图书馆机器人机械手参数自整定模糊PID控制器设计
2012-06-21杜明芳方建军梁岚珍
杜明芳,方建军,梁岚珍
机器人在很多行业获得了广泛应用,但在图书馆行业却相对薄弱.图书馆应该是引入机器人较为理想的地方,可以展示出机器人的效率.用机器人实现图书馆自动化管理的理念是20世纪90年代被提出的,人们期望借助机器人完成繁杂的图书借阅、上架、下架、清点、整理、传送等重复性工作.目前世界上成功应用图书馆机器人的有德国洪堡大学、美国犹他州大学、日本早稻田大学等.而我国应用智能机器人的无人图书馆至今尚未真正建成.据统计,截止到2003年12月,我国共有公共图书馆2 709家,中等以上规模的图书馆占相当大的比例,是一个潜力巨大的自动化产业.2002年,美国Johns Hopkins大学的J.Suthakom等研制了一种完整意义上的图书馆机器人实验装置.同年,新加坡国立大学K.H.Yuan等研究了基于RFID定位技术的无人化图书馆系统,可利用机器人完成图书存取工作.几乎同一时期,机器人图书馆员实验还在西班牙、日本等国家进行.模糊控制是在该领域已经应用的一种方法[1-4],能够真正将先进控制方法如自适应模糊滑模、自适应神经网络控制应用到图书馆机器人的系统至今尚未研发成功,高精度、快速的PID控制在该领域中的成功应用也少有详细论述.本文研制的图书馆机器人是一种带有视觉导航的智能轮式移动机器人,由自动引导车(automatic guided vehicle,AGV)和车上安装的气动机械手臂组成,机械手臂前端装有摄像头和RFID读写器,采用PC/104系列板卡设计机械手控制器,操作系统采用嵌入式Microsoft Windows CE 5.0,控制算法采用Fuzzy-PID.在样机上进行了控制系统仿真实验,实验结果表明,所设计的系统具有良好的动、静态性能,设计方法合理,设计思路也较先进.
1 机械手控制系统硬件设计
气压传动以空气作为传动介质,将气体的压力能转化为机械能,比液压传动成本更低、更清洁环保,比机械传动控制更灵活、调节方便,并可与电气控制结合,形成便捷高效的电气混合控制.本系统的机器人机械手部分采用气动方式,其机械结构能够完成上下、左右2个方向的运动和夹紧、松开等机械动作,从而完成图书自动取、放操作.通过编程控制气缸流量,进而控制机械手的运动和动作.其操作效果如图1所示.
机械手由手爪、小臂、大臂、腰部和底座组成.大、小臂分别由大臂气缸、小臂气缸活塞杆支撑和驱动.在大、小臂的一端分别装有增量式旋转编码器来实时传回大、小臂的角度信息,用以计算小臂末端手指的空间位置.大、小臂臂长的选择及气缸支撑点的选择根据工作空间的要求经过计算设计得出.

图1 机械手自动取放图书Fig.1 Automatic books drawing and putting operating of the manipulator
机械手采用PC/104嵌入式系统进行控制,其中CPU为研华公司的PCM-3350 PC/104模块;继电输出部分为PCM3725 PC/104模块,负责控制2个电磁换向阀SY3220,进而控制腰部摆缸及手爪气缸运动;D/A转换模块为PCM3712 PC/104模块,负责控制气缸两腔的气体流量,从而控制大、小臂气缸活塞杆运动;数据采集部分由2个增量式旋转编码器E6B2-CWZ3E将正交编码信号传送至E63-WF5C方向识别单元,信号被转换成单路计数脉冲及方向标识信号后送入PM536 PC/104计数器模块计数,进而可计算出目标图书的空间坐标位置.模块化的图书自动取放机械手的控制系统原理如图2所示.
