多光谱相机高稳定性光机结构设计技术
2012-03-05蔡伟军范斌张凤芹李庆林魏鑫
蔡伟军 范斌 张凤芹 李庆林 魏鑫
(北京空间机电研究所,北京 100076)
1 引言
“资源三号”卫星是中国第一颗民用立体测绘卫星,卫星通过三线阵相机拍摄高几何定位精度的立体图像,通过多光谱相机影像与三线阵正视相机全色影像的融合处理,确定地形图上主要地物的物理属性,生成彩色正射影像产品。为确保对所观测地物的平面定位精度,用户及卫星总体对多光谱相机在轨内方位元素(主点、主距、畸变)的稳定性也提出了严格的要求。经分析,相机入轨后,引起内方位元素变化的主要因素是由于卫星及相机主体温度的波动产生的结构热变形和热应力[1-2]。另外,相机还要经历严酷的发射环境,因此为了保证入轨后具有良好的成像品质,相机需具有高的力学和热稳定性。
多光谱相机光机主体采用三反离轴光学系统,如图1所示。相机主要包括:主镜组件、三镜组件、次镜组件、平面镜调焦组件、焦面组件、主体框、遮光罩以及柔性卸载装星结构等。

本文从影响相机在轨成像品质和内方位元素稳定性的因素出发,结合三反离轴相机的特点,分别从反射镜支撑设计、高刚度主体结构设计以及柔性卸载装星结构设计等方面重点介绍多光谱相机高稳定性光机主体设计技术。
2 反射镜组件的设计及分析
反射镜组件是遥感相机的核心部件,其面形精度和位置精度直接影响光学系统的成像品质及光学系统内方位元素。在轨真空、热交变等复杂的环境条件将会引起相机结构变化,从而产生的应力传入反射镜将使得面形超差,导致成像品质下降,因此要求反射镜组件具有一定的刚度满足发射环境的同时,具有一定的应力卸载设计,保证反射镜具有较好的稳定性[3-5]。
以主镜为例介绍反射镜的无应力支撑设计。主镜采用多点球铰支撑结构,通过中心1点及侧面3点支撑结构的自由度解耦设计,在支撑框与反射镜之间实现静定支撑,如图2所示。这种静定结构不会将因热不匹配或装配失调产生的外应力传至反射镜[6],从而保证反射镜面形的稳定。

利用有限元分析方法和数值技术手段,对反射镜组件在轨重力释放和在轨温度变化2℃情况下的面形变化和位置变化进行了仿真分析,结果如图3~5所示,图中PV为面形的峰谷值,RMS为面形的均方根值。图3中的最大位移为0.005 54mm,PV值为2.665 7nm,RMS为0.367 7nm;图4中的最大位移为0.011 2mm,PV值为3.003 4nm,RMS为0.508 9nm;图5中的最大位移为0.023mm,PV值为3.627 3nm,RMS为0.463 3nm。


