交流混合型磁轴承磁场及悬浮力特性分析
2012-07-20张维煜朱熀秋
张 松,张维煜,朱熀秋
(1.南京师范大学,江苏南京210097;2.江苏大学,江苏镇江212013)
0 引 言
磁轴承作为一种极有前途的轴承,依据驱动电流类型不同,大致可分为两类:①由直流电驱动的磁轴承,即称为直流磁轴承[1];②由交流电驱动的磁轴承,即称为交流磁轴承[1]。功率放大器对于直流磁轴承来说,它具有成本高、体积大的缺点。驱动一个径向磁轴承或者需要用采用4路单极性功率放大器,或采用2路双极性功率放大器亦可;而对于交流磁轴承,由于采用三相功率逆变器驱动,因此具有应用价格便宜、技术成熟且体积小的优点,而且驱动一个径向磁轴承只需要一个三相功率逆变器就可实现控制目的[1-4]。依据磁轴承中产生的悬浮力的原理不同,磁轴承大致可分为三种:偏置磁通来源于永磁体,控制磁通来源于电磁铁的磁轴承,即为混合型磁轴承;偏置磁通与控制磁通完全来源于永磁体的磁轴承,即为被动型磁轴承;偏置磁通与控制磁通完全来源于电磁铁,即为主动型磁轴承[3]。其中,混合型磁轴承具有明显的优势,由于永磁体的存在,使得其静态偏置磁通是永磁体负责产生,解决了主动磁轴承中的偏置磁通来源于电磁铁的弊端,在很大程度上使得功率放大器的功耗有所减少[4]。又由于在混合磁轴承中,偏置磁通无需电磁铁提供,因此使得电磁铁的安匝数大大减少,且磁轴承的体积也有所减小。由此,交流混合型磁轴承在高速电主轴、高速飞轮储能、无轴承电机等场合具有潜在应用前景[1-4],已成为磁轴承研究与发展的一个热点方向。
本文不仅对交流混合型磁轴承的组成结构进行了介绍,而且对该交流混合型磁轴承的工作基本原理也进行了阐述,还创建了该磁轴承的实体模型,利用Ansoft软件仿真并分析了该交流磁轴承的磁通分布状况(气隙及磁极内部)。并分别以磁轴承的有限元实体模型和数学模型为研究对象,利用Ansoft有限元分析软件与MATLAB软件对磁轴承悬浮力的非线性变化规律进行了计算分析。仿真结果表明:针对于该磁轴承内的磁场分布情况来说,其分析结果与从理论上分析其磁场走向及分布情况吻合,该磁轴承的参数设计的是有效的;基于数学模型和有限元实体模型的交流混合型磁轴承特性分析结果一致,该磁轴承所建立的数学模型与磁轴承实际工作情况下的模型几乎一致。
1 结构与工作原理
图1为交流混合型磁轴承的整体结构视图。从图中可以看出,交流混合型磁轴承的定子是由一组对称的定子片所构成,每个定子片上均分布有3个沿圆周互呈120°的凸极,因此该磁轴承一共有6个磁极。两个定子片对应的凸极分布角度相同,这些凸极上分别绕制有三相控制线圈,且两个定子片上同一角度对应的凸极上缠绕的线圈以串联形式连接。永磁体与隔磁铝环位于对称的定子片之间。

图1 关于磁轴承整体的结构视图
工作原理如下:对于交流磁轴承来说,其原理是与无轴承电机的工作原理有紧密关联的,也就是说交流磁轴承相当于其转矩绕组极对数为0,悬浮力绕组极对数为1,且采用三相功率逆变器给悬浮力绕组提供控制电流的一种特殊的无轴承电机[5-7]。在径向方向上如果存在扰动,则转子因此发生偏移。此时传感器负责采集径向方向上的偏移x与y,此位移信号经过控制器处理,输出的控制信号再经过三相功率逆变器进行驱动,输出的三相控制信号使得作用在转子上的由三相控制线圈和永磁体共同作用的合力方向与转子发生偏移方向相反,其大小可以使转子稳定悬浮在所设定的平衡位置。
图2为交流混合型磁轴承内部的磁路分布情况。图中,实线代表静态偏置磁通的走向,是由永磁体造成的实线的起点出自于N极(永磁体),分别流经一侧定子后进入相应气隙、然后穿过转子后进入另一。侧气隙、然后进入另一侧定子,之后回归于S极;虚线代表控制磁通的走向,是由电磁造成的。

