FMS控制系统的设计与研究*
2012-02-05赖思琦
赖思琦,黄 恒
(西南科技大学a.工程技术中心;b.制造科学与工程学院,四川绵阳 621010)
FMS控制系统的设计与研究*
赖思琦a,黄 恒b
(西南科技大学a.工程技术中心;b.制造科学与工程学院,四川绵阳 621010)
针对中小型企业对柔性制造系统(FMS)的小型化、易管理、经济可靠的要求。介绍了一个柔性制造系统的总体方案、工作流程,并重点对控制系统进行了阐述,通过ProfiBus-DP总线通讯采集各分站信息,并协调各个分站动作,使各加工单元与物流系统联成一个有机整体,实现人机交互界面接受用户实时集中控制和操作。
柔性制造系统;总体方案;控制系统;ProfiBus-DP
0 引言
目前,柔性制造系统(FMS)已渗透到制造业的各个领域,并对生产方式产生了深远的影响,越来越多的制造企业在传统的单品种、大批量生产方式向多品种、中小批量及“变种变量”的生产方式过渡这一过程中使用了FMS。目前中国的加工制造企业,特别是中小型企业对柔性制造系统的要求为稳定可靠、简易灵活、性能价格比高。
ProfiBus-DP总线具有速度快、成本低,适用于控制系统与分散外部设备之间通信的特点,既可实现对整个FMS系统的集中控制,又能分别控制各个外部单元。
因此,基于ProfiBus-DP现场总线,设计工作稳定可靠、具有较高性能价格比的柔性制造系统,既可满足市场需要,又为高校实践教学和科研活动提供一个开放的平台。
1 柔性制造系统的总体组成和工作流程
1.1 系统总体组成
所设计的柔性制造系统由自动化立体仓库单元、AGV运载机器人、自动输送线装置、CCD形状检测系统、六自由度行走搬运机器人、六自由度焊接机器人、数控车床、加工中心及相应附属设备组成,其中焊接机器人、济南机床厂的CK6136i数控车床、杭州友佳公司的QM22加工中心为生产单元。系统运用Profibus-DP总线及开发型组态软件等网络通讯技术,使主控制台对各单元设备进行集成控制,能够根据生产任务的变化,通过简单地改变软件设置的方法进行调整,以适宜于多品种、中小批量生产。系统空间尺寸为16米×10米×3.5米,其结构如图1所示[4]。

图1 系统结构图
1.2 系统工作流程
系统开始工作前,人工将不同工件和托盘按照事先规划好的各零件毛坯区域送入原料库。
工件或毛坯由码垛机从自动化立体仓库的原料仓库中取出,此时AGV按照预定轨道运行到取料位置。通过出库平移台,毛坯由AGV送至自动输送线,经六自由度搬运机器人送到柔性制造加工单元中,按照工序流程在数控车或加工中心、焊接机械臂上进行加工。加工完成后,由机器人取出工件,通过输送线和AGV一起运行,将工件放回入库平移台上,由码垛机拾取送入仓库成品库。同时,软件记录信息,以便管理,进而完成一个工作流程,其流程图如图2所示。

图2 系统工作流程图
2 控制系统设计
控制系统由1台研华IPC-610H工控机作为主控机、2台运动控制器、两台研华IPC-6606工控机、3台三菱PLC、1套无线数据传输系统组成,通过Profi-Bus-DP总线同主控计算机做数据交换,其组网结构如图3 所示[5]。

