三线阵相机视轴夹角及线阵平行性装调测试
2012-03-05岳丽清张继友伏瑞敏2马丽娜
岳丽清 张继友伏瑞敏,2马丽娜
(1北京空间机电研究所,北京 100076)(2西北工业大学,西安 710072)
1 引言
在摄影测量中,测绘相机是获取原始影像信息的关键设备,测绘相机的功能不仅要能识别地面目标,还要能够对目标精确定位,以建立和维持高精度的时空基准[1-2]。对于采用线阵CCD作为探测器的测绘相机一般采用2台或3台相机成像,这种成像方式类似于从以往大画幅胶片上面抽取3条线阵进行推扫成像[3]。因此,对于采用多台线阵CCD相机组合的测绘相机来说,除了以往的主点、主距和畸变等常规内方位元素参数需要精确校准之外,还需要对多相机间的光轴夹角位置进行精确标定,同时各相机CCD线阵要求严格平行[4-6]。
对于高精度立体测绘相机一般要求多相机间夹角测试精度满足5″,CCD线阵关系不平行度测试精度15″。而传统侦查类相机的测试、安装工艺远远不能满足测绘类需求。针对以上问题,本文提出了一种三线阵相机光轴夹角及线阵平行性测试的新方法,分析了测试精度,并用该方法对某相机进行了装调测试,结果表明该方法切实可行。
2 三线阵相机空间布局特点和装调测试难点
2.1 三线阵相机空间布局特点
三线阵测绘相机的光电扫描成像部分是由光学系统焦面上的3个线阵CCD组成的。这3个线阵CCD相互平行排列并与航天飞行器飞行方向垂直。当航天飞行器飞行时,3个线阵CCD相机以一个同步周期N连续扫描地面景物并产生3条航带图像A′,B′,C′。这3个线阵CCD相机的成像角度不同,如图1所示,B为正视相机,A为前视相机,C为后视相机。因此推扫所获得的航带图像的视角也各不同,从而可以构成立体影像[7-10]。

2.2 装调测试难点
为保证图像成像品质,三线阵相机在装调测试过程中需要保证3台相机间视轴夹角的装配精度。考虑到3台相机存在不共面的情况,因此如何完成高精度的装调测试成为三线阵相机研制过程中的一大难点。
另外,相机研制过程中还需要保证3台相机的线阵平行性。传统的利用经纬仪瞄准TDICCD的测试方法远远达不到测绘相机所需的测试精度,因此需要采用新的方法来提高相机线阵平行性的装调测试精度。
3 三线阵相机像面装调测试方法
3.1 装调测试过程