图2 磁轴承的内部磁路分布
2 数学模型
图3为永磁体作用绘制的磁路图。其中,Fm为磁动势的值,Φm为总磁通量,GA1、GB1、GC1、GA2、GB2、GC2分别为气隙磁导值,ΦA1、ΦB1、ΦC1、ΦA2、ΦB2、ΦC2分别为气隙磁通值。

图3 永磁体作用情况下的磁路图
图4为电磁铁作用下的磁路图。如果转子中心沿X、Y轴发生偏移x、y,则各气隙处磁导:

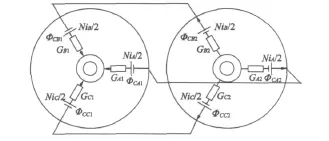
图4 电磁铁作用下的磁路图
式中:μ0为真空磁导率;S为磁极面积;δ为径向气隙长度。
根据磁路基尔霍夫定律ΣF=0和ΣΦ=0,施加控制磁通后,各气隙处由控制磁通和永磁偏置磁通相叠加构成合成磁通,其中各气隙处的偏置磁通及控制磁通:


将式(3)进行线性化处理,首先将其写成泰勒展开的形式,由于转子发生在平衡位置附近处的偏移量比起气隙长度来说,微乎甚微,因此文中将二阶以上无穷小量忽略,得:

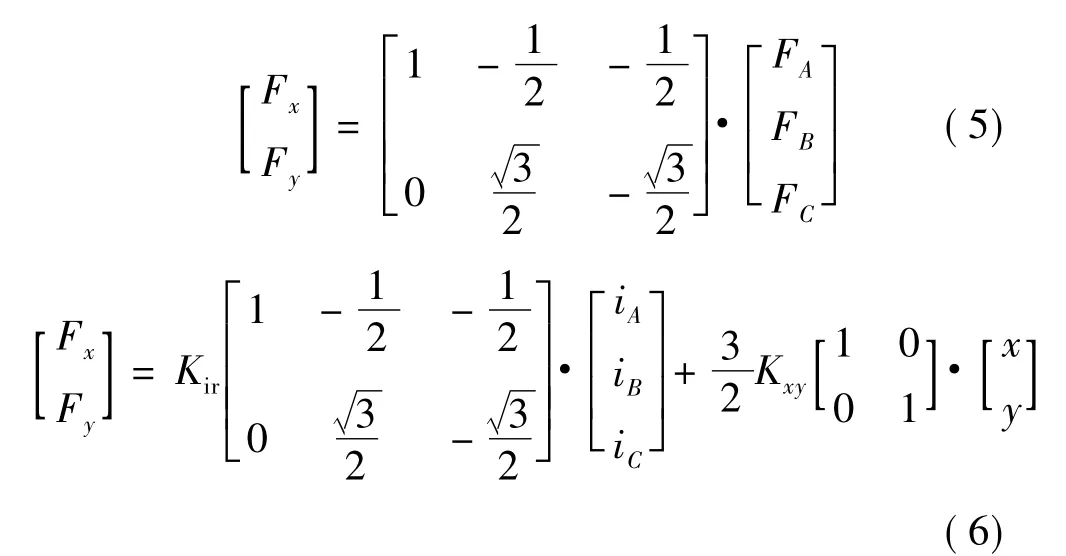
根据三相电流的关系iA+iB+iC=0,可得到:

