一种磁悬浮永磁直线电动机的电磁力特性
2012-01-25蓝益鹏张武张凤阁
蓝益鹏,张武,张凤阁
(沈阳工业大学 特种电机与高压电器教育部与辽宁省共建重点实验室,辽宁 沈阳110870)
0 引言
摩擦阻力是制约直线电机数控机床性能和加工精度的重要因素之一,将磁悬浮技术应用于直线驱动系统研制新一代高精高速数控机床有着重要意义[1-3]。目前主要采用电磁铁实现直线电机磁悬浮来消除摩擦[4-6],其缺点是需要多点支撑悬浮,装置复杂。针对以上问题,本文提出一种新型磁悬浮永磁直线电动机,该电动机的动子上有两套绕组,一套绕组用于产生电磁推力,另一套绕组用于产生磁悬浮力。它不需要电磁铁悬浮系统,是靠永磁直线电动机自身产生的磁悬浮力来运行,既能够实现零传动快速进给,又能够解决困扰高精高速数控机床消除摩擦问题的技术难点。即不增加实现悬浮的功耗,同时降低了装置的复杂性,克服了传统磁悬浮技术的一些不足。
齿槽定位力是引起电机推力波动的主要因素之一[7-10],使电机不能平稳运行,影响电机的性能,同时使电机产生振动和噪声[10-13]。有关永磁电机齿槽转矩计算方法和削弱方法的研究,文献[7-9]研究了电枢齿的形状、极数和槽数配合对齿槽转矩的影响;用磁极不对称、开辅助槽、不同槽口宽度配合等方法减小齿槽转矩。文献[11]采用非线性二维有限元法计算转子偏心及定子斜槽的凸极同步发电机的空载支路电压。文献[12]利用斜极的方法削弱盘式永磁电机的齿槽转矩,采用多层分片法建立电机的二维有限元模型,研究整体磁极斜极与分段磁极斜极对齿槽转矩的不同影响。对于采用斜极削弱磁悬浮永磁直线同步电动机齿槽效应的研究,目前尚未见诸多文献,特别是采用斜极方式之后对于悬浮力的影响是值得研究的。
目前对于斜极或者斜槽结构电动机的电磁场分析,仍然局限于二维有限元分析。虽然减少了工作量但是也影响的结果的准确性。本文对磁悬浮永磁直线电动机采用斜极的方式来减少由齿槽定位力电机的推力波动。从描述磁介质的分子环流假设出发,用毕奥-萨伐尔定理导出了其外部空间磁场分布的解析表达式。进一步基于由磁荷法和虚位移法给出的永磁体磁力数值积分公式,推导出电机悬浮力波动的解析模型,说明斜极对悬浮力的影响。通过对电机进行瞬态三维有限元建模分析推力及悬浮力的变化情况。
1 电动机的结构与原理
