一种复合伪随机码跟踪环路设计及误差分析
2012-07-25潘伟萍
潘伟萍 崔 嵬 王 俊 郭 韧
(北京理工大学信息与电子学院 北京 100081)
1 引言
无线电测距原理是测量无线电波的传输时延。首先发射无线电波,然后测量由目标反射或转发回来的信号相对于发射信号产生的时延τ,从而计算出距离。伪码测距是根据本地复制伪码与接收伪码的相关特性得到本地复制伪码相位从而测定电波传播时间τ。为了缩短伪码相位捕获时间,复合码测距[1-3]被广泛应用。复合码是由几个较短的伪码子序列组合而成的长周期码序列,复合码与其构成子码均具有良好的互相关特性。接收机将接收到的测距伪码与每个本地子码序列进行相关、同步后,利用中国剩余定理得到收发伪码的时延,进而解算出目标与接收机的距离。
组成复合码序列的其中一个子码是周期为2即‘1’和‘0’交替的布尔序列,称为钟码分量。对钟码分量的跟踪精度决定了测距的精度。文献[3]和文献[4]均给出了一种相干型伪码跟踪环路,在进行伪码跟踪前要求完成载波同步。然而工程中不可避免的载波相位残差的存在会降低相干型伪码跟踪性能甚至导致环路失锁[5]。非相干型伪码跟踪环路可以较好解决由载波相位残差引起的环路失效问题。本文针对复合码钟码分量的特点结合文献[6]给出的非相干型伪码跟踪环路设计方法提出了一种针对复合码跟踪的非相干型环路,该环路只用到两个支路的再生伪码,解决了环路跟踪性能对造币相位残差的依赖问题并简化了环路设计。同时,针对非相干型伪码跟踪环路热噪声误差高于相干型伪码跟踪环路[3,7]的情况,通过对该跟踪环路的热噪声跟踪误差进行理论分析及仿真,表明该跟踪环路的热噪声误差恶化程度较小。故在存在较大载波相位残差情况下,使用本文提出的跟踪环路能够有效提高复合码的跟踪性能。
2 信号模型描述
复合码调相的信号形式可表示为

式中P为信号功率,ω0为载波频率,θr为伪码调制度,r(t)为复合码序列,n(t)为功率谱密度等于N0的窄带高斯白噪声。
已知 cos(r(t))=1, sin(r(t))=r(t),对式(1)进一步推导可得出

式中s1(t)为残留载波支路,s2(t)为伪码支路。
为了降低伪码频谱对相干载波频谱的干扰,r(t)取 为 经BOC(α,β) (α= 1,β= 1)调 制 的 复 合码[6-8]。组成复合码的各个子码如表1所示。

表1 复合码的测距子码(布尔序列)
此复合码由4个子码组成,第n个子码的长度为Ln(1 ≤n≤ 4 )。C1为钟码分量。对于每个子码Cn(j),j为码片位置,其周期为Ln,即Cn(j)=Cn(j·modLn)。由子码合成复合码的逻辑表达式为

由于子码长度互素,故复合码的周期为(以码片为单位)子码长度的乘积Lr,即Seq(j+Lr)=Seq(j),其中Lr=∏Ln=2×7×15×19=3990 chip。
定义第n个子码序列与偏移了m位的复合码序列之间的互相关为

其中n= 1~4,m<Ln, Seq(j+m)为经BOC(α,β)(α= 1,β= 1)调制后的新的复合码序列,(j)为经BOC(α,β) (α= 1,β= 1)调制的相应复合子码。可得该复合码的互相关特性为式(7):

设定伪码速率为 3.99 Mcps,采样率为 60.242 MHz后的相关值如图1所示。
跟踪此复合码时,本地再生的伪码相位应与钟码分量相位相同,因此钟码分量的自相关特性决定了跟踪的精度,而其他子码经 BOC后产生的副相关峰对跟踪环路不产生影响。
3 非相干型复合码跟踪环路设计
传统的复合码跟踪环路采用 CCSDS推荐的相干型伪码跟踪环路[1],相干型伪码跟踪环路具有结构简单,热噪声误差相对较小等优点,但该环路对载波相位的跟踪情况有较大的依赖性,当存在载波相位残差较大时,相干型伪码跟踪环路的跟踪精度降低,并且在载波相位残差增大到一定程度时失效。本文提出了一种非相干型复合码跟踪环路,其结构、鉴别器和滤波器的设计如下文所示。
非相干型复合码跟踪环路的设计框图如图2所示。