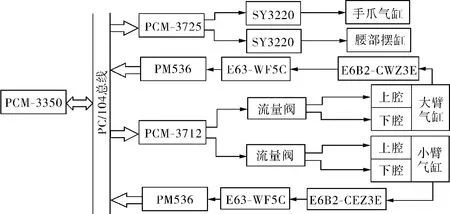
图2 机械手控制系统Fig.2 The control framework of the manipulator
2 机械手模糊PID控制设计
2.1 控制算法的选择
机械手的智能控制是工作在无人化图书馆中的机器人的关键技术,控制算法的选择是关键中的关键.线性PD控制是工业机械手最基本的控制方法,已经得到了广泛的应用.但实践表明,线性PD控制往往要求驱动机构有很大的初始输出,而实际驱动机构往往不可能提供过大的初始力矩,且机械臂本身所承受的最大力矩也是有限的,这使PD控制的应用受到了限制[4].传统的PID控制方法虽然能使系统获得良好的稳态精度,但系统的快速性和抗干扰能力及对系统参数摄动的鲁棒性都不够理想.
模糊控制是基于模糊推理,模仿人的思维方法,其主要特点是:控制系统设计依据经验和操作数据,而不需要精确的数学模型;具有较强的鲁棒性;应用语言变量而非数学变量;推理过程采用“不精确推理”[5].模糊控制系统具有很大的灵活性,提供了一种提高伺服系统的跟随和抗干扰性能的好方法,有力地提高了系统的鲁棒性.为此,本设计将模糊控制技术和传统的PID控制相结合,有效地解决了模糊控制存在的稳态误差缺陷,从而具备了模糊控制较强的鲁棒性和削弱PID控制稳态误差的功能.
模糊PID通过找出PID 3个参数与误差e和误差变化率ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理对3个参数进行在线修改以满足不同e和ec时对控制参数不同的要求,从而使被控对象有良好的动、静态特性.模糊PID以误差e和误差变化率ec作为控制器的输入,以KP、KI、KD作为控制器的输出,运用模糊控制规则自动实现对PID控制参数在线修改.其结构如图3所示.本系统的受控量是机械手大、小臂的运动角度,图3中的θ1(t)为目标角度,θ2(t)为实际角度.
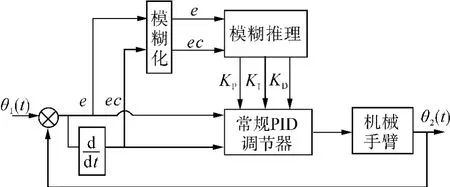
图3 模糊PID控制器的结构Fig.3 Structure of the fuzzy-PID controller
2.2 模糊控制器设计
系统误差e、误差变化率ec、气缸流量控制电压u以及KP、KI、KD采用7段模糊子集{负大,负中,负小,零,正小,正中,正大}描述,记为{NB,NM,NS,ZO,PS,PM,PB}.论域划分为:e={-6,-5,- 4,- 3,- 2,-1,0,0+1,+2,+3,+4,+5,+6},ec={-6,-5,- 4,- 3,- 2,-1,0,+1,+2,+3,+4,+5,+6},u={-6,-5,- 4,-3,- 2,-1,0,+1,+2,+3,+4,+5,+6}.
将e、ec、u设计成三角形隶属度函数,其隶属度函数如图4所示.从系统的稳定性、响应速度、超调量和稳态精度等方面考虑,综合KP、KI、KD对系统的不同作用以及它们之间的相互作用关系,建立的模糊校正规则如表1~3所示.