针对三线阵相机的特点,本文提出了一种焦面装调测试的方法,如图2所示。将相机支架架设到二维转台工作面上,通过经纬仪测试并调整相机支架基准镜与平行光管的光轴,建立两者的空间关系。安装相机主体,调整二维转台,并利用平行光管的自准直功能对相机视轴进行精确瞄准,之后再进行3台相机线阵平行度和视轴夹角的装调测试工作。其中平行光管放置在三维调整台上,可以沿着X轴和Y轴平移以及绕Z轴方向旋转,平行光管的3个地脚可以实现其自身的俯仰功能。a、b、c为3个共面的平面反射镜,通过专用工装安装在平行光管上,可以随着平行光管作相应移动。

平行光管焦面处安装十字靶标,装调测试时,首先瞄准被测相机视轴,然后沿着被测相机视场方向旋转转台,对TDICCD进行整个视场扫描,并据此调整被测相机调节机构或者修磨调整垫片,直至将TDICCD在整个视场内调平,以此保证相机的线阵平行性。同时,记录相机视轴与平行光管光轴平行时转台的示数(,)(其中为转台水平轴的示数,为转台俯仰轴的示数)。用同样的方法调整另外2台相机的线阵平行性,并分别记录相机视轴与平行光管光轴平行时转台的读数()。该 3组读数之间便可反映出三线阵相机的视轴夹角。
整机测试时,由于场地限制只采用1台平行光管进行测试,在单台测试完成更换相机时,需调整二维转台和承载平行光管的平移台,依次完成对剩余相机的瞄准、测试、计算。由于在测试过程中以平行光管为基准,在平行光管平移过程中其位置肯定会发生变化,因此需要对平移过程中平行光管产生的角度偏移量进行实时监视以补偿该量。本文采用光电经纬仪和特殊定制的小平面反射镜组件(图2中的a、b、c)监视平行光管的变化量。为保证视轴夹角的装调测试精度,测试前需使用干涉仪装调相邻2个平面反射镜,使得3个平面反射镜位于同一个平面内,并需要精确测量出3个反射镜之间的角度关系。
视轴夹角测试时,在二维转台俯仰轴中心处安装3面反射棱镜,其相邻面之间的夹角与三线阵正视与前视、前视与后视之间的视轴夹角数值相等。在调整转台俯仰过程中用光电自准直仪监视三面反射棱镜,以此得到()的精确数值,提高测试精度。
3.2 装调测试结果
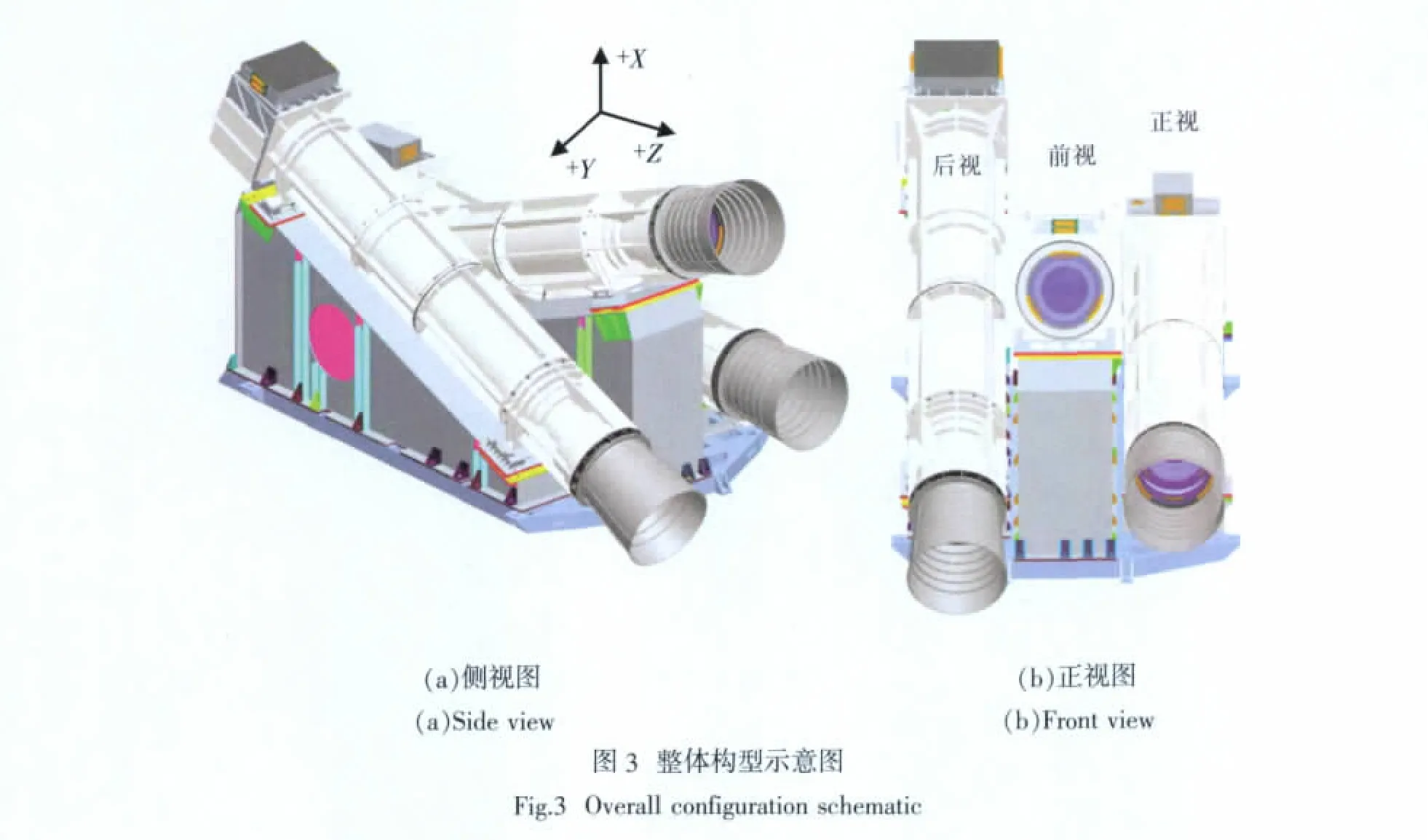
按照上述的装调方法,完成了“资源三号”三线阵测绘相机TDICCD像面的装调,相机的示意图和坐标关系见图3所示。经过精密测试和计算,得到3台相机之间的视轴夹角测试结果,如表1所示。视轴水平方向偏角示意图如图4所示。三线阵测绘相机线阵平行性的测试结果如表2所示。

?


