传输型立体测绘相机几何精度仿真分析
2012-03-05张继友
张继友
(北京空间机电研究所,北京 100076)
1 引言
测绘相机由胶片型向传输型转变是目前测绘相机发展的主流。而相应的几何精度测试方法也应该跟上测绘相机的发展。现有的国军标《星载摄影相机性能试验方法》中只是针对胶片型测绘相机几何精度测试方法进行了规定。而目前针对传输型测绘相机几何精度测试方法都是从传统胶片型测绘相机几何精度测试方法中演变而来,归纳起来常用的主要有以下3种方法:光学精密测角法、光电精密测角法、平行光管组法[1]。测量方法的选用需要根据实验条件和被测对象的具体情况来确定。
然而无论采用上述的哪种方法,畸变、主点和主距的计算公式推导一般都是根据被测相机旋转的角度和CCD采样的星点移动的位移,基于最小二乘法而得来的。因此都可以归纳为测角方法。本文对现有的测试方法进行了较为全面的仿真分析,指出了它们的缺点和不足,为测绘相机设计和测试人员提供参考。
2 内方位元素基本测量原理
采用测角法测量传输型立体测绘相机内方位元素原理如图1所示。图中,N′为被测相机物镜的后节点,O为像面中心,P为像面主点位置,p为像面主点相对于像面中心的距离。△W是主点和像面中心偏差所成的角度,f为被测相机主距,Hi为测量点,H′i为被测点的理想位置,Li为Hi距像面中心O点的距离,Wi为对应Hi点的偏角,Di为畸变。

根据图中的几何关系,可以列出对应Hi点的畸变计算公式:

因为主点的偏移量一般很小,所以tan(Wi-△W)项可以用泰勒公式近似,即

因此畸变公式可以简化为:

为了从方程(2)中确定相机的各个内方位元素,一个比较合理的求解条件是使畸变的平方和最小。求解该超定方程组。得到主点、主距的表达式:

如果忽略主点的影响,即p=0,可以得到:

如果相机的主距f已知,可以得到:

根据测得的星点像质心位移Li和相机旋转的角度Wi,利用公式(3)求出主点p和主距f的解,然后再将主点p和主距f代入公式(2)解出对应各点的畸变值Di。
3 内方位元素测试方法
与传统胶片型相机不同的是,传输型测绘相机装调完成之后,CCD焦平面组件已被固定,所以无法如胶片型相机那样用网格板法进行测量。传输型测绘相机测试原理简图如图2所示。被测相机通过专用工装安装在精密转台上,调整被测相机入瞳与转台水平旋转轴重合,相机光轴与转台水平旋转轴垂直,同时调整被测相机光轴与平行光管光轴平行,使得相机从视场一端扫描到另一端过程中,星点像始终成像在CCD靶面上。被测相机的信号采集系统接收位于相机焦面的CCD信号,利用相关算法计算星点靶标像的质心位置和位移。需说明的是,图2为示意图,实际测试时,5及其支架要相对于图中的转台中心旋转90°放置。

被测相机旋转的角度量一般通过转台读取,或者通过专用测角装置测得(此时,转台只是提供旋转,不用来测角)。线量通过被测相机CCD读取星点靶标像,并利用相关算法计算靶标像质心的位移而获得。
4 内方位元素测试精度仿真分析
为了得到内方位元素测试的主要影响因素,有针对性的提高内方位元素测试精度,本文对内方位元素误差传递公式进行了推导,并利用现有条件对其测试精度进行了仿真分析。
4.1 输入条件
目前转台的测角精度一般为1″以下,为了得到更高的测角精度,采用专门的精密测角装置可以实现0.2″的测角精度。
而靶标像质心算法采用像元内插细分算法,精度可以达到0.1像元,一般测绘相机的像元尺寸为10μm以下,可以得出星点像质心位移精度δL≈1μm。
4.2 主点位置、主距测试精度仿真分析
主点、主距测量精度均与内方位元素算法的精度有关,理论上应该由内方位元素测量方程(2)决定。但是公式(2)中,各个变量之间的关系非常复杂,几乎不可能用解析的方法研究测量精度。而在实际上,相机本身的主距误差和主点位置偏差都很小,所以在研究主距的测量误差时,可以将主点偏差的影响忽略,从而可以根据公式(4)进行计算,则主距测试误差δf的计算公式为:

式中δL 为Li 的测试误差,取决于星点像质心算法精度;δW 为角度Wi 的测试误差;FL 为星点像质心位移误差传递系数;FW 为角度误差传递系数。
同样,计算主点测量误差δp 时,忽略主距的影响,则主点测试误差计算公式为:

式中 PL为星点像质心位移误差传递系数;PW为角度误差传递系数。
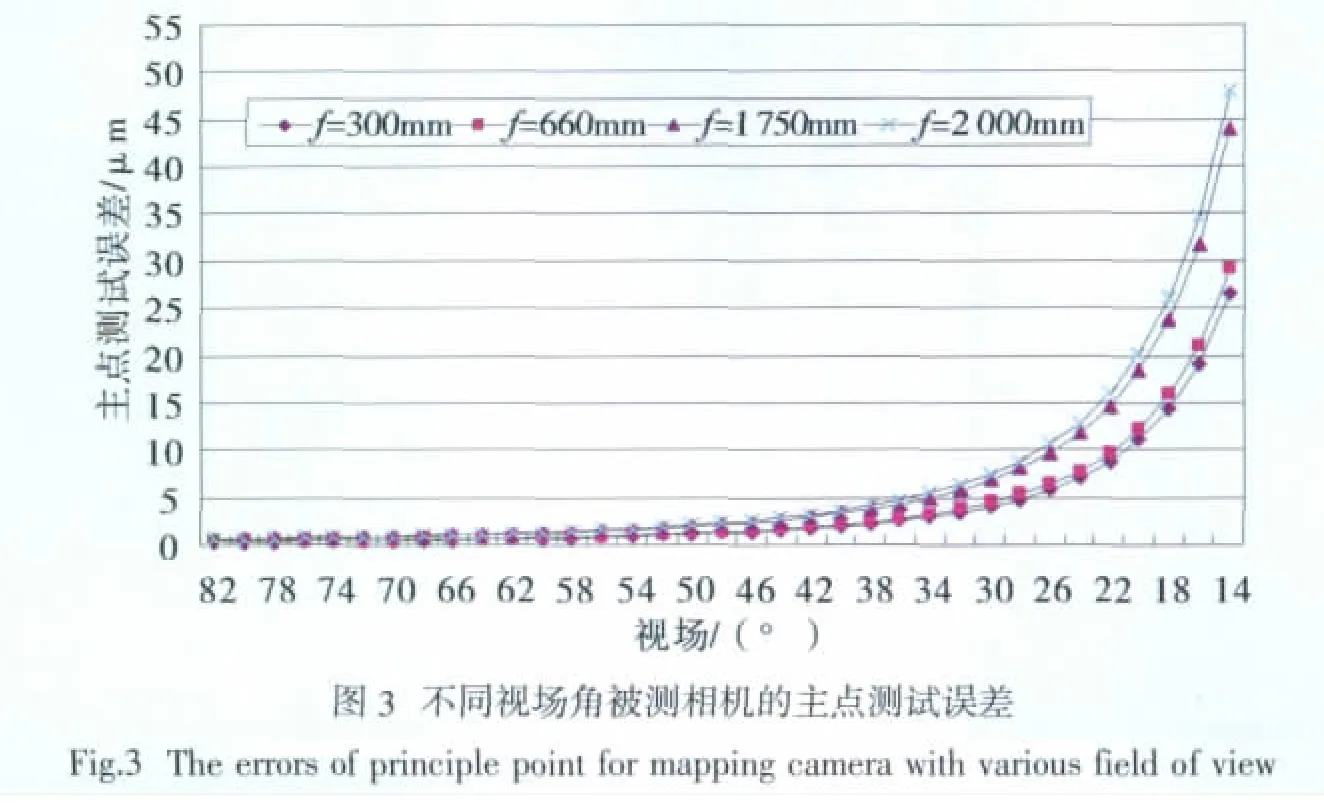
比较公式(6)和(7)可以看出,对于小视场角测绘相机来说,由于PL和PW均大于FL和FW,因此在同等测量条件下,主点的测试精度要小于主距的测试精度。随着被测相机视场角的减小,两者的测试精度降低,且主点的测试精度下降的更大。计算几种测绘相机主点、主距的测试精度,结果如表1所示。已知条件,线量测试误差 δL=1μm,角度的测试误差 δW=0.2″。

?
既然主点、主距测试精度与视场角和焦距有关,图3和图4列出了被测相机在不同焦距、不同视场角情况下主点、主距测试精度分析曲线,该仿真分析曲线可供研发人员设计时参考。