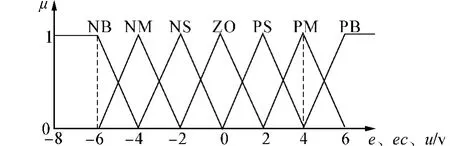
图 4 e、ec、u 的隶属度函数Fig.4 Membership functions of e,ec and u
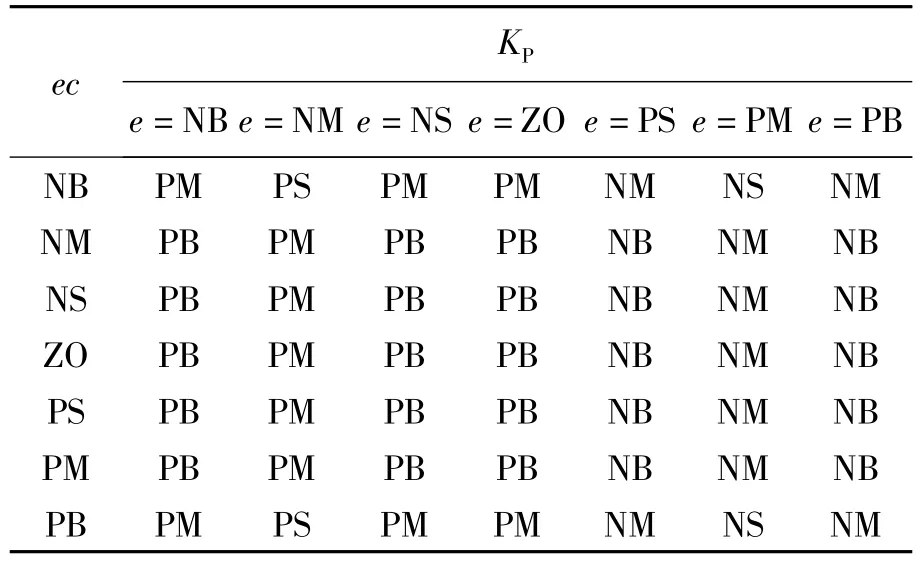
表1 KP的模糊规则Table 1 The fuzzy logic rules of KP
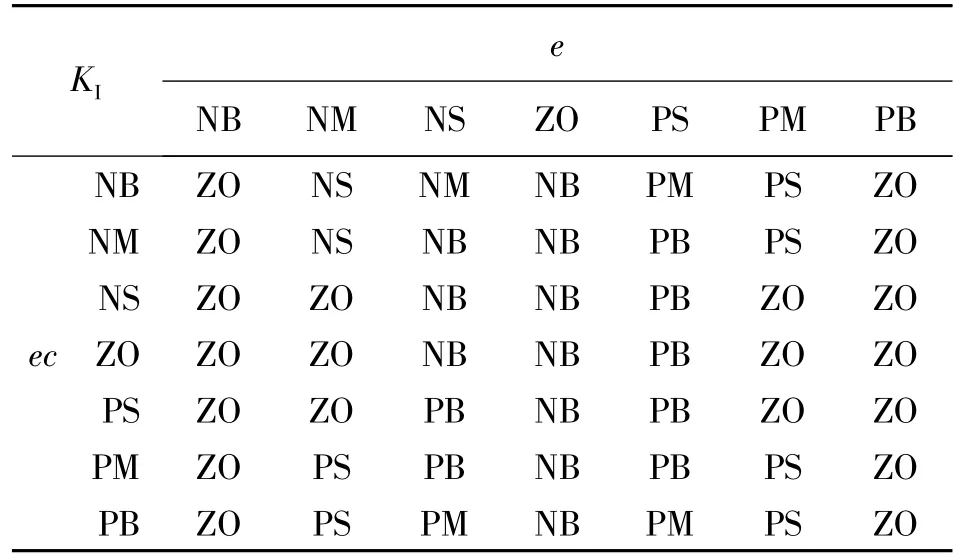
表2 KI的模糊规则Table 2 The fuzzy logic rules of KI
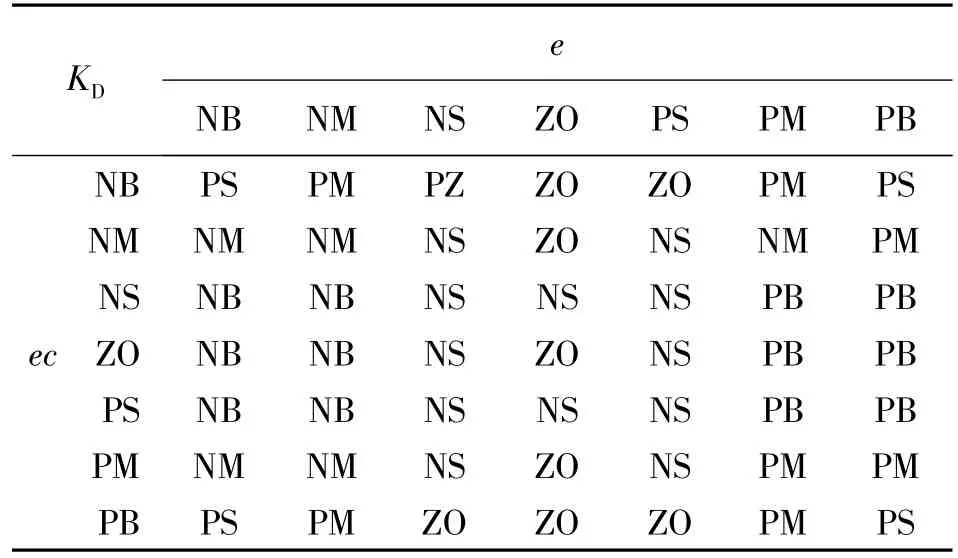
表3 KD的模糊规则Table 3 The fuzzy logic rules of KD
以上每张模糊规则表产生49条规则,用以下IF-THEN形式的语句来描述每一条模糊推理规则:

式中:Pr1、Pr2、Qr(r=1,2,…,7)在前面已定义的模糊集合{NB,NM,NS,Z,PS,PM,PB}中取值.
模糊PID的实现是根据模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数并对上一次采样时的PID参数进行更新.在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正.