?
3.3 测试装调精度分析
3.3.1 3台相机视轴夹角测试精度的影响因素
3台相机视轴的夹角测试精度主要取决于转台测角精度、平行光管平移精度、光电测角精度、靶标像质心定位精度、沿TDICCD级数方向指向精度以及平行光管光轴和相机视轴对准精度。
转台测角精度引入的误差δ1。转台只是实现相机旋转功能,测角依靠光电自准直仪实现。因此,该项误差体现在精密测角精度上,这里不计。
平行光管平移过程中引入的测角误差δ2。平行光管平移过程中引入的测角误差通过1台光电自准直仪和1台光电经纬仪来监视。光电自准直仪精度为0.5″,利用干涉仪装调3块平面反射镜,其测试调整误差为0.5″以内,光电经纬仪精度优于 2″,则
精密测角精度引入的误差δ3。精密测角误差取决于测试设备的精度,测试设备在测试前通过专门计量机构进行计量,现有设备可以实现优于0.54″的测角精度。
靶标像质心位置计算误差δ4。靶标像质心计算软件的精度优于0.1个像元,因而δ4=arctan(0.1×l/f),其中l为被测相机TDICCD的像元尺寸,f为被测相机的焦距。带入数值,可得δ4=0.1″。
沿TDICCD级数方向指向误差。这种对准技术通常依据平行光管常规光学检测方法进行调整测试,北京空间机电研究所对此有完善的调整工艺,其对准精度可控制在2μm以内,结合被测相机的焦距,该项引入的角度测试误差为 0.24″,则 δ5=0.24″。
平行光管光轴和相机视轴不平行引入的误差δ6。平行光管光轴与相机的视轴平行调整依据平行光管自准直功能实现,因此该项误差主要取决于平行光管的自准直误差。本测试所采用的4m焦距的平行光管其自准直误差可以达到0.5″。对3台相机分别自准直,则引入的误差
测试误差合成:δθ=
3.3.2 3台相机线阵平行度测试精度的影响因素
3台相机线阵平行度的测试精度主要取决于转台轴系精度、平行光管平移精度、沿TDICCD级数方向指向精度以及平行光管光轴和相机视轴对准精度。
转台轴系精度引入的误差δ1。转台轴系精度可以通过标定来实时修正,标定精度可以达到θ=0.3″,其引入的误差δ=arctan(f×tanθ/L),其中f为被测相机的焦距,θ为转台轴系的标定精度,L为被测相机TDICCD的线阵长度,带入被测相机的参数,可得 δ=3″。 3台相机的测试精度为
平行光管平移精度引入的误差δ2。平行光管平移过程中引入的测角误差通过1台光电自准直仪和1台光电经纬仪来监视。光电自准直仪精度为0.5″,利用干涉仪装调3块平面反射镜,其测试调整误差为0.5″以内,光电经纬仪自准直精度优于 2″,则其中f为被测相机的焦距,L为被测相机TDICCD的线阵长度。
沿TDICCD级数方向指向误差δ3。这种对准技术通常依据平行光管常规光学检测方法进行调整测试,北京空间机电研究所对此有完善的调整工艺,其对准精度可控制在2μm以内,结合被测相机TDICCD的线阵长度,该项引入的角度测试误差为 2.4″,则
平行光管光轴和相机视轴不平行引入的误差δ4。测试所用4m平行光管其自准直误差优于0.5″,对3台相机分别自准直, 引入的误差其中f为被测相机的焦距,L为被测相机TDICCD的线阵长度。
4 结束语
高精度立体测绘相机对多相机间的夹角测试精度与CCD线阵关系不平行度的测试精度要求高,本文提出的利用自准直平行光管、光电自准直仪和3个高精度小平面反射镜组合等形式进行三线阵测绘相机装调测试的新方法,摒弃了以往传统的测试方式,可以达到高精度的装调技术指标要求,容易实现,便于操作,并在某型号相机研制过程中得到了很好的应用,为高精度立体测绘相机的装调提供了依据。
(References)
[1] 焦斌亮,王朝晖,林可祥,等.星载多光谱 CCD 相机研究[J].仪器仪表学报,2004,25(2):146-147.JIAO Binliang,WANG Zhaohui,LIN Kexiang,et al.A Multispectral CCD Camera for Satellite Use[J].Chinese Journal of Scientific Instrument,2004,25(2):146-147.(in Chinese)