3 基于实体模型的磁场分析
本文研究的交流混合型磁轴承部分结构及电磁参数:最大承载力Fmax≥350 N,气隙长度 δ=0.5 mm,饱和磁通密度Bsat=1.75 T,取BH曲线线性区最大磁通密度Bmax=0.9Bsat=1.575 T,轴向长度 L=38 mm,定子最大外径D=126 mm,磁极面积S=363 mm2,控制线圈采用的漆包线,其标称直径为0.67 mm,线圈匝数N=366匝,永磁体采用钕铁硼。
为防止铁心发生磁饱和现象且可以充分利用永磁体的最大磁性能,直流磁轴承一般将工作点B0选定在定子铁心磁化曲线的线性范围内最大磁通密度Bmax的1/2处。区别于直流磁轴承,交流混合型磁轴承的工作点B0则选在定子铁心磁化曲线的Bmax的1/3处,为0.525 T。由于本文研究的交流混合型磁轴承有极靴的存在,虽然流过磁路中的磁通相同,但极靴面积大于磁路中其它横截面积,所以气隙处磁通密度小于定子铁心的磁通密度。由于在理论计算气隙磁通密度时,一般围绕定子铁心的磁化曲线展开进行,所以气隙磁通密度值在磁轴承工作过程中应该小于理论计算值。本文中提到的磁极处磁通密度是基于磁极中选定的一个特定横截面上展开计算分析的。
图5是永磁偏置情况下的气隙磁通密度值与磁极内磁通密度值。由图5可知,气隙中分布的永磁磁场是关于中心对称的,并且磁轴承中分布的永磁磁场也是对称的。在气隙中的偏置磁通密度值为0.49 T,其值小于偏置磁通密度的计算值0.525 T,与理论分析相吻合,即对于气隙磁通密度值来说,其实际工作时的磁通密度值比理论计算值小。

图5 永磁偏置时磁极中与气隙中对应的磁通密度极坐标图
图6是永磁偏置与施加最大控制电流情况下的气隙磁通密度值。由图6可知,永磁偏置情况下,气隙处磁通密度值为0.49 T,施加最大控制电流时,A相磁极下对应气隙处的磁通密度值达到最大,B、C相磁极下的磁通密度值几乎抵消为零。A相磁极下气隙处磁通密度值约为1.1 T,其值小于理论计算的最大磁通密度值Bmax=1.575 T,与理论分析一致。

图6 两种情况下气隙中对应的磁通密度极坐标图
4 非线性分析
由式(3)可知,悬浮力Fi与磁通量(气隙)的二次方成正比,而控制电流和位移又决定气隙处磁通量的大小,由此Fi事实上只与x、y和ix、iy有关。图7(a)、图8(a)为不同位移处的力/电流关系曲线簇(基于磁轴承有限元实体模型,用Ansoft软件对磁轴承悬浮力的非线性特性进行分析)。另外,基于磁轴承数学模型,用MATLAB软件做出同样条件下不同位移处的力/电流关系曲线簇,如图7(b)、图8(b)所示。