3 控制程序设计与实现
Microsoft eMbedded Visual C++(EVC)是嵌入式系统Windows CE 5.0应用程序的集成开发环境,具有编译应用程序、远程调试应用程序等功能.本系统的控制程序在上位机的EVC 4.0下离线开发,编译成功后,下载到PC/104控制板.
机械手模糊PID控制软件流程图如图5所示.
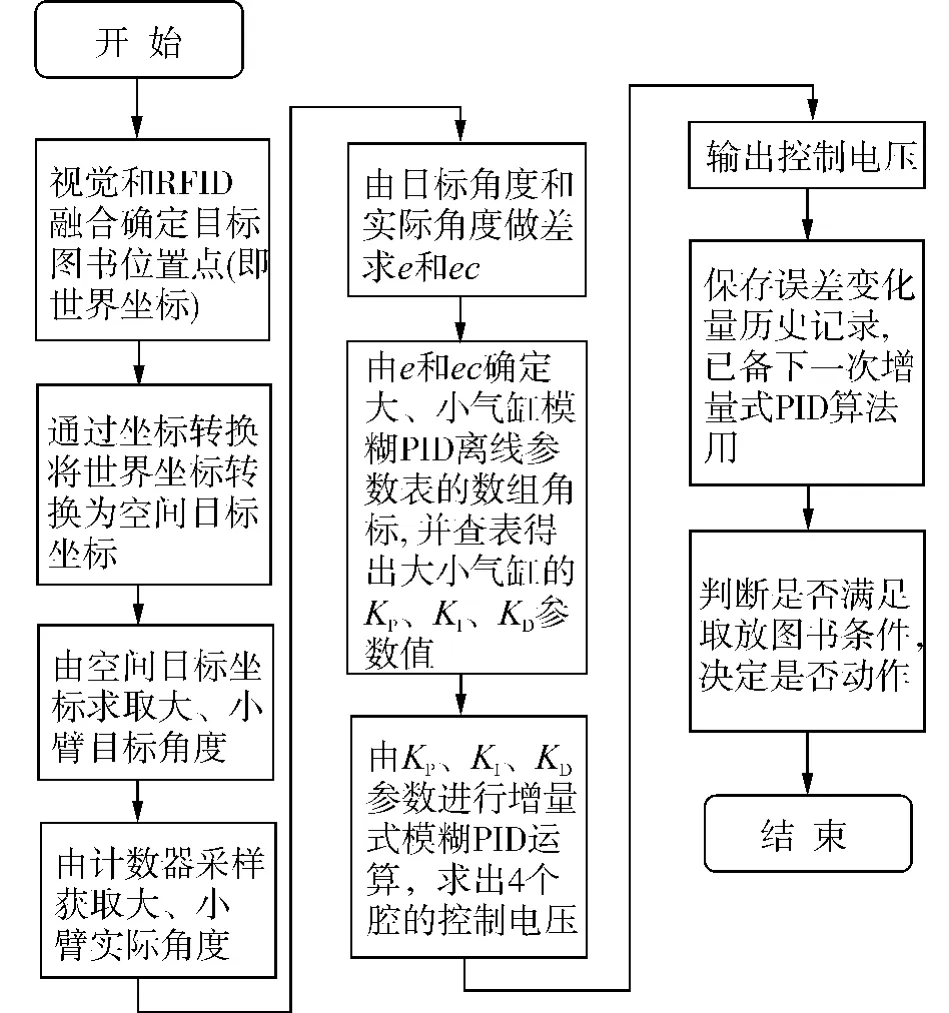
图5 机械手模糊PID控制流程Fig.5 The fuzzy-PID control flow of the manipulator
模糊PID控制算法在OnTimerUp()函数中实现,该函数中的代码将在系统启动后每10 ms执行一次.算法的入口变量有:1)m_TargetAngle,即目标角度(°),由程序界面设定而得;2)m_RealAngle,即实际角度(°),每隔10 ms刷新一次.目标角度和实际角度都以水平面为基准,范围为[0°,90°].算法出口变量为PM.su,即气缸流量控制电压(V),在输出[0,5]时活塞杆收回,[5,10]时活塞杆伸出,在实际输出时将被限幅为[1,9].控制程序将根据2个入口变量及控制算法实时计算出气缸流量控制电压,并输出给机械手气缸.
