蓝牙程控微电极拉制仪的研制
2012-02-03刘向明李享元
刘向明,王 威,李享元
(1中南民族大学生物医学工程学院,武汉430074;2中南民族大学电子信息工程学院,武汉430074)
在基础医学、神经生物学动物实验中,玻璃微电极[1-3]技术已得到了广泛的应用.实验人员利用微电极的毛细管和高阻抗特性,借助组织学定位的方法,用微电极技术作引导,记录中枢神经细胞或其它组织细胞内或外的自发及诱发的单位生物电信号的变化.在细胞水平研究不同药物、递质以及各种诱发刺激对细胞功能的影响,揭示机体活动的机理.1991年,德国科学家Erwin Neher和Bert Sakmann凭借在基于微电极技术的膜片钳细胞离子通道实验研究中的突出贡献,联合获得了诺贝尔生物和医学奖[4,5].玻璃微电极是膜片钳系统通过探头直接与细胞膜形成高阻抗封接的部件,其性能的好坏对实验的成功与否起决定性作用,因此一台操作简单,功能可靠的电极拉制仪对于实验的重要性不言而喻.
拉制仪从拉制方式分有两种:一种为垂直式的拉制仪,利用金属丝(钨丝或铂丝)通过大电流将玻璃毛坯管加热到熔点,利用重力拉断;另一种是水平拉制仪,利用弹力、电动力或气压作单次或多次拉制,多采用微处理器控制.
垂直型拉制仪有德国HEKA公司生产的PIP5和PIP6系列,而美国Sutter公司生产P-97和P-1000系列的水平拉制仪.国内研发拉制仪的厂商很少,而且功能简单,操作复杂,产品需求几乎全部依赖于进口.进口的拉制仪价格昂贵,操作复杂,参数设置繁琐,并且加热丝等零部件不好修理和更换[6,7].针对这些缺点,在神经药理实验室电极使用经验的引导下,我们以Sutter公司P-97水平拉制仪为参考,从机械结构和软件控制上进行了彻底的改进,使得仪器在工作中能够以恒定功率加热,并可根据环境温度的变化自动小范围调整加热功率.该仪器制作的电极尖端外形缩径比大,电极的串接电阻小,记录的信号真实可靠,便于在电生理实验中使用.
1 拉制仪机械结构和硬件控制系统的设计
1.1 水平拉制仪机械结构设计
拉制仪机械结构如图1所示:4和5为左右玻璃毛坯管夹持器,分别与水平拉制滑块1和2固定在一起,它们在V型下拉滑块6的重力作用下实现在水平直线导轨3上分别向左向右两个方向做等距
1.2.1 单片机系统
系统采用新华龙公司的C8051F041单片机作为核心控制器.其自带12位逐次逼近型AD可编程实现9通道模拟输入,可以很好地完成系统中各个模拟量的测量工作;自带两个片内12位电压型DA实现自动反馈控制模块中PID电路的参数设置,即加热功率设置;自带两个串口(UART0和UART1),UART0用于控制BlueCore4-External蓝牙模块(简称BC4模块)通过USB蓝牙适配器与PC实现数据通信,UART1用于串口液晶屏数据显示;丰富的数字I/O口、定时器、Flash存储器、通信总线等片内资源可以很好的完成整个系统的控制、参数掉电存储等功能[8].
1.2.2 加热控制电路
单片机 DA偏置电路、模拟 PID调节器、V/PWM转换电路、模拟乘法器电路和用于调节加热电流的MOS管电路等构成闭环反馈控制系统,如图3所示.采用恒功率加热模式,以最大功率的百分比表示,经过准确的测试和计算得出系统最大加热功率Pmax=40.13W.
1.2.3 功能模块电路
1)位移检测和电磁铁控制电路.在拉制仪前期测试中发现玻璃管第一步拉制长度对于电极的外形、端口外径及阻抗大小有很大的影响,因此对拉制离、等线速度和等拉制力的相对运动,这样保证了拉制出来的玻璃电极是对称的.

图1 拉制仪的机械结构图Fig.1 Mechanical structure scheme of themicropipette puller
1.2 拉制仪硬件控制系统设计
拉制仪的硬件控制部分主要包括加热控制电路、单片机系统和PC人机交互软件界面三大部分.单片机系统通过一些功能模块实现对加热电路的控制,PC与单片机之间通过蓝牙实现数据无线传输.系统整体框图如图2所示.长度的控制非常重要.系统采用深圳米朗科技公司生产的KTM微型拉杆系列50mm的位移传感器和上海睿恒电子公司的RH-001-28多臂电磁铁实现这一功能:利用单片机12位AD对拉制位移进行精确测量,再配合电磁铁电路实现对第一步拉制长度的精确控制,精度达到了0.01mm,同时实现拉制仪的二步加热模式.