图7(a)、图7(b)按着箭头所示的方向(转子在x轴方向位移从0逐渐变化到0.1 mm、0.2 mm,0.3 mm、0.4 mm)时,电流 ix与转子受力 Fx、Fy的关系曲线图。由图可知,受径向二自由度之间的交叉耦合关系影响所致,径向悬浮力Fx与控制电流ix的关系呈现了不对称性。安匝数从-150安匝变化到150安匝时,曲线的线性特性很好,控制该范围的磁轴承能达到较好的效果。可以看出随着转子在径向x的方向偏移量增大,其力/电流关系曲线的线性度变差。观察发现,转子在径向x方向0.4 mm处发生偏移时,平衡位置的线性度已经不是很理想,但是偏移发生在0.3 mm以内时,平衡位置的线性度仍然比较理想。说明磁轴承工作在气隙很小的范围内时,为取得优良的控制效果,磁轴承如果正常工作的气隙比较小时,无需采用复杂的非线性控制器就可以达到目的。如果磁轴承工作在气隙范围比较大的情况下,那么在设计控制器时需考虑补偿,由于大气隙造成的非线性和由于三级结构造成的非对称性,例如可采用神经网络逆控制器等进行解耦控制或者采用参数自整定模糊PID控制算法进行分段控制。
图8(a)、8(b)按着箭头所示的方向(转子在y轴方向的位移从0 逐渐变化到0.1 mm、0.2 mm、0.3 mm),电流iy与转子受力Fy、Fx的关系曲线图。由图可知,电流iy变化时,不仅产生径向力Fy,也产生在x轴负方向上的力Fx,控制电流iy的安匝数在-150安匝到150安匝之内变化时,Fx很小,Fx的上升幅度与安匝数的增加幅度成正比。
综上,图7显示悬浮力Fx与控制电流ix相对于平衡位置不是对称的,这是与该磁轴承的结构(三极)的非对称性所密切相关。但是图8中显示悬浮力Fx与控制电流ix相对于平衡位置是对称的。因此可得出,控制该磁轴承时,在x、y方向的控制难易程度是有所区别。在x方向调节磁轴承稳定悬浮时,其控制参数会影响y方向对磁轴承的控制效果,而控制y方向的转子平衡时,改变其控制参数则不会对x方向产生任何影响。
图7(b)、图8(b)相比于图7(a)、图8(a)是在完全理想的情况下的力/电流关系曲线,但是仍然可以反映表达此轴承的力/电流关系的趋势,与基于磁轴承有限元实体模型进行仿真的结果作比较,相似的结果证明了该磁轴承数学模型建立准确,逼近该交流型混合磁轴承的正常运行情况。
5 结 语
针对交流混合型磁轴承,本文应用经典有效的建模方法对该磁轴承进行了数学模型的建立;对采用有限元Ansoft磁场分析软件建立的磁轴承实体模型进行仿真分析,可以很清楚地观察到该磁轴承内的磁通分布情况;针对磁轴承的两种模型(有限元实体模型与数学模型),对其悬浮力非线性变化规律特性进行了计算分析。由仿真结果可知:对该磁轴承内的磁场分布情况来说,其分析结果与从理论上分析其磁场走向及分布情况吻合、两种模型分析下的悬浮力非线性特性分析结果一致,表明对该磁轴承的结构参数计算结果来说,其设计是合理有效的,对数学模型的计算结果来说,其建立是正确的,且结果接近磁轴承实际运行情况下的结果。
[1] 朱熀秋,沈玉祥,邬清海,等.交流混合型磁轴承建模与控制系统[J].中国电机工程学报,2009,29(18):100 -105.
[2] 朱熀秋,张仲,诸德宏,等.交直流三自由度混合磁轴承结构与有限元分析[J].中国电机工程学报,2007,27(12):77-81.
[3] Zhu H,Xie Z,Zhu D.Principles and parameter design for AC - DC three- degree freedom hybrid magnetic bearing[J].Chinese Journal of Mechanical Engineering,2006,19(4):534 -539.
[4] Zhu H,Chen H,Xie Z,et al.Configuration and control for AC -DC three degrees of freedom hybrid magnetic bearings[C]//10th International Symposium on Magnetic Bearings.Martigny,Switzerland,2006.
[5] 王晓琳,邓智泉.无轴承异步电机磁场定向控制策略分析[J].中国电机工程学报,2007,27(27):77 -82.
[6] Zhou Y,Zhu H,Li T,et al.Decoupling control of magnetically levitated induction motor with inverse system theory[C]//CES/IEEE 5th International Power Electronics and Motion Control Conference.Shanghai,China,2006:1 -5.
[7] Tera T,Yamauchi Y,Chiba A,et al.Performances of bearingless and sensorless induction motor drive based on mutual inductances and rotor displacements estimation[J].IEEE Transactions on Industrial Electronics,2006,53(1):187-194.