4.3 畸变测量精度仿真分析
畸变的测量误差δD应包括4个来源,即星点像位移测量误差δL,角度测量误差δW,主点位置测量误差δp,主距测量误差 δf,其表达式为:

由上式可以看出,主点的测试精度对畸变测试精度的贡献较小,因而在被测相机的视场角很小的情况下,虽然主点的测试精度不高,但是对畸变测试精度的影响不大。另外,由于角度测量误差的系数比较大,因此对畸变测量的影响较大。
根据某测绘相机参数,设计焦距正视相机 f=1 750mm,视场角 2ω=13.6°。 代入已知条件,δL=1μm,角度Wi的测试误差δW=0.16″,分别间隔0.25°,0.5°和1°进行畸变测试,得到的不同视场的畸变测量误差仿真曲线图如图5~图7所示。


从图5~图7可以看出,测量点数越多,畸变测试误差越小。但同时也可以看出,虽然被测相机视场角不大,但是畸变测试误差也没有超过2.2μm,也就是说畸变测试误差与被测相机视场角关系不大。
5 结束语
本文根据最小二乘原理,推导了测绘相机内方位元素测试误差传递公式,通过仿真分析,给出了影响主点、主距和畸变测试精度的关键因素,得出的结论如下:
畸变测量误差随着被测相机视场角的增大而变大,在边缘视场有最大值;仪器的测角误差是畸变误差的主要来源,因而提高测角精度是关键所在;主点、主距测试误差与被测相机设计的视场角有关,被测相机设计的视场角越小,主点、主距的测试误差越大,而且随着被测相机视场角的减小,主点的测试精度下降的更大;被测相机视场角很小时,虽然主点测试精度降低,但是由于主点测试精度对畸变测试的贡献小,因而被测相机的视场角对畸变测试精度影响不大。
以上结论可以为测绘相机设计和测试人员提供参考。
(References)
[1] 王之江.光学技术手册(下册)[M].北京:机械工业出版社,1994:463-467.WANG Zhijiang.Optical Technical Manual[M].Beijing:China Machine Press,1994:463-467.(in Chinese)
[2] 王任享.三线阵CCD影像卫星摄影测量原理[M].北京:测绘出版社,2006:69-77.WANG Renxiang.Satellite Photogrammetric Principle for Three-line-array CCD Imagery[M].Beijing:Surveying and Mapping Press,2006:69-77.(in Chinese)
[3] 吴国栋,韩冰,何煦.精密测角法的线阵CCD相机几何参数实验室标定方法[J].光学精密工程,2007,15(10):1628-1631.WU Guodong,HAN Bing,HE Xu.Calibration of Geometric Parameters of Line-array CCD Camera Based on Exact Measuring Angle in Lab[J].Optics and Precision Engineering,2007,15(10):1628-1631.(in Chinese)
[4] 杨秉新.国外航天侦察相机和测绘相机发展概况[J].航天返回与遥感,1998,19(2):47-52.YANG Bingxin.The Development Survey of Foreign Space Reconnaissance Camera and Mapping Camera[J].Spacecraft Recovery&Remote Sensing,1998,19(2):47-52.(in Chinese)
[5] Thurlow P E,Cline R W.Measurement of MODIS Optics Effective Focal Length,Distortion,and Modulation Transfer Function[J].SPIE,1939:47-52.
[6] 胡燕,胡莘,王新义.偏流角对星载三线阵相机摄影的影响[J].测绘科学,2006,31(4):62-63.HU Yan,HU Xin,WANG Xinyi.The Influence of Drift Angle on Satellite Photography of Three-line Array Camera[J].Science of Surveying and Mapping,2006,31(4):62-63.(in Chinese)
[7] 王东,冯文灏,卢秀山.基于多片空间后方交会的CCD相机检校[J],测绘科学,2006,31(4):64-66.WANG Dong,FENG Wenhao,LU Xiushan.CCD Camera Calibration Based on Space Resection with Multi-image[J].Science of Surveying and Mapping,2006,31(4):64-66.(in Chinese)
[8] Ohlhof T,Kornus W.Geometric Calibration of Digital Three-line CCD Cameras[C].International Archives of Photogrammetry and Remote Sensing,1994,30:71-81.
[9] Lehner M,Kornus W.Digital Photogrammetric Processing of MOMS-02/D2 Magery[J].ISPRS Congress Commission 111/WG2,1996,7:9-19.