4 控制效果实验
4.1 PID参数模糊自整定
为验证算法的控制效果,选择不同的输入信号类型、不同的目标角度,进行PID参数模糊自整定,观察实验结果.
PID参数模糊自整定是找出PID 3个参数与偏差e和偏差变化率ec之间的模糊关系,在运行中不断检测e和ec,根据模糊推理对3个参数进行在线修改,以满足不同e和ec对控制参数的不同要求,从而使被控对象具有良好的动、静态性能.根据以下规则调整模糊PID控制器[6-7]:
1)当e较大时,为加快系统响应速度,应取较大的KP和较小的KD,由于积分太强会使系统超调加大,因而要对积分作用加以限制,通常取KI=0或者较小值.
2)当e和ec中等大小时,为减少系统超调和保证一定的响应速度,KP应适当取小些,同时KD的取值对系统影响很大,也应取小些,KI的取值要适当.
3)当e较小时,为减小稳态误差,KP与KI应取得大些,在这种情况下,KD的取值要适当,取值不当会引起系统震荡.其原则是:当ec较小时,KD取大些,当ec较大时,KD取较小值;通常KD为中等大小.
4.2 阶跃响应实验
输入信号类型为阶跃信号,当目标角度分别为10°、30°时,小臂气缸阶跃响应如图6所示.