可见,主反射镜组件在自重和温度影响下,最大面形RMS为0.508 9nm,小于1×10-3,反射镜最大位置变化为0.023mm,小于光学系统公差要求的0.04mm。验证了这种多点柔性球铰支撑具有较好的卸载作用,能够保证反射镜在空间环境中面形的稳定[7-8]。
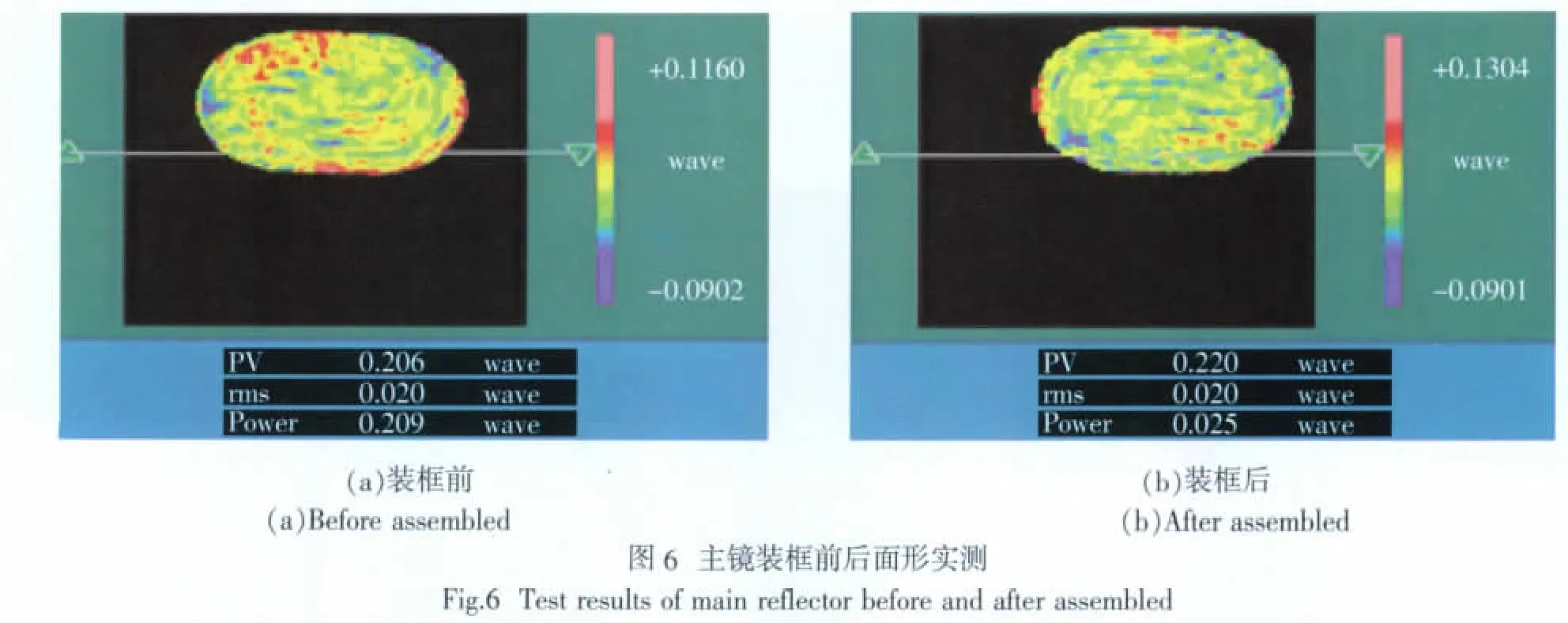
反射镜装框后,在针对不同方向和不同温度(18℃~22℃)环境对反射镜进行了面形检测,结果如图6所示,反射镜面形RMS为状况前后的测试结果均为2×10-2,保持不变,进一步验证了反射镜支撑结构具有较好的应力卸载能力。
另外,根据振动试验结果显示,反射镜组件基频为211Hz,具有较高的设计刚度,能够满足发射段环境要求。
3 主体结构的设计
相机主体结构为相机各重要部组件提供可靠的支撑,保证光学系统所要求的各光学元件与像面之间准确的位置关系,因此,主体结构的主要目标是在一定的体积和质量条件下,满足高刚度、高力学稳定性设计。
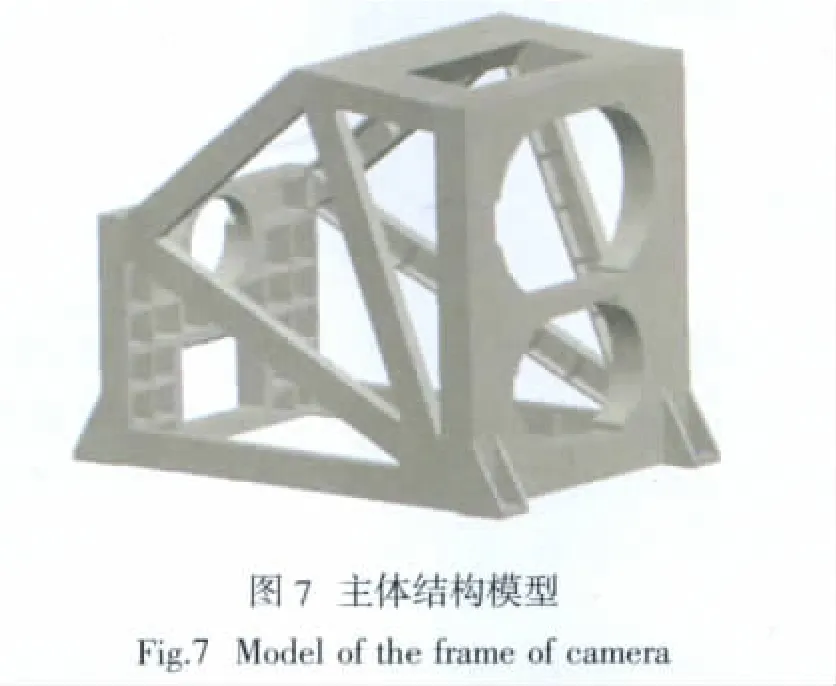
相机主体结构采用钛合金整体铸造框的形式,设计过程中采用拓扑优化设计技术,得到具有较好比刚度的结构布局形式,如图7所示。在主体结构轻量化详细设计过程中,利用尺寸优化技术对各加强筋及面板的厚度进行优化,使其比刚度进一步提高。
相机主体仿真结果如图8所示:1阶模态为151Hz,振型是沿着Y向的摆动,2阶模态是246Hz,振型是沿着Z向的摆动。结构相机振动试验结果为1阶模态146Hz,方向是Y向,2阶模态260Hz,方向是Z向,设计结果与实验结果吻合较好,且能够满足卫星要求。