图1为该种磁悬浮永磁直线同步电动机示意图。电动机次级定子上附有N、S极相互交替的永磁体,初级动子由铁心及其两套绕组构成,两套绕组均为分布式排放,且在电气上相对独立。定子铁心固定在基座下,动子铁心与进给平台固定相连,运行时沿着定子铁心移动,在定子铁心上还设置有辅助导轨,动子在使用的时候就是沿着辅助导轨移动,当磁悬浮永磁直线同步电动不工作时,停在辅助导轨上。
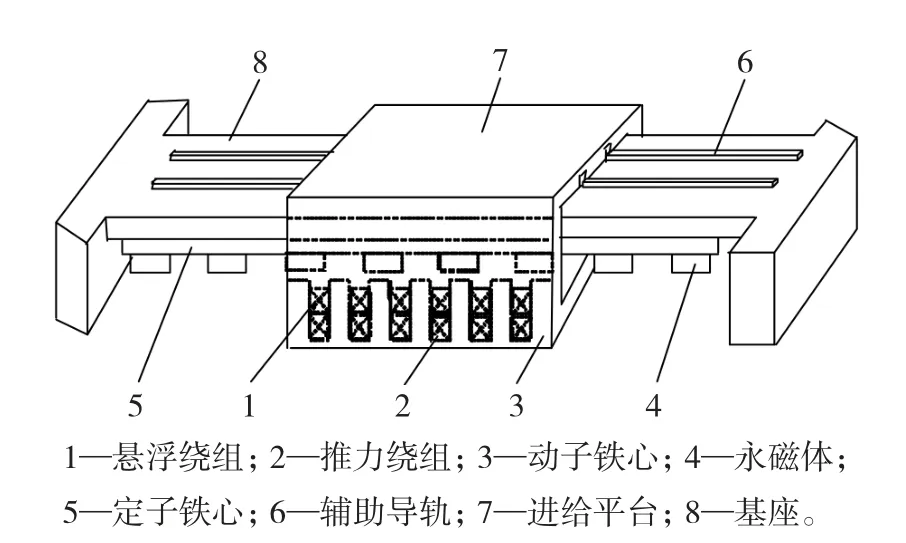
图1 磁悬浮永磁直线同步电动机结构Fig.1 The structure of magnetic suspension motor
该磁悬浮永磁直线电动机在动子槽内有两套绕组,分别为推力绕组以及悬浮绕组。与目前主要采用的电磁铁或者电磁和永磁混合励磁的直线电机磁悬浮技术相比,该种磁悬浮永磁直线电动机不需要电磁铁悬浮系统,即不增加实现悬浮的功耗,而且不需要多点支撑悬浮,降低了装置的复杂性。在电动机中通入三相电流后会在气隙中产生在直线方向呈正弦分布的行波磁场。对推力绕组电流采用id=0的控制方式,与在定子铁心上的永磁体的励磁磁场相互作用产生电磁推力从而实现动子铁心带动进给平台的运动。悬浮绕组的电流采用iq=0的控制方式,通过改变悬浮绕组电流的大小实现増磁和去磁作用从而对气隙磁场进行调节,改变磁拉力的大小。悬浮绕组电流的増磁或去磁作用由悬浮高度决定,在磁悬浮力作用下动子实现可控悬浮。在这里利用矢量控制策略令推力绕组id=0,对iq进行控制,产生可控推力;对于悬浮绕组令iq=0,对id进行控制使悬浮绕组产生可控悬浮力。
2 空间磁场分布及磁力的解析表达
图2为矩形永磁体模型。当尺寸为a,l,g的矩形永磁体沿一个方向均匀充分磁化,其磁体内部磁化矢量可视为常量。
由安培分子环流假设知:此时外部空间中任一点的磁场由永磁体内排列整齐的所有分子电流共同激发。由于是均匀磁化,体内分子电流的效应相互抵消,因此永磁体在宏观上表现为只有表面电流而无体电流存在,这样可以认为,外部空间中任一点的磁场仅由永磁体表面闭合电流环路ABCD所激发。设环路内电流密度为 J。用(x0,y0,z0)表示位于永磁体内部的点,由平面 z0与 z0+dz0构成的薄层在其外部空间任一点P(x,y,z)处,由强度为Jdz0的电流环AvBvCvDv产生的磁场为dB,则总磁场为:
式中dBx、dBy和 dBz是薄层电流环 AvBvCvDv在 P(x,y,z)产生磁场分别在 x,y和 z方向的分量。