2)环境温度补偿电路.系统采用Dallas公司的DS18B20 数字温度传感器[9,10]对环境温度进行测量,实现加热功率的补偿.这个功率很小,一般不会超过1%,因为实验室的气温波动范围不大,则加热功率补偿也不应过大.
3)LCD屏显示电路.系统采用一款HB240128M 240×128串口液晶屏:单片机UART1的TX1、RX1引脚分别与LCD的RX、TX相连,通信波特率采用LCD默认的9600,发送必要的设置指令后再发送需要显示的拉制参数和工作状态即可.整个显示模块只需四根线(外加3.3V电源线和地线),避免了繁杂的并口线给装机过程带来麻烦,又使得整个拉制过程非常直观地显示在实验员面前.
1.3 蓝牙从设备硬件设计
本系统使用CSR公司的BlueCore4-External模块作为蓝牙从设备.该模块工作频带为2.4~2.48GHz,包含无线电收发器、基带控制器以及蓝牙主控制器接口协议HCI,支持USB、UART、PCM语音接口和SPI接口等多种通信接口,片上有32kB的RAM和8MB的外部FLASH,集成度高、功耗小,是高质量的CLASS2蓝牙模块[11-13].
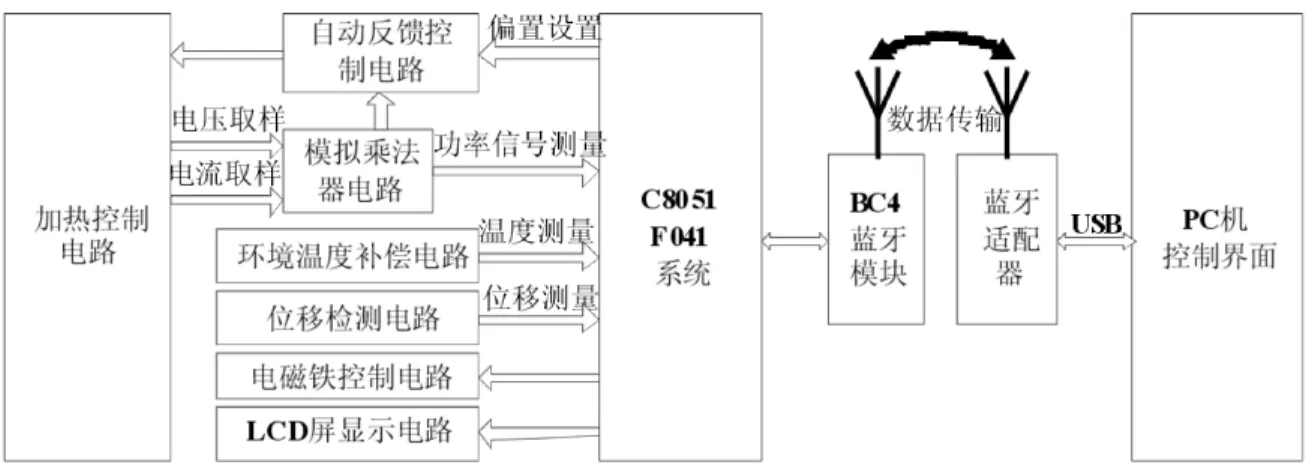
图2 硬件设计整体框图Fig.2 Hardware design diagram
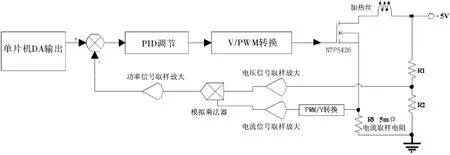
图3 加热系统原理图Fig.3 Heating system principle diagram
蓝牙模块将控制板采集到的数据按照蓝牙协议转换成相应的编码发送到PC,由于BC4模块提供标准 UART接口,因此它可以直接与单片机C8051F041的UART0口连接通信,其硬件电路如图4所示.
