基于积分分离模糊PID的开关磁阻发电机最大风能跟踪
2012-07-20周珍珍易灵芝徐天昊彭寒梅
周珍珍,易灵芝,徐天昊,彭寒梅,柯 广
(1.湘潭大学,湖南湘潭411105;2.电子科技大学,四川成都610054)
0 引 言
开关磁阻发电机(以下简称SRG)结构简单、容错性好、转矩密度高;控制灵活、低速运行性能好、变速运行范围宽;发电工作时相当于一个电流源,易并网运行。这些特点使得SRG非常适用于低速直驱风力发电系统中,具有很好的应用前景[1-4]。但目前开关磁阻风力发电系统处于理论探讨阶段,一些工程应用的关键技术问题还没有得到很好的解决,国内外仍未有系统投入实际运行。
目前对开关磁阻风力发电系统的研究大都集中在抑制输出电压脉动和提高输出功率,对如何使SRG与风轮机良好配合以实现最大风能跟踪的研究不多[5-7]。国内外专家提出了风力发电系统的三种闭环控制方案。风速跟踪控制方案按相应风速下风轮机的最佳功率曲线输出最大功率,需安装测风装置和知道风轮机特性[8-9]。功率扰动控制方案和转速反馈控制方案都对风轮机的特性依赖小,也不需测风装置,但功率扰动控制方案在功率采样时间和扰动量的设计上存在困难,且系统容易振荡[8,10]。转速反馈控制方案系统调节较快,能保证风轮机工作在最佳功率线附近,且控制参数设计比功率扰动控制方案要容易,设计开发周期较短,本文采用此方案来实现开关磁阻风力发电系统最大风能跟踪。
转速反馈控制方案中需要用到功率调节器。PID调节器具有结构简单、易于工业实现等优点,广泛使用于连续系统中。确定PID调节器的结构和控制算法后,其控制质量的好坏主要取决于参数的选择,常采用简单的工程整定法。开关磁阻风力发电系统是一个多变量、强耦合的非线性系统,常规PID控制算法不能完全适应其宽转速调节;同时在风速大幅度突变时,系统会出现大的功率偏差,积分项的滞留作用容易使控制量一直饱和,导致调节器无法正常运行。本文采用积分分离模糊PID的功率控制器,其参数整定不依赖于开关磁阻风电系统的数学模型,且能在线实时调整,以适应宽转速运行,提高系统的鲁棒性。
1 开关磁阻风力发电系统
开关磁阻风力发电系统主要由SRG及其功率变换器、风轮机、控制器、蓄电池和负载等组成。风轮机将风能转换为机械能,SRG进一步将机械能转换为电能。
1.1 开关磁阻发电机的工作原理及基本控制
SRG的发电本质不同于一般发电机。在电感线性模型下产生的瞬时相电磁转矩Te和输出功率Pe:

式中:i为相电流;L为相电感;θ为电机转子位置角。
采用SRG自励发电模式,其功率变换器主电路如图1所示,由外部电源Us提供初始励磁,建压后由二极管VD9切断Us,此后由电机本身发出的电压ud提供励磁。通过检测直流侧的电压ud、电流id可计算出SRG的输出功率。

图1 自励发电模式主电路
SRG的实际控制参数有主控开关开通角θon、关断角θoff、励磁电压及相电流上限。当SRG的转速低于基速时,相电流较大,需控制功率变换器每相主控开关的通断来调节相电流;当SRG的转速高于基速时,不需要控制峰值电流,可改变开通角和关断角。常用的基本控制方法有角度位置控制、PWM控制和电流斩波控制。本文采用适合低中速的电流斩波控制,改变相电流斩波限幅可以改变SRG的输出功率。
1.2 风轮机的功率特性
根据贝兹证明,风轮机从风能中吸收的功率P:

风轮机的功率-转速特性曲线如图2所示,最佳功率曲线Popt是不同风速下风轮机最大输出机械功率点的连线。由图2可以看出,欲使风轮机工作在Popt曲线上,必须在风速v变化时及时调整风轮机转速ωm,保持恒定的最佳叶尖速比λopt。通过桨叶控制可调节ωm,但变距系统结构复杂,维护困难,精度低,一般用于大型风力发电系统额定功率以上的调节。本文控制发电机的输出功率来调节其电磁转矩,进而调节发电机的转速及ωm。

图2 风轮机功率-转速特性曲线
2 最大风能跟踪
2.1 系统整体控制方案
实现开关磁阻风力发电系统最大风能跟踪的整体控制框图如图3所示,在风速变化时,通过控制SRG的输出功率来及时调整SRG的电磁转矩和转速,以调节ωm来保持最佳叶尖速比。SRG由外力拖动达到正常转速运行范围,根据发电机转速n以及风轮机的特征参数CPmax、λopt,计算出给定功率Pgive,并与发电机的输出功率Pe相比较得到偏差,经PID调节器给出SRG的相电流斩波限幅Ichop。控制参数Ichop结合θon、θoff及SRG当前的转速决定发电机的输出电流i,进而调节输出功率Pe。输出功率变化将导致电磁转矩的变化,从而影响转速。