图1 BOC调制前后复合码的归一化自相关曲线
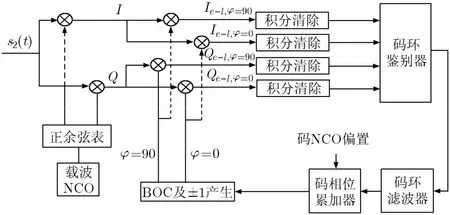
图2 复合码跟踪环路框图
已知伪码支路的信号为

式中n(t)为窄带高斯白噪声,功率谱密度等于N0。
经正交解调可得低频分量为

式中nI(t)和nQ(t)为独立的窄带高斯白噪声,功率谱密度等于N0/4。
将经 BOC调制的本地再生相位相差0°和 90°的本地方波记为cφ=0和cφ=90与接收信号的正交解调后的信号进行相乘、积分清除,分别得到的相关结果Ie-l-2,φ=0,Qe-l-2,φ=0如式(10)所示,Ie-l-2,φ=90和Qe-l-2,φ=90如式(11)所示。

式中τ为本地方波与接收信号钟码分量的相位残差(码片表示),NI,e-l-2,φ=0,NQ,e-l-2 ,φ=0,NI,p-2 ,φ=9 0和NQ,p-2,φ=90为独立的高斯白噪声,方差等于σ2,满足P/4σ2=C/N0T,且有
其中Rc(·)代表方波自相关函数,满足式(13)。Rc(τ)=pc(1 - 2 |τ- 2i| )2i- 1 <τ< 2i+ 1 ,i∈ℤ(13)式中pc=Cor(1,0)=0.7534。
3.1 鉴别器设计
采用归一化非相干鉴别器,其鉴别结果eck为

噪声对环路跟踪性能的影响见第4节分析,此处采用与相干鉴别相同的处理方法,忽略噪声将式(10),式(11)代入式(14)得到

不失一般性设τ∈(-0.5, 0],i=0,则有可知归一化非相干鉴别器的增益为 2。文献[3]

的相干鉴别器为载波相位跟踪误差 Δθe= 0 时的结果:

将其与式(16)比较分析可知,相干鉴别器鉴别值对残留载波相位敏感而归一化非相干鉴别方法对残留载波相位不敏感。将所得归一化非相干鉴别曲线与文献[3]相干鉴别方法的鉴别曲线比较如图3所示。

图3 非相干鉴别器与相干鉴别器鉴别曲线比较
由图3可知本文所设计的非相干鉴别方法具有与相干鉴别方法相近的鉴相范围,且鉴别增益高于相干鉴别方法。
3.2 滤波器设计
由于码速率的多普勒成分和载波多普勒频率有固定比例关系,因此设计载波跟踪环对码跟踪环进行载波辅助,可以消除码跟踪环的大部分频率动态,码跟踪环的频率跟踪误差在设计中可以忽略。
复合码跟踪环路采用二阶环路,一阶环路滤波器,其最优环路传递函数[9]为

二阶码环的一阶数字滤波器的离散传递函数为

式中ξ为环路阻尼系数,T为环路滤波器的更新时间Tcoh,K=KdKv为环路总增益,Kd=2为归一化非相干鉴别器的增益,Kv=1为码 NCO(数控振荡器)增益,ωn=BL/(1/2(ξ+1/4ξ))为环路滤波器的自然角频率,BL为环路带宽。
4 跟踪性能分析
通过推导环路的热噪声误差公式来分析环路的跟踪性能,对式(10)和式(11)结果进行噪声归一化处理,则相关结果可表示为