图3 系统组网图
控制系统包括主控单元和各分站控制单元,其中主控单元由主控计算机和控制软件组成,通过ProfiBus-DP总线通讯采集各分站信息,并协调各个分站动作,同时实现人机交互界面接受用户控制和操作,主要功能包括:
(1)仓库状态监视:系统提供可视化界面,操作员对各个仓库的物料储存状态可以实时进行监控。
(2)物料自动分拣:系统依据尺寸,自动对物料进行区分,并分别进行处理。
(3)手动控制:系统提供可视化界面,操作员可将系统分为传送带装置的运动、AGV单元、立体仓库、六自由度搬运机器人等若干个作业完成。
(4)连续控制:系统提供可视化界面,模块内部负责实现工作流逻辑配置与时序控制,操作员在系统连续工作期间可以实时观察到各个作业节点的工作状况。
(5)制造执行:通过预定义的工艺路线,系统自动执行各个单元,并协调调度已达到合适工作节拍,对于基于接口的可控单元无需人工干涉。
(6)系统状态:系统提供可视化界面,操作员可以实时监控各个设备的工作状态。其中包括各个装置是否正在运行,各个装置是否已经通电,物流系统中正在分拣的各个物料的所在位置。
(7)系统管理:分为数据备份恢复、操作日志、系统操作人员权限设定、仓储管理等。
主控软件为操作人员使用的前台程序,软件运行平台为Windows XP,使用组态王软件开发,模块内部负责实现工作流逻辑配置与时序控制,操作员在此可以操作系统的初始化、运行、停止工作,并开始整个柔性制造系统的连续工作,同时可以实时观察到各个作业节点的工作状况及工件信息。系统整体通过Profibus总线和无线通讯控制协调各个单元运动,物流仓储管理系统部分采用北京精诚科技“条码化仓储物流综合管理系统”,主控系统通过局域网,基于TCP/IP协议,与物流仓储管理系统部分进行连接交互。各个单元均同时提供Profibus总线协议解释以及连续控制部分和用户GUI界面手动控制部分。
其中,系统连续控制的部分代码如下,其界面如图4所示。