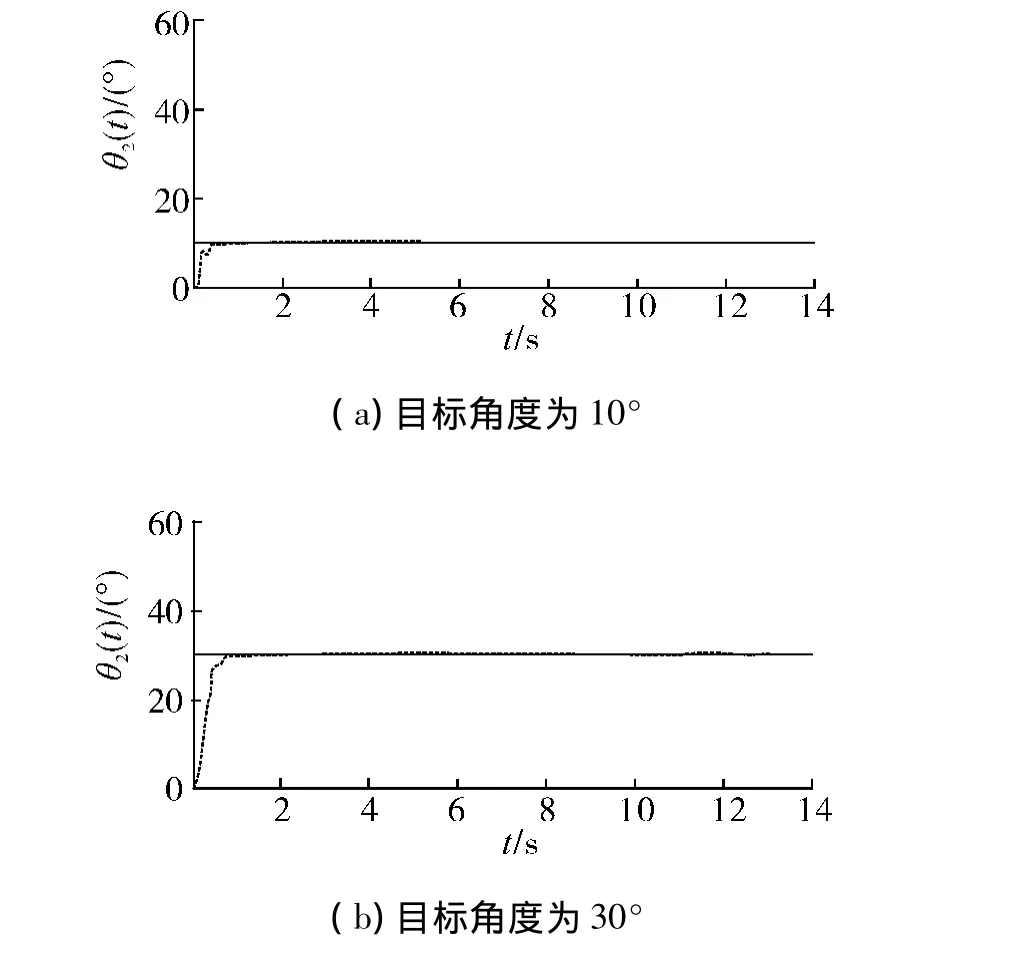
图6 小臂气缸阶跃响应Fig.6 Step response of the cylinder driving forearm
从阶跃响应效果图可看出,机械手小臂在目标角度分别为 10°、30°时,调整不同的KP、KI、KD参数组合,可得到不同的上升时间及超调量.较理想的上升时间结果是:目标角度 10°、30°时分别为0.5 s、0.8 s.2种情况下输出值都几乎等于目标值,实验结果表明,小臂能够快速、无误差地跟踪系统给定值.
4.3 正弦响应实验
为测试算法对不同输入信号的效果,再给定正弦信号,在不同频率下对小臂气缸进行气缸正弦响应(平均值20°,振幅5°)实验.
当正弦信号频率分别为0.1 Hz、0.5 Hz时,小臂气缸正弦响应如图7所示.