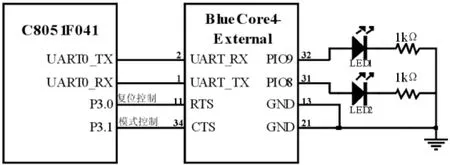
图4 蓝牙从设备硬件电路图Fig.4 Hardware circuit of the Bluetooth slave
BC4蓝牙模块模式控制引脚(PIO11)与单片机的一个数字I/O口直接相连,该引脚为高电平时,蓝牙模块为AT命令响应工作状态,单片机通过UART0给模块发送特定的AT指令以设置模块的工作模式(从模式)、设备名称、通信波特率等,设置完毕,蓝牙模块复位,将该引脚置低,蓝牙模块的初始化完成.
当蓝牙开始工作,LED2闪烁,此时PC机上的蓝牙主设备正在搜寻蓝牙从设备,配对成功后,LED1长亮,LED2的闪烁间隔改变,到这时系统就开始数据传输了.
2 基于LabVIEW的人机界面的设计
LabVIEW程序被称为VI(虚拟仪器).它采用数据流编程方式,程序框图中节点之间的数据流向决定了程序的执行顺序,用图标表示函数,用连线表示数据流向;LabVIEW提供很多外观与传统仪器(如示波器、万用表)类似的控件,可用来方便的创建用户界面;同时它还提供了大量的工具与函数用于数据采集、分析、显示和存储等[14,15].
本系统VI的主要功能是实现PC通过蓝牙与单片机控制板的数据交换.软件打开仪器上电后,蓝牙开始配对,当配对成功后就有数据显示在界面上,初始数据显示了拉制仪当前的工作参数和状态,此时可以设置拉制参数,设定完毕后可将当前参数保存到一个文件中,下次拉制时载入即可,点击启动按钮拉制仪开始工作,直至拉制完成,在此过程中不需要人为参与,取下电极后将拉制仪左右滑块恢复到初始位后又可以进行下一次拉制.应用软件前面板如图5所示.

图5 工作过程中的LabVIEW显示界面Fig.5 LabVIEW display interface in working
3 拉制仪最优参数配置与电极性能分析
3.1 拉制仪工作描述
拉制仪制作膜片钳电极时有两种启动方法:一种是利用拉制仪金属外壳上的启动按键启动;另一种是采用LabVIEW软件界面启动.
1)按键启动.系统先上电,将左右拉制滑块拨到初始位置,电磁铁就会通电闭合,将滑块牢牢吸住,使其不再可以左右滑动.此时完成拉制玻璃管的固定工作,接着按下启动按键,电磁铁断电,释放滑块,第一步拉制工作就开始了,从此时开始直到拉制工作结束(中间包括冷却计时和第二步加热拉制)全部由系统自动完成,不再需要实验员手动参与.拉制参数采用最近一次电极拉制的参数设置,可以从拉制仪面板上的LCD显示屏上看出.按键启动方式适合于拉制参数已经确定,需要较多电极的重复拉制操作,这种方式不需要PC的参与,但是不能更改参数.
2)LabVIEW软件启动.系统上电后先进行蓝牙配对,配对成功后将拉制滑块拨到初始位置,电磁铁自动通电闭合,牢牢吸住滑块.接着固定拉制玻璃管后,通过PC上的LabVIEW显示界面(如图5所示)设置拉制参数,包括第一步加热功率、玻璃管拉制长度、第二步加热功率和第一步和第二步之间的冷却延时时间四个参数.设置完毕后点击启动按钮,此时PC机将设置的参数通过蓝牙发送给单片机,单片机收到正确的数据后先将其写入片内Flash存储器,保存起来,掉电后也不会丢失.然后将最新拉制参数、当前工作状态和实验室环境温度显示到LCD液晶屏上.接着电磁铁断开,系统按照设置的参数开始第一步拉制工作.单片机启动滑块的位移测量,当位移达到设定值时,电磁铁闭合,加热暂停,冷却计时开始,冷却完毕后断开电磁铁,自动进行第二步拉制,直至拉制工作完成,加热停止,取下电极后将滑块移动到初始位置即可开始下一次的拉制工作,重复上面的步骤.或者接着利用按键启动可以拉制出性能一样的电极,操作步骤与第一种按键启动方法相同.
3.2 尖端外形和电极阻抗分析
经过多次实验,发现设置的4个参数对电极尖端外径与阻抗大小都有一定的影响,但是起决定作用的参数为拉制长度和第二步加热功率:第一步将玻璃管拉制到设定长度,长度一定时,加热功率在一定范围内(不能过高和过低)的变化对玻璃管的外形影响不大.在Nikon ECLIPSE 90i显微镜下放大20倍后,利用其自带的 PC机软件 NIS-Elements BR3.1拍得的照片如图 6所示,当设定长度为2.45mm时,50%和60%的第一步加热功率对玻璃管中间的最小外径影响不大,两者相差不到0.1μm.第一步拉制结束后开始冷却计时,时间有点长,目前设置为10 s,以便让加热丝充分冷却,当这个延时测试到最佳效果后不做改变.因此第一步加热功率和冷却延时时间对电极尖端形状和电极阻抗影响不大.