图3 系统整体控制框图
如图2所示,假设在风速v1下风轮机稳定运行,工作在最佳功率曲线上的A点,此时风轮机的输出功率Pm1、计算出的给定功率Pgive及发电机的输出功率Pe相等;当外界风速由v1突变增加到v2,风轮机则将跳至B点运行,其输出功率由Pm1突增至Pm3,由于惯性作用,发电机仍暂时运行在A点,有Tm>Te,导致发电机转速上升,Pgive和Pe也随之变化,经PID调节直至到达C点,功率再一次达到平衡,风轮机转速稳定为v2对应的最佳转速ω2。
假设在风速v3,风轮机稳定运行于最佳功率曲线上的E点。当外界风速由v3突变减小到v2,风轮机则将跳至D点运行,其输出功率由Pm5突减至Pm2,由于惯性作用,有Te>Tm,导致发电机减速,Pgive和Pe也随之变化,经PID调节直至到达C点,功率再一次达到平衡,风轮机转速稳定为ω2。
2.2 模糊PID设计
本系统的积分分离模糊PID控制器结构如图4所示。选用二输入三输出结构,输入为功率偏差和功率偏差变化率,输出为控制参数KP、KI、KD。根据输入的功率偏差和功率偏差变化率,并利用模糊规则进行模糊推理,在线整定 KP、KI、KD。

图4 模糊PID结构图
由仿真运行和经验,得到模糊控制器的各语言变量的论域:功率偏差E=[0 750],功率偏差变化率 EC=[0 4 000],KP=[0.005,0.05],KI=[1.4,2.4],KD= [0.01,0.05]。输入、输出变量的模糊子集数都取为 7 个,即{NB,NM,NS,ZO,PS,PM,PB},相应的隶属度函数取三角形函数,推理过程采用加权求平均的Tsukamoto方法。模糊控制规则可表示:

式中:Aj代表模糊论域;v(l)为需要学习推理出来的模糊结论。
根据仿真调试经验,总结出47条模糊控制规则。模糊推理采用最大-最小合成法,反模糊化算法采用重心法,经在线仿真运行得到模糊控制器输入输出关系曲面。
图5是KI的隶属度函数和关系曲面。

图5 KI的隶属度函数和关系曲面
2.3 积分分离算法
在多变的风场中,存在风速大幅度突变的情况,这时产生的功率偏差和功率偏差变化率大。由表1可知,当E和EC为正大时,模糊PID控制产生的KI为正大;且积分控制有滞留作用,对于具有滞后的开关磁阻风力发电系统,积分项的滞留作用会使控制量Ichop一直饱和,导致调节器无法正常运行。采用积分分离的PID控制算法来加以解决。
设定一个偏差的门限值e0,当功率偏差e的绝对值大于e0时,不引入积分作用,此时只执行模糊的PD控制,以免因积分累积使控制量不能退出输出饱和;当功率偏差e的绝对值小于e0或等于e0时引入积分控制作用,即此时系统采用模糊PID控制,以利于积分作用最终消除静差,提高控制精度。积分分离的PID控制算法可表示:

式中:β是一个双值权系数,按下式取值:

积分分离的PID控制,一方面阻止了一开始就产生过大的控制量;另一方面,即使进入饱和后,因积分累积小,也能较快退出,使调节器正常运行。
3 仿真研究
3.1 系统仿真模型的建立
根据系统整体控制方案,在MATLAB环境下,建立开关磁阻风力发电系统仿真模型如图6(a)所示。其中,SRG模块是开关磁阻发电机仿真模型,其一相仿真如图6(b)所示;Cd为直流侧母线电容;RL为直流侧固定电阻负载。