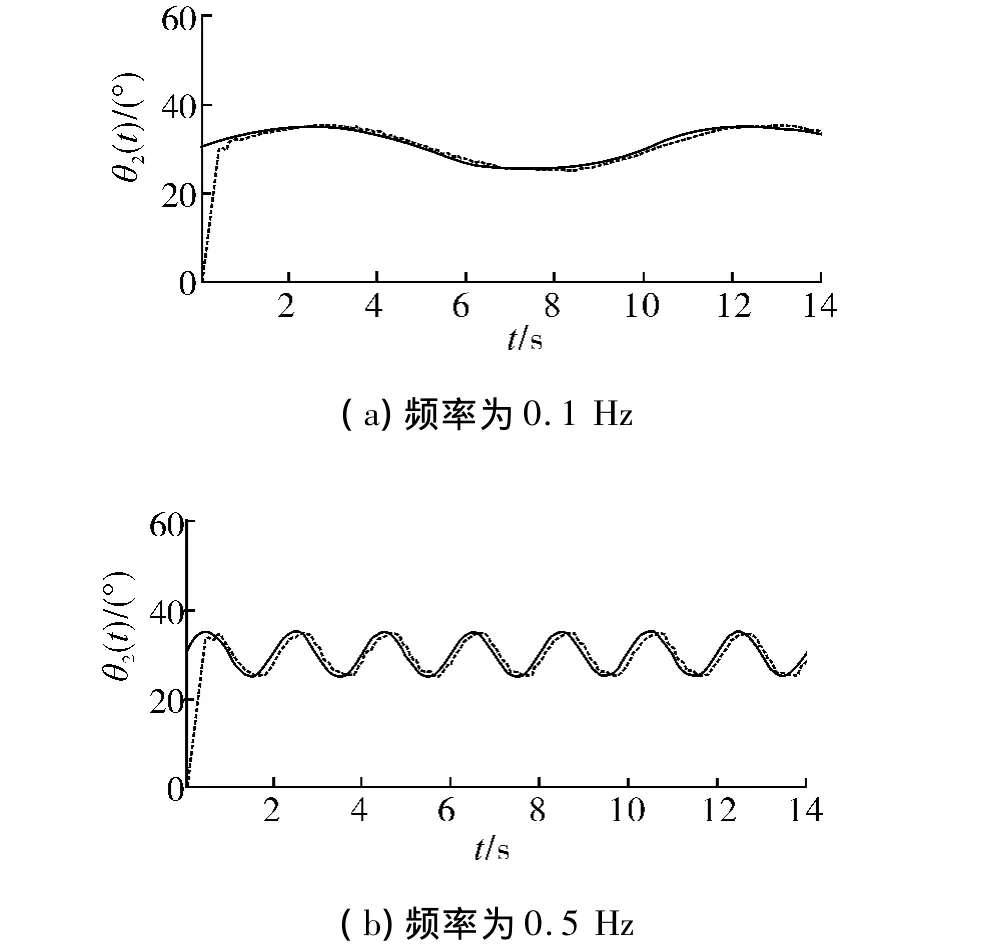
图7 小臂气缸正弦响应(振幅5°)Fig.7 Sine response of the cylinder driving forearm(with a 5°amplitude)
从正弦响应效果图可看出,机械手小臂在目标角度分别为 30°,频率分别为0.1 Hz、0.5 Hz时,调整控制程序中不同的KP、KI、KD参数组合,得到的响应曲线有所不同.经反复实验和调整,得到的较理想的上升时间分别为0.9 s(频率为0.1 Hz)、0.6 s(频率为0.5 Hz).不同频率下输出值都比目标值稍有滞后,但滞后量很小.实验结果表明,小臂能够快速、几乎无误差地跟踪系统给定值.
大臂气缸的控制效果验证实验与小臂气缸类似,不再赘述.