式中C/N0为伪码支路的载噪比,T为积分清除时间,τk为第k积分周期的码片个数延迟量,nIk,φ=0,nIk,φ=90,nQk,φ=0,nQk,φ=90均为相互独立的均值为0,方差为1的高斯白噪声。
对式(10)和式(11)进行理想归一化[9,10],可得鉴别值为

eτk的期望值和方差[9]分别如式(22)和式(23)所示。
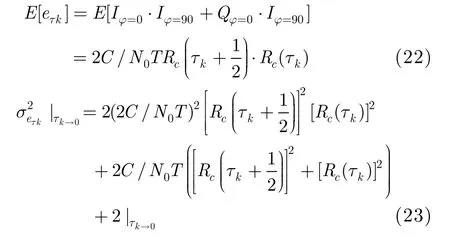


同时依据相关曲线式(13),可得eτk的期望值和方差,并最终得到环路热噪声误差:

由式(25)可知,环路的热噪声误差由环路等效带宽BL、载噪比C/N0、环路的积分清除时间T以及钟码分量的自相关峰值pc共同决定。详细推导过程见文献[10]。
5 仿真比较
首先,在不存在载波相位残差的情况下,比较本文所提出的非相干型复合码跟踪环路与传统的相干型复合码跟踪环路的热噪声误差,如图4所示。
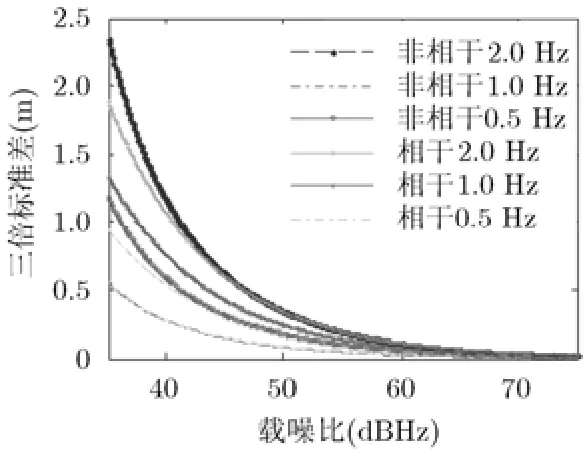
图4 不同带宽下两种环路结构热噪声误差比较
从图4可知非相干型复合码跟踪环路在不存在载波相位残差时的热噪声误差略大于相干型复合码跟踪环路,但随着载噪比的提高,差距逐渐缩小。
其次,在存在不同载波相位残差情况下对本文所提出的非相干型复合码跟踪环路与传统的相干型复合码跟踪环路的跟踪性能进行比较分析。设定载波跟踪环路的结果及复合码跟踪环路除鉴别器外的其他参数完全相同,设计伪码速率为3.99 Mcps,采样率为60.242 MHz,仿真距离为29.69 m,复合码跟踪环路带宽为2 Hz,载噪比为35 dBHz,设置不同载波相位残差0°, 30°, 90°,得到的跟踪结果如图5所示。
图5中的5(a)和5(b)分别为载波相位残差为0°时相干型与非相干型复合码跟踪环路的跟踪结果,图5(c)和5(d)分别为载波相位残差为30°时相干型与非相干型复合码跟踪环路的跟踪结果,图 5(e)和5(f)分别为载波相位残差为 90°时相干型与非相干型复合码跟踪环路的跟踪结果。比较图5中的5(a),5(c), 5(e)可知当载波相位残差增大时相干型复合码跟踪环路的噪声起伏幅度增大甚至失锁,而本文设计的非相干型复合码跟踪环路几乎不受影响。设置不同的载噪比35 dBHz, 45 dBHz, 70 dBHz,比较相干型与非相干型复合码跟踪环路的跟踪效果如图6所示。