第一步加热功率为50%时拉制的玻璃管中间最小外径为265.20μm,而为60%时拉制的玻璃管中间最小外径为 265.12μm,两个仅仅相差0.08μm.
1)决定电极端口外径和阻抗大小的第一个参数是第二步加热功率.表1给出了第一步拉制长度为2.32mm时,利用不同功率进行第二步加热拉制出来的电极端口外径和阻抗大小的测试结果,图7为电极端口外径和电极阻抗与第二步加热功率的关系及变化曲线图.其中电极端口外径数据是电极尖端在Nikon ECLIPSE 90i显微镜放大400倍后利用其自带的PC软件NIS-Elements BR3.1所带的长度测量工具经过测量得到,阻抗值是在电极灌注了膜片钳实验所用的标准细胞内液,在HEKA膜片钳放大器工作环境下测试所得到的数据,测试结果显示,在2.32mm的拉制长度下,第二步加热功率小于29%时,电极断裂,阻抗很小.

图6 第一步50%和60%功率拉制的玻璃管外形对比图Fig.6 Glass pipe shape contrasted between 50%and 60%step one heating power
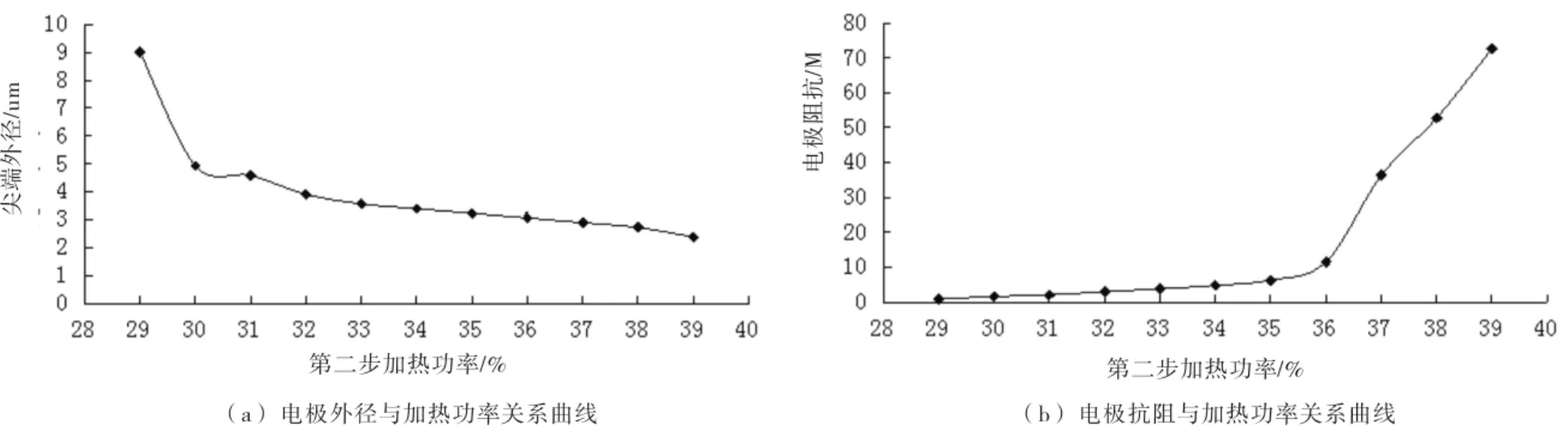
图7 拉制长度2.32mm时电极尖端外径和阻抗大小与第二步加热功率关系曲线图Fig.7 Diagram of electrode tip external diameter and impedance applyed to step two heating powerwhen the drawning length is2.32mm

表1 拉制长度为2.32mm电极测试结果Tab.1 Electrode test resultswhen the drawning length is2.32mm
如表1所述,当第一步拉制长度设置为2.32mm时,第二步加热功率分别为29%、31%、35%和38%时拉制的电极尖端外径分别为 9.01μm、4.59μm、3.23μm和2.72μm,它们在日本 Nikon 公司生产的Nikon ECLIPSE 90i显微镜放大400倍后拍得的图片如图8所示.可见第二步加热功率对拉制的电极性能影响很大.