图6 开关磁阻风力发电系统真图

计算给定功率模块是根据SRG当前的转速n以及风轮机的特征参数CPmax、λopt,计算出给定功率Pgive。图6(c)是积分分离的模糊PID调节器仿真模块,其中,模块FLC实现模糊控制器,调节参数KP、KI、KD;模块PIDchushi通过m函数实现积分分离算法。输出为SRG的相电流斩波限幅Ichop,实现对SRG输出功率的控制。
3.2 仿真结果及分析
仿真中所用的参数如下。SRG参数:8/6极,750 W,最大相电流为 8 A,绕组内阻 r=0.15 Ω,最小电感Lmin=10 mH,最大电感Lmax=110 mH,转矩惯量 J=0.001 6 kg·m2,摩擦系数 f=0.018 3。风轮机参数:风轮半径R=1.4 m,假定空气密度ρ=1.25 kg/m3。系统控制参数:直流侧电容Cd=2 200 μF,负载RL=300 Ω,电流斩波控制滞环宽度为0.1 A,θon=28°,θoff=43°。SRG 由外力拖动达到其转速运行范围,阶跃起动转矩 T0:tStep=1 s,初值2.5,终值0,阶跃起始给定相电流斩波限幅I0:tStep=1s,初值3.5,终值0。t=1 s时接入风力机及最大风能跟踪控制。
风速固定为5 m/s的仿真波形如图7所示。图7(a)是风轮机的输出功率,可以看出,1 s后风轮机开始输出机械功率,经最大风能跟踪控制,0.5 s后输出机械功率达到最大,约为126 W;由图7(b)的SRG输出功率可知,1 s后SRG开始跟踪风轮机的输出机械功率,最终稳定约为121 W,静态余差为5 W,约为3.96%。图7(c)是风轮机的风能利用系数变化波形,CP值能很快调整在CPmax即0.264附近。

图7 风速稳定时最大风能跟踪控制的仿真结果
风速在t=3 s时由v1=4 m/s增至为v2=6 m/s,系统仿真波形如图8所示。由图8(a)的SRG输出功率可知,风速增大时,SRG的输出功率由53 W增至220 W。v1=4 m/s,v2=6 m/s时,由理论计算式得出 SRG的最佳角速度分别为57.14 rad/s,85.71 rad/s,由图8(b)可知,SRG的实际角速度分别稳定为53.8 rad/s和86.1 rad/s,与理论计算值吻合。验证了风速变化时,SRG能自动调节至最佳转速,使风轮机捕获到最大风能;也验证了本文采用的积分分离模糊PID控制能适应宽转速运行,且静动态性能较好。图8(c)是风轮机的输出机械功率与SRG的输出功率的差值波形,由图可知,风速突变时产生的功率偏差大,经基于积分分离模糊PID的最大风能跟踪控制,偏差很快减小,验证了该方法的有效性。
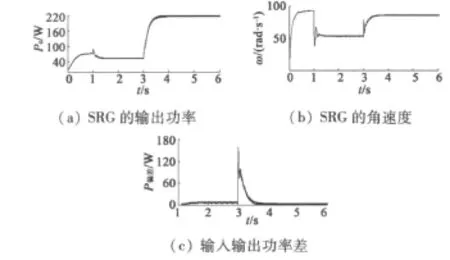
图8 风速变化时最大风能跟踪控制的仿真结果
4 结 语
本文提出了基于积分分离模糊PID的转速反馈控制方案,以实现开关磁阻风力发电系统最大风能跟踪。设计模糊控制器和积分分离算法,构建开关磁阻风力发电系统仿真模型,对该方案进行仿真验证。仿真结果表明,此方案能保证风轮机工作在最佳功率线附近,积分分离算法能有效解决控制量不能退出饱和的问题,且系统简单可靠,调节快,鲁棒性好,易于现场实现,具有一定的工程应用价值。
[1] 彭寒梅,易灵芝,邓文浪.用于小型风力发电的SRG建模与控制[J].微特电机,2010(5):70-73.
[2] 熊立新,高厚磊,徐丙垠.变速直驱开关磁阻风力发电系统的控制与实现[J].太阳能学报,2010,31(6):782 -788.
[3] 茆美琴,余世杰,苏建徽,等.开关磁阻发电机用于直接驱动、变速运行风力发电系统的评估[J].太阳能学报,2005,26(3):386-390.
[4] 黄曌,易灵芝,钟坤炎,等.开关磁阻风电系统中并网逆变器的研究与实现[J].电力电子,2008(4):48-52.
[5] 刘北阳,张奕黄,杨岳峰.模糊PI控制在开关磁阻发电系统中的应用[J].微特电机,2009(4):54-56.
[6] 彭寒梅,易灵芝,朱建林.SRG输出电压脉动抑制的研究及仿真[J].系统仿真学报,2010,22(5):1237 -1242.
[7] 彭寒梅,易灵芝,邓文浪.基于三电平功率变换器提高SRG输出功率[J].太阳能学报,2010,31(12):1661 -1667.
[8] 朱学忠,张琦雪,刘迪吉.开关磁阻风力发电机系统的控制方案研究[J].数据采集与处理,2003,16(1):81 -84.
[9] 熊立新,徐丙垠,高厚磊,等.一种开关磁阻风力发电机最大风能跟踪方法[J].电工技术学报,2009,24(11):1 -7.
[10] 胡海燕.开关磁阻风力发电系统研究[D].浙江大学,2005:1-65.