图2 永磁体模型Fig.2 Model of permanent magnet
由比奥-萨伐尔定律

式中:μ0为真空中的磁导率,r为从源点指向场点P的矢径,于是有
同理,可以分别得到其他三段的 dBx、dBy和dBz。为表述简单,记

式中Ψi是以φ1,φ2,φ3为自变量的一个函数记号,这样


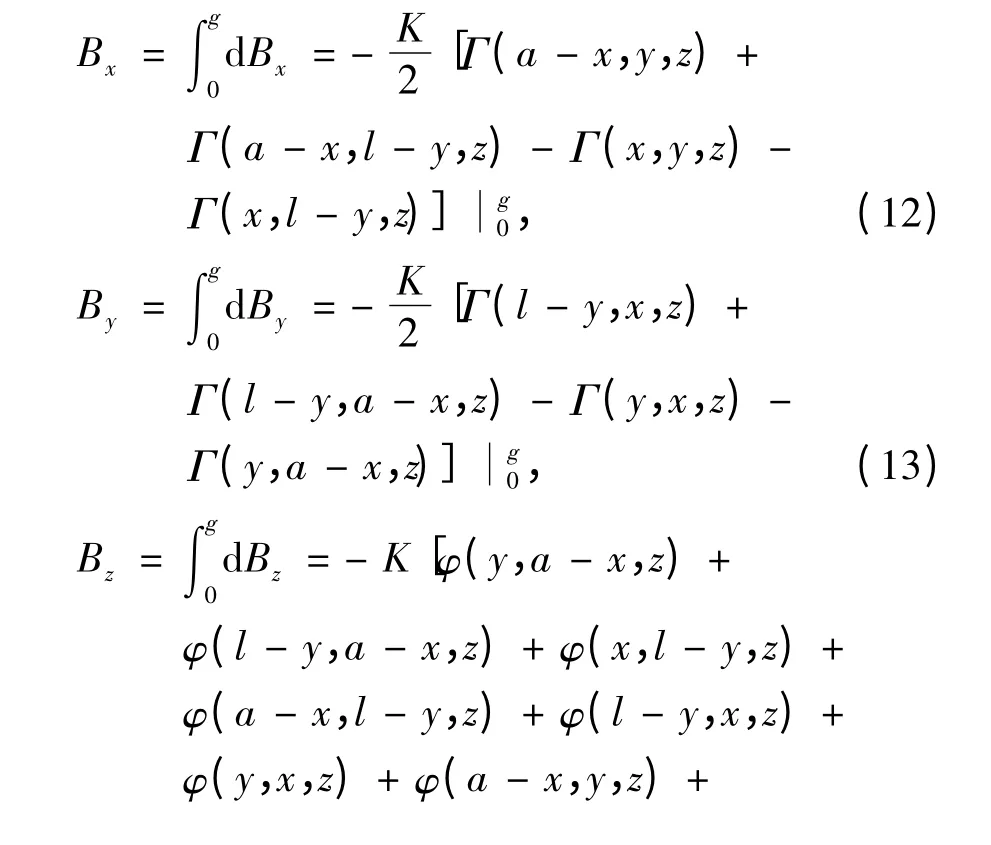
将式(7)~式(9)代入式(1),并引入函数记号有

式中 Γ 是以 γ1,γ2,γ3为自变量的函数记号;φ 是以φ1,φ2,φ3为自变量的一个函数记号。于是永磁体在其外部空间任一点P产生的总磁场为

将动子磁场视为由一矩形磁体产生,图3为永磁体与动子间的参数。
图3 永磁体与动子的参数Fig.3 Parameter of mover and permanent magnet

式中:I1为永磁体磁极化强度矢量其量值等于永磁体剩磁感应强度,I2为电枢等效电流层产生的磁极化强度矢量,I1和I2在y轴方向的分量为0;rPM为同一横截面内两长条形永磁体间的距离;β1和β2分别为I1和I2与x轴正方向的夹角;θ为rPM与x轴正方向的夹角;ds1为永磁体的面积,ds2为动子铁心面积。z向的磁力Fz计算如下:

将式(17)代入式(16)化简积分得

可见悬浮力的波动分别与永磁体剩磁和永磁体纵向平均长度成正比,磁力随永磁体的截面增加而增大,随气隙间距增加而减小。在确定永磁体型号后,不改变气隙高度,永磁体斜极后相对等效截面积变小于是悬浮力的波动也减小。
3 仿真结果及分析
设计了一台6极18槽的磁悬浮永磁直线电动机,建立三维瞬态场有限元模型进行仿真研究。电机主要参数为:极距33 mm,齿距11 mm,槽宽7 mm,槽高35 mm,动子铁心高度45 mm,气隙5 mm,永磁体宽28 mm,永磁体高度3 mm,剩磁密度1.2 T,相对磁导率0.915。
为了减少计算时间取一对极下的情况建立三维有限元模型进行仿真,图4为空载情况下某时刻电机动子磁密云图。
令推力绕组id=0,iq=2.5;悬浮绕组 iq=0,id分别为 0、2、-2 产生的悬浮力分别为 Fy1、Fy2、Fy3,图5为电动机产生的推力和悬浮力的变化情况。可以看出悬浮绕组直轴电流的改变并不对电机推力产生影响。采用该种方式电动机可以产生独立可控的推力和悬浮力,通过控制悬浮绕组直轴电流可实现稳定悬浮。

图4 磁密云图Fig.4 Cloud chart of flux densit

图5 电机的推力与悬浮力Fig.5 The thrust and suspension force of the motor
齿槽定位力可以表示为

式中:NC为槽数Qs和极数2p的最小公倍数;S为定子和永磁体间的机械角度;KSK为斜极因数,即

其中αSK为斜极的角度。可以看出,斜极或者斜槽都能减小齿槽定位力。当定位力的基波和谐波次序是极数和槽数最小公倍数的整数倍时,定位力将减到最小。斜极的最佳角度为

对电机采用斜极一个齿距的方案,对斜极后的电机进行三维瞬态有限元仿真,得到其电磁推力及悬浮力的变化情况。图6是该电动机一对极下气隙磁密所作的谐波分析,可以看出谐波分量主要是三次谐波。图7为斜极前后推力波动的情况,图8为斜极前后电机悬浮力的波动情况。

图6 气隙磁场谐波分析Fig.6 Analysis of harmonic waves of air-gap
图7 电机的推力波动Fig.7 The thrust ripple of the motor