[2] 王景山.空间科学与应用[M].北京:科学出版社,2001.WANG Jingshan.Space Science and Application[M].Beijing:Science Press,200l.(in Chinese)
[3] 胡莘.三线阵 CCD 相机设计中的摄影测量问题[J].测绘科学技术学报,1999.19(1):41-45.HU Xin.Photogrammetric Issues in Design of Three-line Array Camera[J].Journal of Zhengzhou Institute of Surveying and Mapping,1999,19(1):41-45.(in Chinese)
[4] 胡莘,曹喜滨.三线阵立体测绘卫星的测量精度分析[J].哈尔滨工业大学学报,2008,40(5):695-699.HU Xin,CAO Xibin.Analysis on Precision of Stereo Mapping Microsatallite Using Three-line CCD Images[J].Journal of Harbin Institute of Technology,2008,40(5):695-699.(in Chinese)
[5] 王智,张立平,李朝辉,等.传输型立体测绘相机的调焦机构设计[J].光学精密工程,2009,17(5):1051-1055.WANG Zhi,ZHANG Liping,LI Zhaohui,et al.Design of Focusing Mechanism of Space Tridimensional Mapping Camera[J].Optics and Precision Engineering,2009,17(5):1051-1055.(in Chinese)
[6] 王任享.我国无地面控制点卫星摄影测量综述[J].海洋测绘,2008,28(5):2-8.WANG Renxiang.Mapping Satellite without Ground Control Point in China[J].Hydrographic Surveying and Charting,2008,28(5):2-8.(in Chinese)
[7] 王智,张立平,李朝辉.三线阵立体测绘相机构像及误差模型的建立[J].光电工程,2010,37(1):95-100.WANG Zhi, ZHANG Liping, LI Zhaohui.Three-linear CCD Camera Imaging and Error Model[J].Opto-Electronic Engineering,2010,37(1):95-100.(in Chinese)
[8] 刘金国,李杰,郝志航.三线阵相机亚像元精度几何标定方法研究[J].光电工程,2004,31(1):36-39.LIU Jinguo,LI Jie,HAO Zhihang.Study on a Geometric Calibration Method for Three-linear-array CCD Camera with Sub-pixel Accuracy[J].Opto-Electronic Engineering,2004,31(1):36-39.(in Chinese)
[9] 王之卓.摄影测量原理[M].北京:测绘出版社,1979.WANG Zhizhuo.The Principles of Photogrammetry[M].Beijing:Surveying and Mapping Press,1979.(in Chinese)
[10] 王任享.三线阵CCD影像卫星摄影测量原理[M].北京:测绘出版社,2006.WANG Renxiang.Satellite Photogrammetric Principle for Three-line-array CCD Imagery[M].Beijing:Surveying and Mapping Press,2006.(in Chinese)