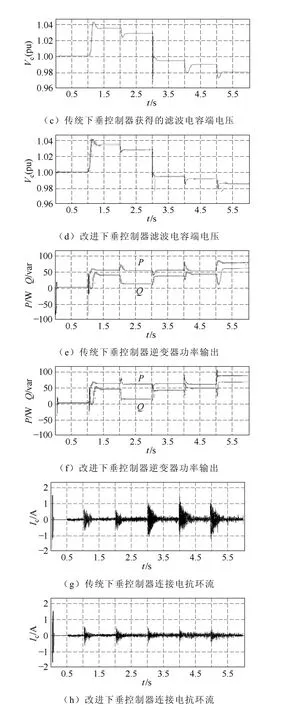
图6 仿真波形Fig.6 Simulation waveforms
根据前文所建立的模拟同步发电机运行的微源并网逆变器结构模型,利用实验室光伏平台和蓄电池组制作两台样机,并接入动模实验室,组成微网系统,如图7所示。由于升压斩波和充放电控制与本文控制器设计关系不大并且属于成熟的设计思路,不再赘述。
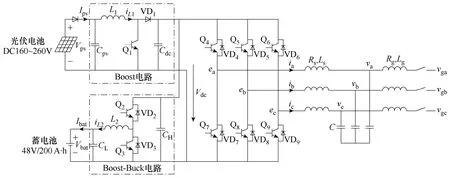
图7 实验室光伏系统接线图Fig.7 PV experimental system
表2给出了样机参数,在环境温度为25℃、光照条件约为200W/m2时(最大功率约为 1000W),利用电能质量分析仪分别在实验电网频率为49.9Hz和 50.1Hz的情况下实时测量逆变器输出的有功功率和无功功率。
测试单台逆变器动态跟踪性能实验过程如下:
t=5s,满足预并列条件并网;
t=10s,Pset=300W,Qset=150var;
t=15s,开始改进下垂控制;
t=20s,联网转孤岛运行;
t=25s,负载由半载切换至满载;
t=30s,实验结束。
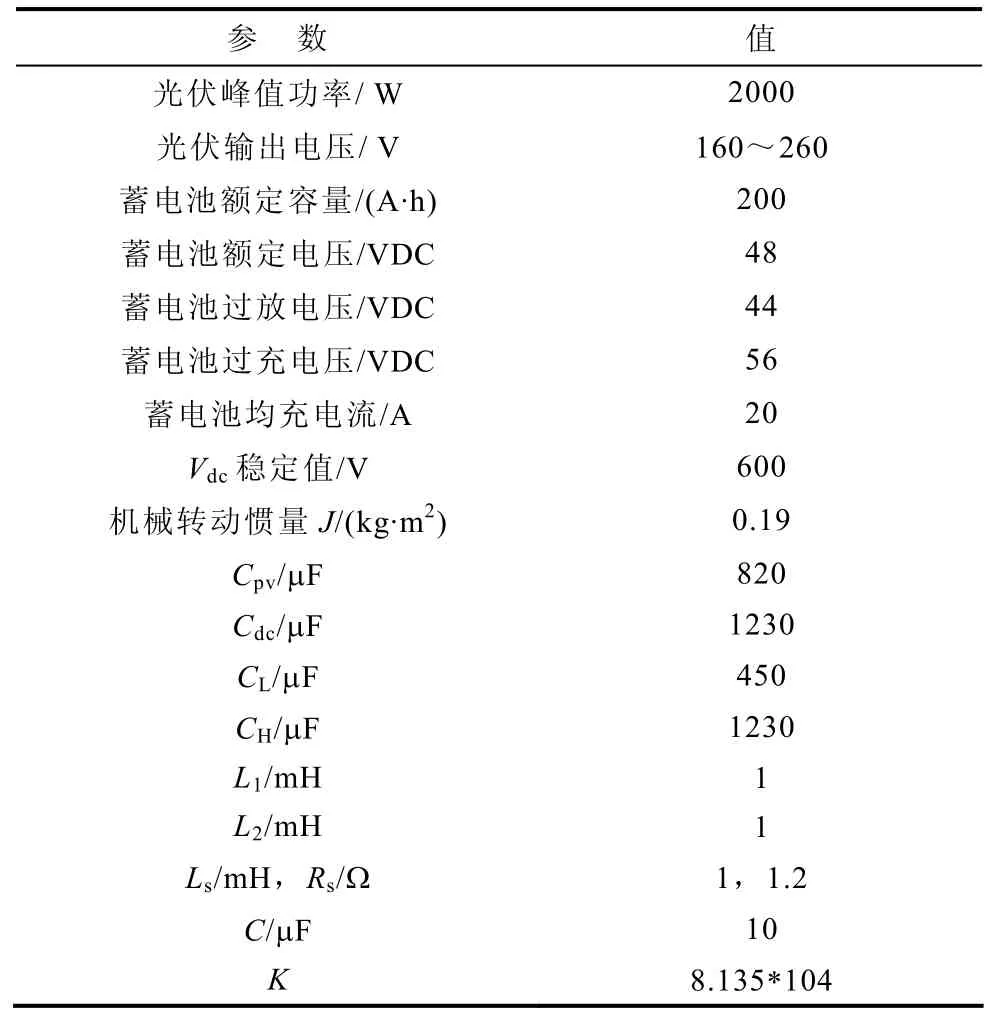
表2 样机主要参数Tab.2 Main parameters of prototype
实验结果如图8所示。t=5s时,光伏并网逆变器满足预并列条件并网;t=10s时,输出有功功率增加至设定值 300W,输出无功功率稳定在设定值150var;t =15s时,使能下垂调节,实验电网频率降至49.9Hz时,系统有功不足,逆变器输出有功功率升为350W左右,实验电网电压上升5%,无功功率降为零左右;t =20s时,微网由联网运行切换至孤岛模式,由微源设定电压和频率基准,微源承担了全部负荷功率;t =25s时,孤岛运行的微网由半载转满载运行,能够有效跟随负荷功率变化改变输出功率。图8a实验过程与图8b不同之处在于下垂控制的外界条件不同,图8b所示波形在t =15s开始下垂调节时,实验电网频率升为50.1Hz时,实验电网电压降 5%,系统有功剩余,逆变器输出有功功率降为150W左右,无功功率升为300var左右。


图8 并联运行逆变器输出功率波形Fig.8 Experimental results of the inverter power output
图8c和图8d为测试功率分配效果的实验波形,实验条件为孤岛,两台容量比例为2︰1的逆变器并联,7.5s以前空载运行,7.5s以后接负载,观测对负荷的分配效果,对比发现,改进下垂控制器控制时两台逆变器能够按照单位容量均分负荷,而传统下垂控制法控制时,无功功率输出由于等效线路输出阻抗不同不能按照额定容量比分配。同时,采用同步发电机模型和改进下垂控制器后空载环流小于传统下垂控制器。
6 结论
本论文采用虚拟同步发电机模型用于微网微源多逆变器间功率控制,分析了该模型在改善功率分配、提高均分度方面的优势,采用改进下垂特性的功率控制器改善逆变器的跟踪性能,并降低了空载环流。适用于包含不同功率等级、不同供电形式微源的微网功率控制和环流抑制,有助于进一步降低新能源并网门槛并提高供电可靠性。