另外,相机主体随机振动试验结果显示,主镜组件、三镜组件、折转镜组件及次镜组件等测量点的响应均方根放大倍数均不超过3,主体结构具有较好的动力学特性,能够保证相机经过发射段入轨后反射镜位置关系稳定性。
4 相机柔性卸载装星设计
多光谱相机采用三反离轴光学系统形式,对反射镜间的角度关系要求较高(光学公差要求小于10″)。相机主体与卫星顶部构架的热耦合分析显示:当相机主体与载荷舱顶部构架直接连接情况下,如果相机主体与顶部构架出现5℃的温度差,热变形引起的相机反射镜角度变化将超出光学系统公差要求范围(约为40″),直接影响多光谱相机的成像品质和内方位元素,为了提高相机主体的环境适应性,在相机与卫星之间采用了柔性热卸载装星设计。
卸载结构的设计采用柔性铰链原理,通过在4个安装脚处合理选择自由度释放方向使其具有一定程度的热变形卸载能力[9-10],如图9所示。

根据经过优化设计确定的结构形式,建立有限元模型,结合数值计算手段对柔性卸载结构的卸载性能进行分析,分析的工况是相机20℃不变,卫星温度由20℃升高到35℃,即相机与卫星之间存在15℃的温差,计算结构变形后各反射镜相对于原来位置的角度变化情况,结果如表1所示:

?
为直接验证柔性卸载结构的卸载能力,进行了相机在轨热稳定性模拟试验。试验过程中实验室温度控制在(20±1)℃,相机与舱板在该温度下进行装配,试验时相机主体温度不变。为了更大范围的验证不同温度情况下的卸载能力,舱板温度通过主动温控手段由20℃分别升到35℃和40℃,使相机与安装结构间温差达到20℃。过程中测试相机各反射镜的角度变化,为了排除相机支架整体角度变化对反射镜角度的影响,通过测量次镜和三镜相对于主镜的角度变化,得到的结果见表2:

?
试验结果与仿真分析结果基本一致,反射镜倾斜角度满足光学设计要求,柔性卸载结构较好的实现了热变形卸载功能,保证了相机在轨热稳定性及较强的温度适应性。
5 多光谱相机高稳定性验证
为了验证采用多种稳定性设计措施的相机环境适应能力,从相机传函及内方位元素性能层面进一步验证其良好的稳定性能,在多光谱相机研制过程中的振动试验前后以及热真空试验后,对相机内方位元素及传函进行了测试和对比,结果如表3所示。