图8 电机的悬浮力波动Fig.8 The suspension force ripple of the motor
可以看出,电机的推力波动最大值减小了67%,悬浮力的波动最大值减小33%。采用斜一个齿距的斜极方案可以减小电机的推力和悬浮力的波动使电机的电磁力得到改善。
4 结论
1)提出了一种用于数控机床的磁悬浮永磁直线同步电动机,其中一套绕组用于产生电磁推力,另一套绕组用于产生磁悬浮力,并且对于推力绕组采用id=0的控制方式;对于悬浮绕组采用iq=0的控制方式。三维有限元仿真结果表明,电动机可以产生独立并可控的推力和悬浮力。
2)从描述磁介质的分子环流假设出发,用毕奥-萨伐尔定理导出了永磁体外部空间磁场分布的解析表达式,基于由磁荷法和虚位移法给出的永磁体磁力数值积分公式,推导出电机悬浮力波动的解析模型。
3)对斜极结构的磁悬浮永磁直线同步电动机电动机进行三维瞬态有限元建模分析,仿真结果表明,采用斜极结构后由于齿槽定位力减小电机的推力和悬浮力的波动得到了明显的抑制。
[1]LEE Dongyeup,JUNG Chungil,YOON Kangjun.A study on the efficiency optimum design of a permanent magnet type linear synchronous motor[J].IEEE Transactions on Magnetics,2005,41(5):1860-1863.
[2]卢琴芬,叶云岳.混合励磁直线同步电机的磁场与推力[J].中国电机工程学报,2005,25(10):127 -130.LU Qinfen,YE Yunyue.Magnetic field and thrust of hybird excitation linear synchronous motor[J].Proceedings of the CSEE,2005,25(10):127-130.
[3]项倩雯,孙玉坤,张新华.磁悬浮开关磁阻电机建模与参数优化设计[J].电机与控制学报,2011,15(4):74 -79.XIANG Qianwen,SUN Yukun,ZHANG Xinhua.Modeling and parameters optimal design of bearingless switched reluctance motor[J].Electric Machines and Control,2011,15(4):74 - 79.
[4]POLINDER H,SLOOTEWEG J G,HOEIJMAKERS M J.Modeling of a linear pm machine including magnetic saturation and end effect:maxmum force to current ratio[J].IEEE Transactions on Industry Applications,2003,39(6):1681 -1688.
[5]秦伟,范瑜,李硕,等.电磁电动式磁悬浮装置的磁场分析和力特性研究[J].电机与控制学报,2012,16(1):67 -71.QIN Wei,FAN Yu,LI Shuo,et al.Characteristic and magnetic field analysis of electro-magnetic electro-dynamic levitation device[J].Electric Machines and Control,2012,16(1):67 -71.
[6]MORRISON C R,SIEBERT M W,HO E J.Electromagnetic forces in a hybrid magnetic-bearing switched-reluctance motor[J].IEEE Transactions on Magnetics,2008,44(12):4626-4638.
[7]冀溥,王秀和,王道涵,等.转子静态偏心的表面式永磁电机齿槽转矩研究[J].中国电机工程学报,2004,24(9):188 -191.JI Pu,WANG Xiuhe,WANG Daohan,et al.Study of cogging torque in surface-mounted permanent magnet motors with static eccentricity[J].Proceedings of the CSEE,2004,24(9):188-191.
[8]王兴华,励庆孚.永磁无刷直流电机空载气隙磁场和绕组反电势的解析计算[J].中国电机工程学报,2003,23(3):126-130.WANG Xinghua,LI Qingfu.Analytical calculation of no-load magnetic field and back EMF in brushless DC motors[J].Proceedings of the CSEE,2003,23(3):126-130.
[9]HARAN K,ANDREW M K.Investigation and simulation of fields in large salient-pole synchronous machines with skewed stator slots[J].IEEE Transactions on Energy Conversion,2005,20(3):604-610.
[10]LI Zhu,JIANG S Z,ZHU Z Q,et al.Analytical methods for minimizing cogging torque in permanent-magnet machines [J].IEEE Transactions on Magnetics,2009,45(4):2023 -2031.
[11]诸嘉慧,邱阿瑞,陶果.转子偏心及定子斜槽凸极同步发电机支路感应电动势的数值计算[J].清华大学学报:自然科学版,2008,48(4):453 -456.ZHU Jiahui,QIU Arui,TAO Guo.Numerical calculation of the branch voltage of a salient pole synchronous generator with eccentric rotor and skewed slots[J].Tsinghua Univ:Sci&Tech,2008,48(4):453 -456.
[12]周俊杰,范承志,叶云岳,等.基于斜磁极的盘式永磁电机齿槽转矩削弱方法[J].浙江大学学报:工学版,2010,44(8):1548-1522.ZHOU Junjie,FAN Chengzhi,YE Yunyue,et al.Method for reducing cogging torque based on magnet skewing in disc-type permanent magnet motor[J].Journal of Zhejiang University:Engineering Science,2010,44(8):1548-1522.
[13]ZARKO D,BAN D,LIPO T A.Analytical solution for cogging torque in surface permanent-magnet motors using conformal mapping[J].IEEE Transactions on Magnetics,2008,44(1):52 -65.