图5 不同载波相位残差时相干型与非相干型复合码跟踪环路的跟踪效果比较
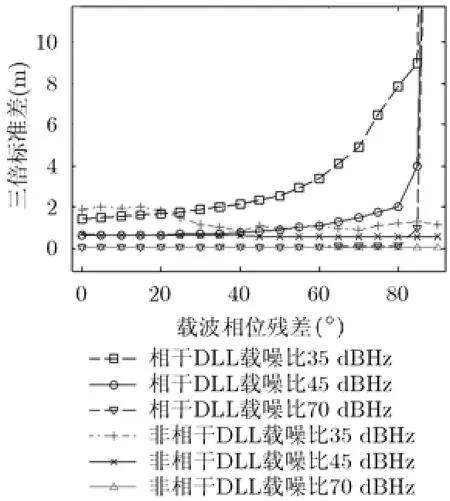
图6 不同载噪比下载波相位残差对距离跟踪的影响
从图6分析比较可知在载波相位残差低于30°时,相干型复合码跟踪环路(DLL)优于非相干型复合码跟踪环路,而当载波相位残差高于 30°时,非相干型环路则优于相干型,且随着载波相位残差的增大相干鉴别方法的距离跟踪误差随着进一步增大,并最终跟踪失效,而非相干鉴别方法几乎不受载波相位残差的影响。仿真结果显示了在存在载波相位残差的情况下,采用新的鉴别方法的环路能进行有效地跟踪。
6 结论
本文提出了一种适合于复合码跟踪的非相干型跟踪环路,对该环路的结构、鉴别器和滤波器进行了设计。与传统的相干型复合码跟踪环路比较,在载波相位残差小于30°时,相干型环路具有较好的跟踪性能,在载波相位残差大于30°时,本文提出的非相干型环路性能更优,故本文提出的非相干型环路具有更广泛的应用。
[1]CCSDS.org. Pseudo-Noise (PN) Ranging Systems. Green Book. Issue 1[OL]. http://public.ccsds.org/publications/archive/414x0g1.pdf. 2010.
[2]Berner J B, Kinman P W, Layland J M,et al.. Regenerative pseudo-noise ranging for deep-space applications [R]. TMO Progress Report 42-137, Jet Propulsion Laboratory,Pasadena, California, May 15, 1999.
[3]丁溯泉, 李海涛. CCSDS建议的再生伪码测距性能分析[J].宇航学报, 2011, 32(10): 2242-2248.
Ding Su-quan and Li Hai-tao. Performances analysis of regenerative pseudo-noise ranging recommended by CCSDS[J].Journal of Astronautics, 2011, 32(10): 2242-2248.
[4]姚飞, 匡麟玲, 等. 一种深空再生复合伪码测距信号的自适应捕获跟踪技术[J]. 宇航学报, 2009, 30(1): 266-270.
Yao Fei, Kuang Lin-ling,et al.. An adaptive acquisition and tracking technique of the composite PN codes for deep space regenerative ranging [J].Journal of Astronautics, 2009, 30(1):266-270.
[5]程兰. 一种归一化点积功率型伪码跟踪鉴相算法[J]. 北京理工大学学报, 2010, 30(12): 1427-1431.
Cheng Lan. A normalization DOT discriminator algorithm for PN code tracking loop [J].Transactions of Beijing Institute of Technology, 2010, 30(12): 1427-1431.
[6]杨再秀, 黄智刚, 耿生群. 基于副载波跟踪的 BOC 信号跟踪环路设计[J]. 北京航空航天大学学报, 2011, 37(2): 245-248.
Yang Zai-xiu, Huang Zhi-gang, and Geng Sheng-qun. Novel tracking loop of BOC signal based on subcarrier tracking [J].Journal of Beijing University of Aeronautics and Astronautics,2011, 37(2): 245-248.
[7]Najmul A K M. Moment based CNR estimators for BOC/BPSK modulated signal for Galileo/GPS[C].Proceedings of the 5th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 2008: 129-136.
[8]李彩华, 张鑫, 庞晶, 等. BOC导航接收机伪码测距零值分析[J]. 宇航学报, 2011, 32(11): 2351-2356.
Li Cai-hua, Zhang Xin, Pang Jing,et al.. Zero value analysis of pseudorange measurement in navigation receiver for BOC signals [J].Journal of Astronautics, 2011, 32(11): 2351-2356.
[9]Kaplan E D and Hegarty Christopher J. Understanding GPS Principles and Applications [M]. Second Edition, Beijing:Electronic Industry Press, 2007: 125-130.
[10]Van Dierendonck A J. Theory and performance of narrow correlator spacing in a GPS receiver [J].Journal of the Institute of Navigation, 1992, 39(3): 265-283.