[1]余贻鑫, 栾文鹏.智能电网述评[J]].中国电机工程学报, 2009, 29(34): 1-6.Yu Yixin, Luan Wenpeng.Smart grid and its implementations [J].Proceedings of the CSEE, 2009,29(34): 1-6.
[2]鲁宗相, 王彩霞, 闵勇, 等.微电网研究综述[J].电力系统自动化, 2007, 31(19): 101-102.Lu Zongxiang, Wang Caixia, Min Yong, et al.Overview on micro-grid research[J].Automation of Electric Power Systems, 2007, 31(19): 101-102.
[3]陈达威, 朱桂萍.低压微电网中的功率传输特性[J].电工技术学报, 2010, 25(7): 117-122.Chen Dawei, Zhu Guiping.Power transmission characteristics of low voltage microgrids[J].Transactions of China Electrotechnical Society, 2010,25(7): 117-122.
[4]吕志鹏, 罗安, 荣飞, 等.电网电压不平衡条件下微网 PQ控制策略研究[J].电力电子技术, 2010,44(6): 71-74.Lü Zhipeng, Luo An, Rong Fei, et al.Micro-grid PQ control strategy analysis under utility voltage imbalance[J].Power Electronics, 2010, 44(6): 71-74.
[5]Murakamia A, Yokoyama A, Tada Y.Basic study on battery capacity evaluation for load frequency control(LFC) in power system with a large penetration of wind power generation[J].IEEJ Transactions on Power and Energy, 2006, 126(2):236-241.
[6]Qing-Chang Zhong, Weiss G.Static synchronous generators for distributed generation and renewable energy[C].IEEE/PES Power Systems Conference and Exposition, 2009: 1-6.
[7]Sao C K, Lehn P W.Autonomous load sharing of voltage source converters[J].IEEE Transactions Power Delivery, 2005, 20(2): 1009-1016.
[8]Brabandere K D, Bolsens B, Keybus J V, et al.A voltage and frequency droop control method for parallel inverters[J].IEEE Transactions on Power Electronics, 2007, 22(4): 1107-1115.