5 结束语
1958年美国联合控制公司研制出第一台机械手,在此基础上又试制成一台数控示教再现型机械手.1962年美国机械制造公司也成功研制出一种叫Vewrsatran的机械手.这2种机械手是国外工业机械手发展的基础.1978年美国Unimate公司和斯坦福大学、麻省理工学院联合研制出一种Unimate-Vicarm型工业机械手,用小型计算机进行控制.日本是工业机械手发展最快、应用最多的国家,自1969年从美国引进2种机械手后大力从事机械手的研究.我国的工业机器人从20世纪80年代“七五”科技攻关开始起步,和国外比仍有一定距离,总的特点是:可靠性低、应用领域窄、应用规模小、生产线系统技术与国外比有差距.目前,工业机械手大部分还属于第1代,主要依靠工人进行控制.第2代机械手用微型电子计算机控制,具有视觉、触觉,甚至听、想的能力.第3代机械手则能独立完成工作过程中的任务,并逐步发展成为柔性制造系统FMS和柔性制造单元FMC中的重要一环.
模糊控制从诞生到现在仅经历了二三十年的时间,但已在一些领域取得了很好的研究成果,展示了其处理无精确数学模型、非线性、时变和时滞系统的强大功能[4],但模糊控制仍有许多理论和设计问题亟待解决.本文所述项目研制的图书馆机器人系统在设计实践中应用了模糊控制理论,结合实际需求对模糊控制器进行了参数自整定的优化设计,用实验结果有力地说明了模糊控制器具有较强的鲁棒性和稳定性.自适应模糊滑模、自适应神经网络控制等先进算法及其与RFID技术的结合在本系统中的应用是下一步研究的重点,期望通过几种算法的比较最终确定出一种最优控制策略[8-10].
本文的研究工作拓展了我国机械手产业的应用领域,在图书馆自动化领域做了开创性的研究工作,并通过大量仿真实验基本形成了一套可行性较强的技术方案.所研制的样机基本上属于第3代智能机械手,在无人干预的情况下可取代馆员完成图书管理工作,为无人图书馆的实现奠定了基础.
[1]SUTHAKOM J.A robotic library system for an off-site shelving facility[C]//2002 IEEE International Conference on Robotics& Automation.[S.l.],Washington.USA,A-merica,2002:201-203.
[2]YUAN K H,HONG A C,ANG M,et al.Unmanned library:an intelligent robotic books retrieval&return system utilizing RFID tags[C]//2002 IEEE International Conference on Systems,Man and Cybernetics.London,UK,2002:50-55.
[3]KUO T C,HONG B W,HUANG Y J,et al.Adaptive fuzzy controller design for robotic manipulators with sliding mode control[C]//2008 IEEE International Conference on Fuzzy Systems.Hong Kong,China,2008:581-586.
[4]刘金琨.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社,2008:30-40.
[5]张毅,罗元,郑太雄,等.移动机器人技术及其应用[M].北京:电子工业出版社,2007:100-105.
[6]周芸,李维,路青起.基于模糊PID控制算法的恒温石英晶体振荡器[EB/OL].[2011-04-17].http://www.autooo.net.
[7]HADA H,KAWAKITA Y,YOJIROUO.A field experiment report:publishing of an auto-ID enabled book[EB/OL].[2011-9-15] .http://www.autoidlabs.org/single - view/dir/article/6/182/page.html.
[8]ISHIKAWA T,YUMOTO,Y,KURATA M,et al.Applying auto-ID to the Japanese publication business to deliver advanced supply chain management,innovative retail applications,and convenient and safe reader services[EB/OL].[2011-9-15].http://www.autoidlabs.org/uploads/media/KEI- AUTOID - WH004.pdf.
[9]王宗义,李艳东,刘涛,等.移动机器人的自适应模糊滑模动力学控制[J].哈尔滨工程大学学报,2011,32(6):793-796.WANG Zongyi,LI Yandong,LIU Tao,et al.Dynamic control of mobile robots based on an adaptive fuzzy sliding mode[J].Journal of Harbin Engineering University,2011,32(6):793-796.
[10]PARK B S,YOO S J,PARK J B,et al.Adaptive neural sliding mode control of nonholonomic wheeled mobile robots with model uncertainty[J].IEEE Transactions on Control Systems Technology,2009,17(1):207-210.