?
根据总体要求,相机的视主点的标定精度为5μm(0.5像元),视主距的标定精度为优于20μm,相机全视场平均传函(MTF)优于表4中所示的指标要求。由结果可以看振动试验前后,相机视主点及视主距变化量均在测试误差范围内,相机传函测试结果稳定且满足了设计指标。
多光谱相机主体热真空试验中,为了验证相机对卫星温度环境的适应能力安排了相机安装底板与相机间的温度拉偏测试,试验过程相机温度为20℃,底板从10℃~30℃范围进行温度拉偏,分别测试了不同温度点的相机B2谱段的传函值,结果显示相机B2谱段的传函变化范围在0.37~0.39,满足设计要求,且基本无变化,
通过以上测试和试验结果可以看出,多种稳定性结构设计有效地保证了多光谱相机在轨复杂温度环境下的良好成像能力和性能稳定性。
6 结束语
本文从影响相机稳定性设计的几个关键技术着手,介绍了反射镜的消应力支撑设计、主体结构的高力学性能设计和装星热卸载设计,最后对整台相机进行了分析及试验。试验结果表明,通过以上多种稳定性设计技术的采用,保证了多光谱相机有良好的力学和热稳定性,从而确保相机在轨的成像品质和较高的几何定位精度。
(References)
[1] Bugene K T.Tolerance and Techniques in High Precision Optical Assembly[J].Appl Opt,1982,3:113-118.
[2] 卢威,傅丹鹰,陶家生.基于有限元法的离轴TMA结构选型分析[J].航天返回与遥感,2007,28(2):34-38.LU Wei,FU Danying,TAO Jiasheng.Structural Configuration Analysis of Off-axis TMA Based on Finite Element Method[J].Spacecraft Recovery&Remote Sensing,2007,28(2):34-38.(in Chinese)
[3] John G H,Hayes P,Crooke J,et al.High-stability,Cryogenic-compatable Beamsplitter Mounts for the Composite Infrared Spectrometer (CIRS)for the Cassini to Saturn[R].NASA Goddard Space Flight Center,Optics Branch Code 717 Greenbelt,MD 20771.
[4] 曾勇强,傅丹鹰,孙纪文,等.空间遥感器大口径反射镜支撑结构型式概述[J].航天返回与遥感,2006,27(2):18-27.ZENG Yongqiang,FU Danying,SUN Jiwen,et al.Summary of Support Structure Patterns of Large Mirror for Space Remote Sensor[J].Spacecraft Recovery&Remote Sensing,2006,27(2):18-27.(in Chinese)
[5] 邵登云.基于热-结构耦合的光学系统热影响分析[D].西安电子科技大学,机械设计及理论专业,2010.SHAO Dengyun.The Analysis of Thermal Impact for Optical System Based on Thermal-structure Coupled Theory[D].Xi’an University of Electronic Science and Technology,Mechanical Design and Theory,2010.(in Chinese)
[6] 顾元宪,陈飚松,张洪武.结构热振动的耦合优化设计[C].固体力学会议论文集,2002.GU Yuanxian,CHEN Biaosong,ZHANG Hongwu.Structural Design for Coupled Thermal-vibration Optimization[C].Solid Mechanics Conference Proceedings.2002.(in Chinese)
[7] 程乐锦,薛明德,唐羽烨,等.大型空间结构的热-结构动力学分析[J].应用力学学报,2004,21(2):1-10.CHENG Lejin,XUE Mingde,TANG Yuye,et al.Thermal-Dynamic Analysis of Large Scale Space Structures by FEM[J].Chinese Journal of Applied Mechanics,2004,21(2):1-10.(in Chinese)
[8] 杨怿,张伟,陈时锦,等.光机热集成分析中数据转换接口的研究[J].宇航学报,2005,26(2):83-87.YANG Yi,ZHANG Wei,CHEN Shijin,et al.Study on Data Transmission Tool for Thermal/Structural/Optical Integrated Analysis[J].Journal of Astronautics,2005,26(2):83-87.(in Chinese)
[9] 吴鹰飞,周兆英.柔性铰链的设计计算[J].工程力学,2002,12(6):136-140.WU Yingfei,ZHOU Zhaoying.Design and Analysis of Flexure Hinges[J].Engineering Mechanics,2002,12(6):136-140.(in Chinese)
[10] 于靖军,裴旭,毕树生,等.柔性铰链机构设计方法的研究进展[J].机械工程学报,2010,46(13)∶2-13.YU Jingjun,PEI Xu,BI Shusheng,et al.State-of-the-arts of Design Method for Flexure Mechanisms[J].Joural of Mechanical Engineering,2010,46(13)∶2-13.(in Chinese)