2)决定电极端口外径和阻抗大小的另一个参数是第一步拉制长度.在其他参数都相同的情况下,不同的拉制长度制作而成电极尖端外径与阻抗大小相差很大,例如第二步加热功率设置为33%时,第一步加热长度分别为2.32mm、2.45mm 和2.62mm时拉制的电极端口外径分别为 3.57μm、4.08μm 和5.95μm,其对比图如图9所示.
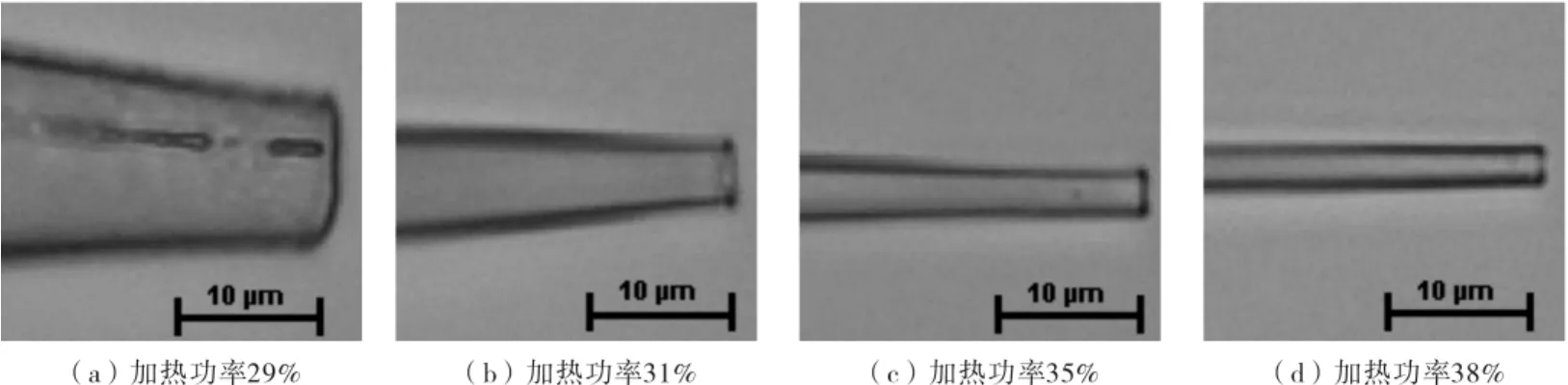
图8 不同第二步加热功率拉制电极尖端外形对比图Fig.8 Pictures of electrode tip contrasted in different step two heating power
3.3 拉制仪最优参数配置
根据大量电极端口外径和阻抗大小测试实验得出本系统拉制膜片钳实验电极的最佳参数为:第一步加热功率:50%,拉制长度:2.45mm,冷却延时:10s,第二步加热功率:36%.拉制而成的两根电极尖端外径为3.57μm,电极阻抗在3.6MΩ 左右,达到膜片钳实验要求.其尖端外形如图10所示.
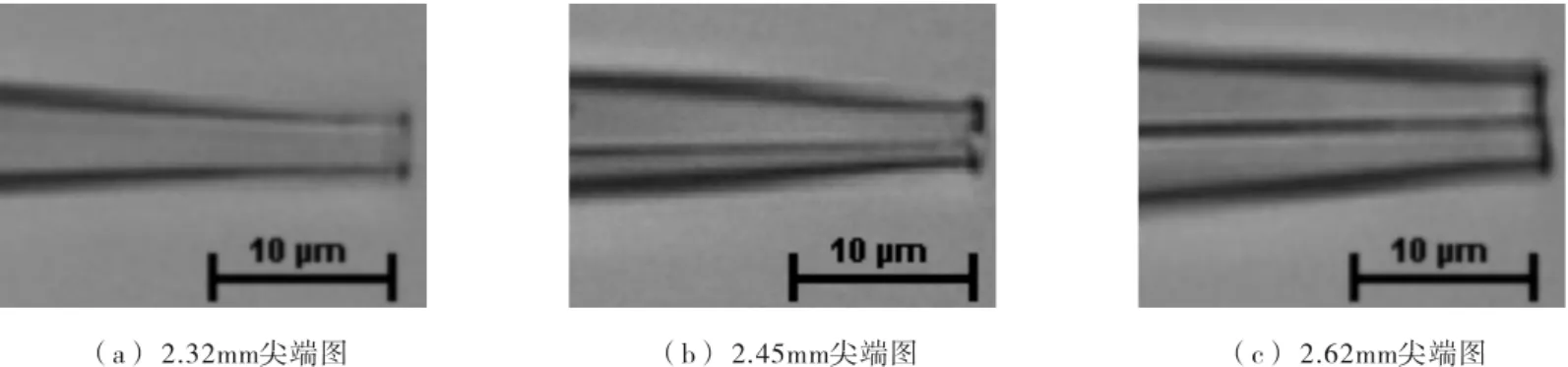
图9 不同拉制长度的电极尖端对比图Fig.9 Pictures of electrode tip contrasted in different drawning length

图10 一次拉制出两根对称电极Fig.10 Two symmetrical electrode aremade each drawning work
4 结语
本系统在拉制膜片钳实验电极的过程中有如下经验:①第一步将玻璃管拉长,加热功率应该偏高一点,玻璃管软化后能够迅速向两边拉伸.经过大量实验测试,50%比较合适.同时拉制长度设置也应适中,目前2.45mm是比较合适的参数.②第二步拉制时,在其他拉制参数一致时,加热功率应适中.若加热功率过低,拉制出来的电极口端较粗,尖端外径偏大,甚至断裂,电极内阻偏小,不适合实验使用,再或者出现拉不断现象导致拉制失败;若加热功率过高,电极口端较细,尖端外径过小,电极内阻过大,甚至出现口端弯曲或成丝状,不适合实验使用[16].由于加热功率、拉制长度、冷却时间、玻璃毛坯管的粗细程度都对电极的形状和内阻有影响,所以拉制时必须根据实验要求,设置合理的参数,试拉几次,待符合要求后软件保存当前拉制参数,掉电后硬件系统会保存当前参数,下次拉制时不需要重新设置就可以拉制出一样的电极.实验结果表明,我们研制的微电极拉制仪,在武汉大学医学院和中南民族大学神经药理实验室的使用效果来看,达到了膜片钳实验的要求,而且使用方便,价格便宜,可以替代昂贵进口的同类仪器.