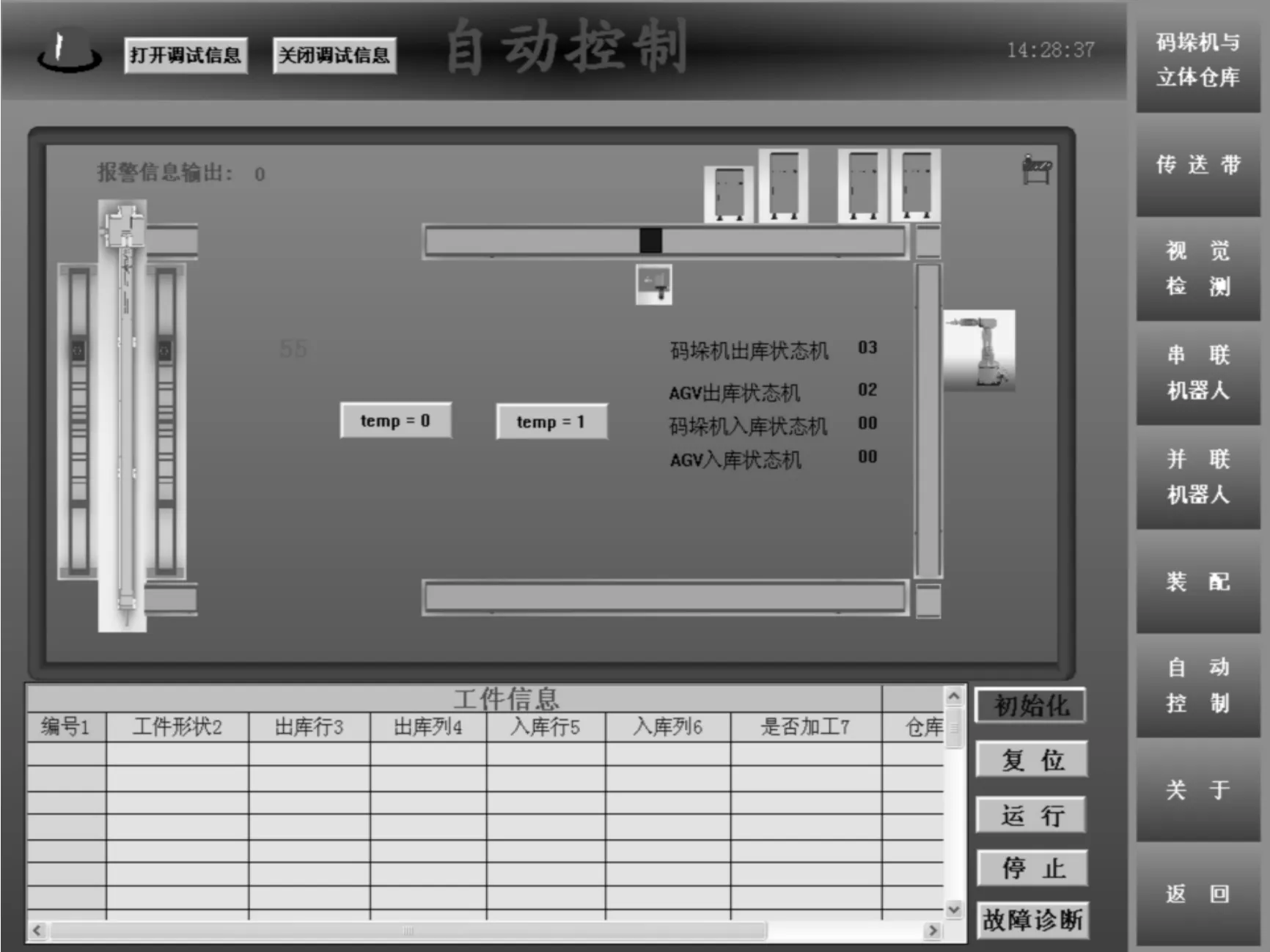
图4 系统连续控制界面

3 结束语
主控计算机通过ProfiBus-DP工业现场总线采集信息,协调动作,将自动化立体仓库、自动化输送线、搬运机器人、焊接机器人以及数控车床和加工中心等分单元完全纳入整合为一套管理方便灵活、工作可靠的柔性制造系统,实现了从毛坯出库、运送、加工、工件返回到入库的全过程。系统运行状态良好,在我中心生产车间的工作得到了很好的应用和发展。
[1]王勇.基于PLC与PROFIBUS的柔性制造生产线控制系统的设计与实现[D].苏州:苏州大学,2009.
[2]王程.基于现场总线的FMS控制系统研究[D].合肥:合肥工业大学,2009.
[3]马超.基于Profibus现场总线的柔性制造系统的研究与实现[D].合肥:合肥工业大学,2010.
[4]王锋,王品,李家霁.基于IO接口的柔性制造系统及其实现[J].组合机床与自动化加工技术,2009(12):78-81.
[5]潘锋.基于Profibus的柔性制造教学实训系统的设计与实现[J].制造业自动化,2010(10):88-91.
(编辑 赵蓉)
The Design and Research of the FMSControl System
LAISi-qia,HUANG Hengb
(a.The Center of Engineering and Technology;b.School of Manufacturing Science and Engineering,Southwest University of Science and Technology,Mianyang Sichuan 621010,China)
It introduced a general scheme of flexiblemanufacturing systems(FMS)and work processes,and described the control system for them iniaturization,easymanaging and the reliable and economic requirements of the FMS in the small and medium enterprises.The ProfiBus-DP bus communicates collects sub-station information and coordinates the sub-stationmoving,which combines processing unitsw ith logistics systems to form an organic entirety in order to achieve Man-machine interface and accept real-time control and operation.
flexiblemanufacturing systems;the overall scheme;control system;ProfiBus-DP
TH165
B
1001-2265(2012)06-0075-04
2011-11-21
四川省教育厅2011年重点科研项目(11ZA129)
赖思琦(1976—),男,四川绵阳人,西南科技大学工程技术中心教师,讲师,工学硕士,主要从事机电控制、数控技术、柔性制造方面的教学和研究工作,(E-mail)lai_siqi@163.com。