[1]周洪波,李 刚,金庆辉,等.神经工程系统中的微电极技术[J].微纳电子技术,2006(11):535-540.
[2]周小红,施汉昌,蔡 强.基于微电极的生物膜分析技术的研究进展[J].环境监测管理与技术,2006,18(1):32-35.
[3]宋毅军,田 心.微电极技术与脑运动性信息传导的研究[J].国外医学生物医学工程分册,2002,25(6):245-249.
[4]Neher E,Sakmann B,Steinbach JH.The extracellular patch clamp:a method for resolving currents through individual open channels in biological membranes[J].Pflügers Archiv,1978,375(2):219-228.
[5]Neher E,Sakmann B.The patch clamp technique[J].Scientific American,1992,266(3):44-51.
[6]徐跃平,杨金友,刘振伟,等.P-97微电极拉制仪加热片不加热的原因分析[J].医疗卫生装备,2011,32(6):99-100.
[7]范振中,易小林.PB-7型微电极拉制器的改进与维修[J].现代医学仪器与应用,2003,15(2):34-35.
[8]童长飞.C8051F系列单片机开发与C语言编程[M].北京:北京航空航天大学出版社,2005.
[9]张 军,陈慧丽.基于MSP430单片机和DS18B20的数字温度计[J].电子设计工程,2010,18(11):106-109.
[10]陈生翰,刘其洪,丁 柱.单总线数字温度传感器DS18B20自动识别的设计与实现[J].仪表技术与传感器,2010,5:16-18.
[11]钱志鸿,杨 帆.蓝牙技术原理、开发与应用[M].北京:北京航空航天大学出版社,2006.
[12]彭东鸣,侯义斌,黄樟钦.BlueCore4-External芯片对蓝牙模块性能的影响[J].现代电子技术,2005,21:30-32.
[13]杨 勇,杨润生,刘 品.基于 DSP与FPGA的蓝牙数据采集系统设计[J].计算机技术与应用,2010,36(8):150-152.
[14]周润景,郝晓霞.Multisim&LabVIEW虚拟仪器设计技术[M].北京:北京航空航天大学出版社,2008.
[15]黄豪彩,杨灿军,陈道华,等.基于LabVIEW的深海气密采水器测控系统[J].仪器仪表学报,2011,32(1):40-45.
[16]王士端,胡宏镇,沈 杰.二步式玻璃微电极拉制仪的研制[J].同济医科大学学报,1996,25(6):480-481.
